
KISS sinHybrid – Sinwave / BackEMF Hybrid-Kommutierung

![]()
Inhaltsverzeichnis
KISS sinHybrid, eine neue Methode zur Kommutierung, bietet ruhigeren Motorenlauf, höhere Effizienz, ein back-EMF und setzt neue Standards im ESC Bereich. In diesem kurzen Artikel möchte ich versuchen das Thema so einfach und verständlich wie möglich zu erklären. Als aller erster Regler auf dem Markt hat der neue Flyduino KISS 32A Regler dieses Feature verbaut.
Vorweg gesagt: Ich bin kein Motor-Regler Experte und versuche hier so einfach wie möglich das Prinzip zu erklären. Vielen Dank auch an Felix von Flyduino, der mir in unzähligen Sprach/-Nachrichten und Bildern alles über sein neues sinHybrid System und das drumherum erzählt hat. Sollten hier Fehler sein, bitte ich euch mich darüber in den Kommentaren aufmerksam zu machen.
Was ist eigentlich Kommutierung
Kommutieren (lat. commuto: (ver)ändern, umwandeln) heißt die Polung des Stroms im Anker immer passend umzupolen, damit sich der Motor drehen kann. Ein Brushless Motor wie wir ihn im Copterbereich verwenden wird über drei Phasen angesteuert. Es gibt insgesamt 6 verschiedene Zustände in die ein Motor über seine 3 Phasen versetzt werden kann. Diese 6 Zustände wiederholen sich immer wieder. Je nach Motorart und Einsatzzweck gibt es verschiedene Arten der Ansteuerung.
Das Problem: Rotor-Position
Damit der Motorregler den Motor überhaupt korrekt steuern kann, muss er wissen in welcher Position sich der Rotor befindet. Dazu gibt es verschiedene sensor und sensorlose Varianten.
Hall-Effect Sensor
Über mehrere physischen Hall Effect Sensoren kann die Position ermittelt werden. Diese Art der Positionsbestimmung wird in unserem Hobby allerdings nicht eingesetzt.
FOC – Field Oriented Control
Bei dieser Methode wird der Strom von mindestens 2 (besser 3) Phasen gemessen um die Position des Motors zu berechnen. Im Racing Bereich verwenden wir diese Methode nicht, da wir für diese Art der Messung dem Motorregler das genaue Setup einprogrammieren müssten.
Das würde bedeuten, dass wir wissen müssen was für ein Motor es ist und wie dieser beschaffen ist (Wicklungen, Magnete usw). Darüber hinaus müsste Propeller und LiPo ebenfalls bekannt sein damit über die Strommessung eine genaue Angabe der Position gemacht werden kann.
Die Berechnung ist allein dadurch schon schwierig, dass sich durch die Fertigungstoleranzen wie KV Zahl (Anzahl Wicklungen) sowie mit der Zeit schwächer werdende Magneten unserer „Low-Cost“ Motoren immer andere Berechnungsgrundlagen ergeben.
DJI ist übrigens einer von wenigen Hersteller, der FOC und die Ansteuerung mit voller Sinuswelle unter anderem in dem E5000 System einsetzt.
Back-EMF – Back Electromagnetic Force
Dadurch, dass nicht wie bei der voll Sinuswelle immer alle Phasen an sind, sondern eine Phase abgeschaltet ist, kann man mit der Spannungsmessung an der offenen Phase die Position bestimmen. Heutige Brushless-Motoren geben übrigens eine nahezu perfekte Sinuswelle als Back-EMF zurück. Dies kann man testen, indem man den Motor drehen lässt (zum Beispiel mit einem Akkuschrauber) und mit einem Oszilloskop an den Phasen misst. Vorteil dieser Methode ist ganz klar, dass man die Position ziemlich genau berechnen kann und das ohne den Motor zu kennen oder festzulegen.

Arten der Kommutierung
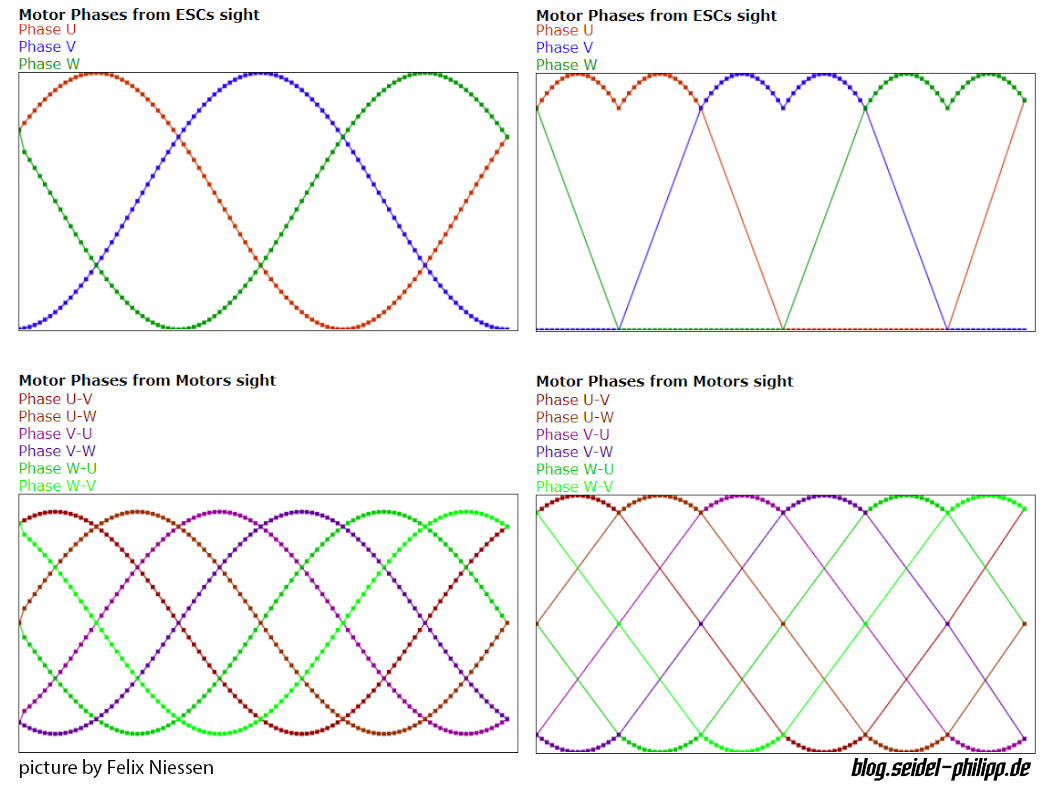
Um den Motor anzusteuern sind nachfolgende die drei häufigsten Methoden vereinfacht dargestellt. Bitte beachte, dass die nachfolgenden Darstellungen alle aus der Sicht des Motors sind und nicht aus der Sicht des ESCs. Es handelt sich bei der Sicht vom Motor aus um die Differenzen der Spannungen zwischen einzelnen Phasen.
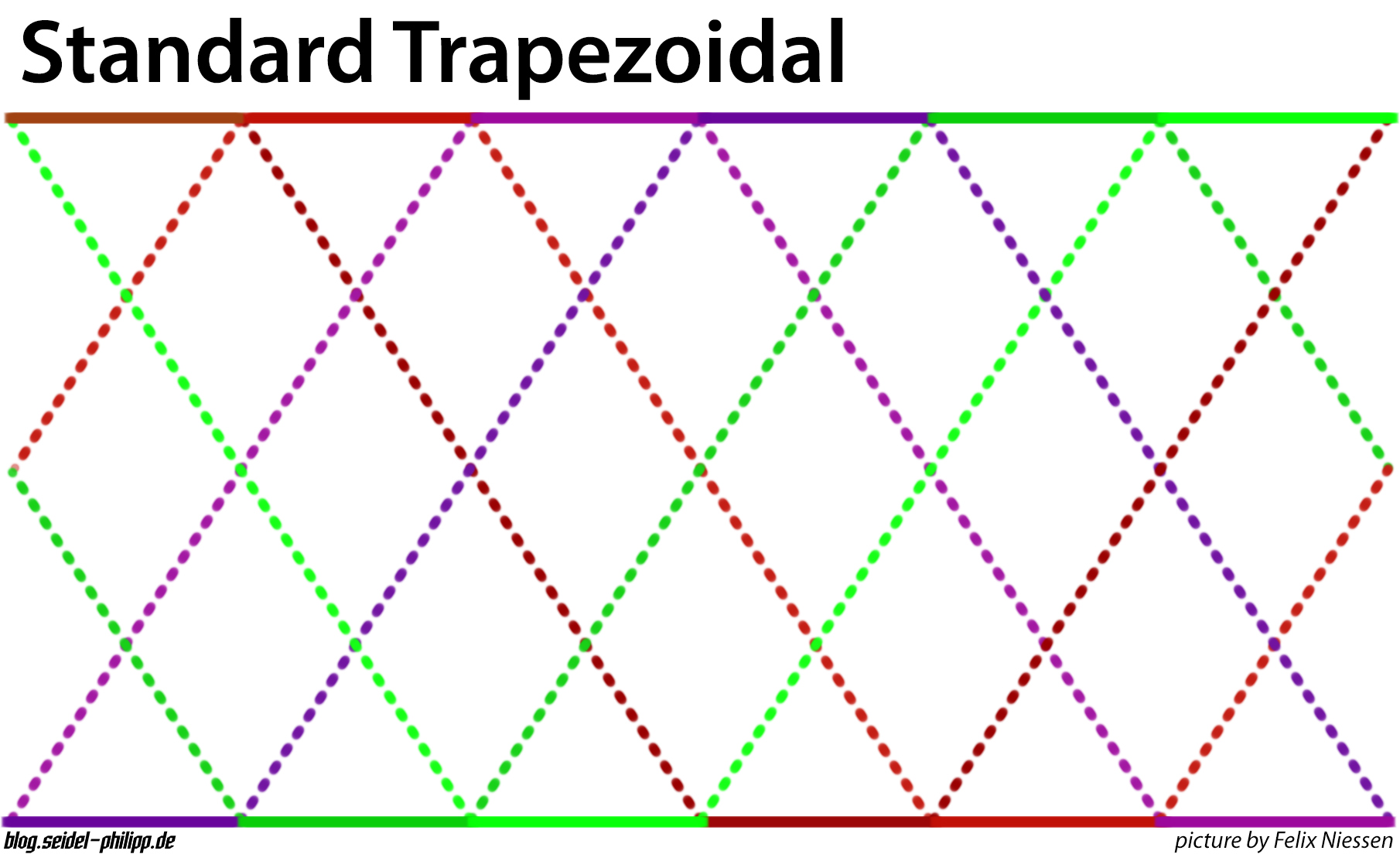
Trapez Block Kommutierung
Die einfachste Ansteuerung ist die Trapez Block Kommutierung, wie sie auch bei BLHeli zum Einsatz kommt. Dort werden nacheinander die Phasen umgepolt. Bei dieser Methode kann Back-EMF genutzt werden zur Positionsbestimmung. Nachteile bei dieser Art der Ansteuerung ist weniger Laufruhe und höhere Laufgeräusche, da der Motor „abgehackt“ angesteuert wird.
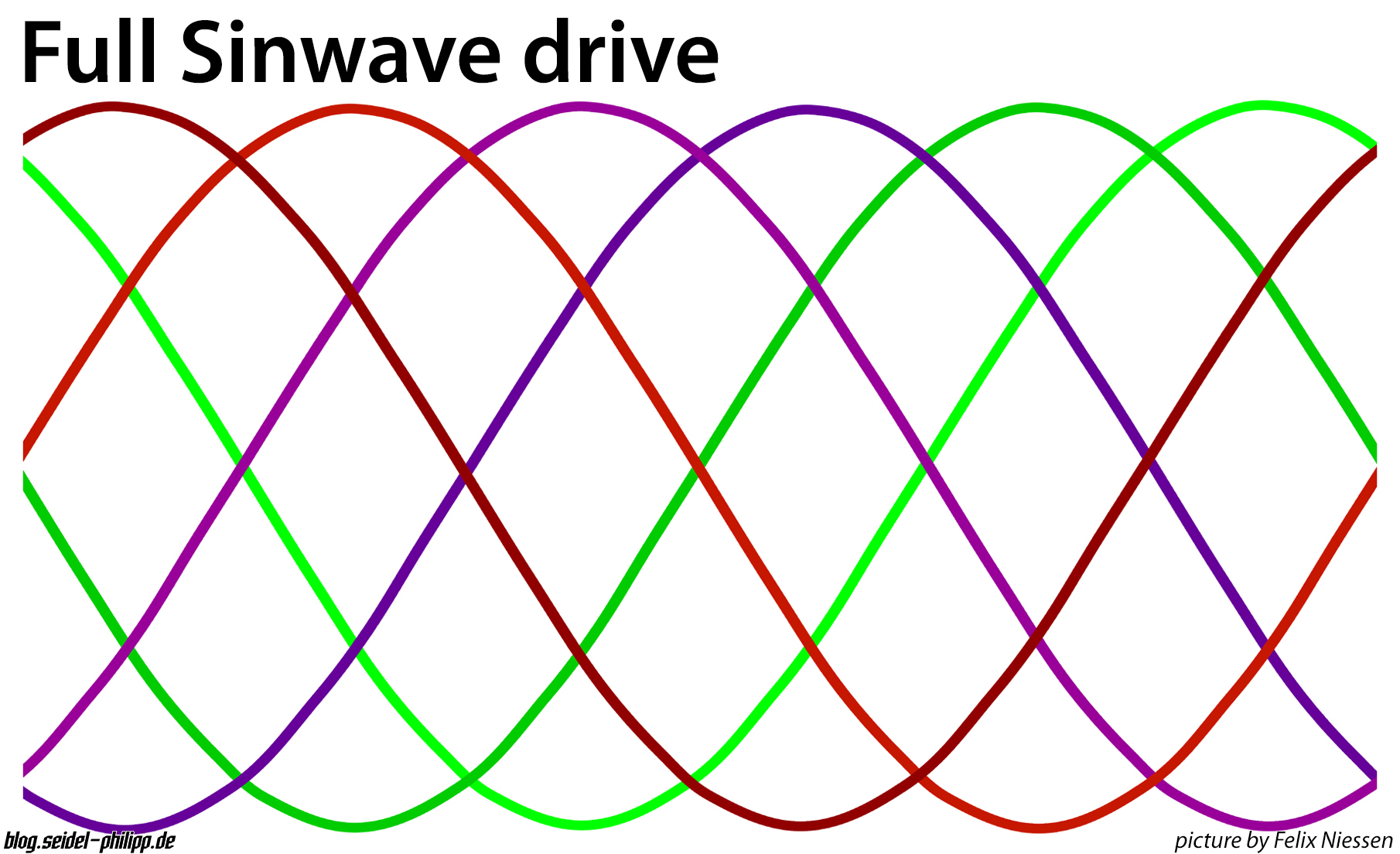
Voll Sinuskurve
Wie oben bereits erwähnt ist findet die Voll Sinuskurve nur mit FOC fähigen Reglern Anwendung. Diese Art der Ansteuerung hat diverse Vorteile gegenüber sinHybrid und der Trapez Block Kommutierung. Der Motor läuft sehr leise und effizient. Außerdem ist der laufruhiger was weniger Vibrationen verursacht. Allerdings findet diese Art der Ansteuerung im Racing Bereich keine Anwendung wie oben bereits erwähnt.
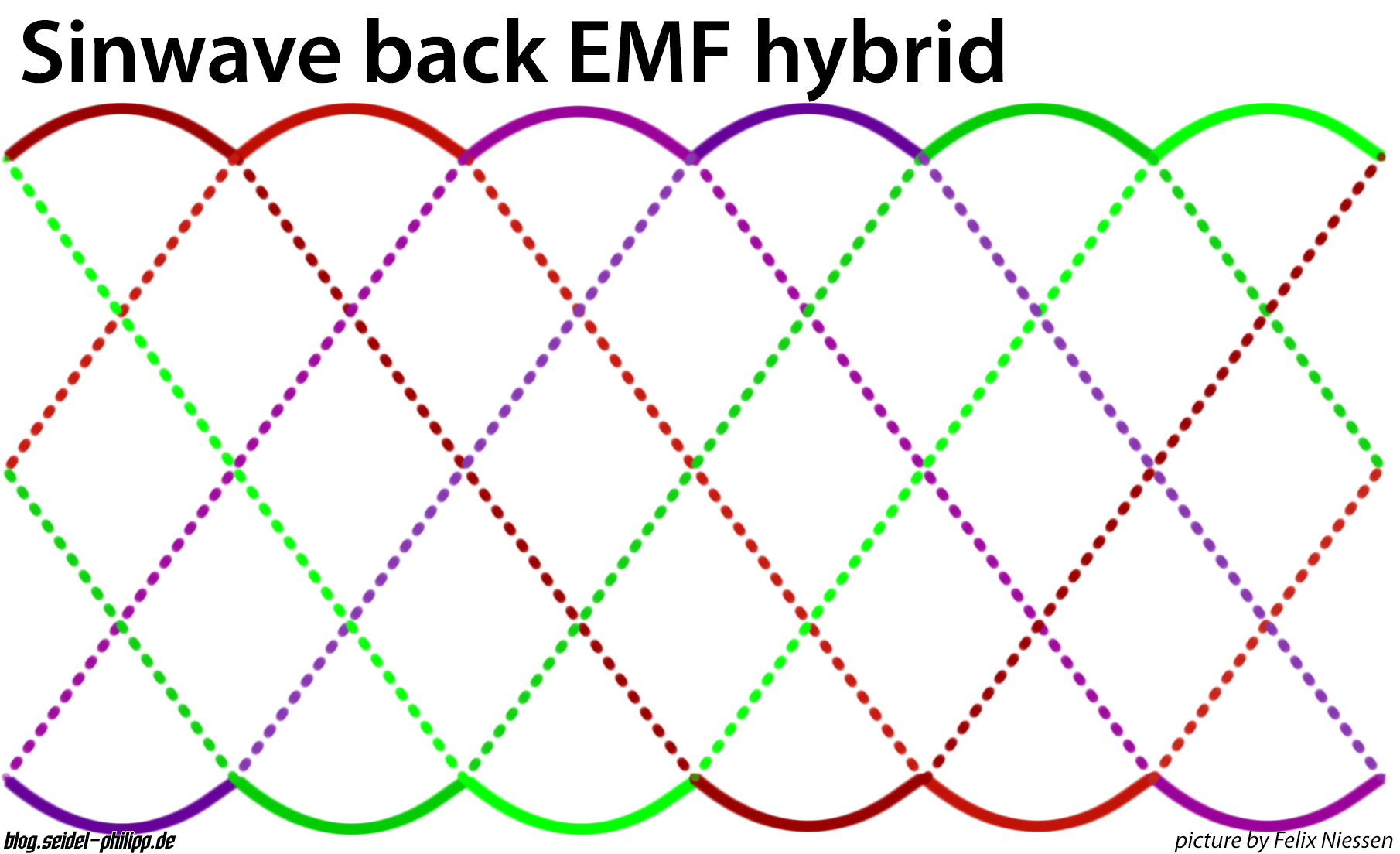
KISS sinHybrid
sinHybrid kombiniert die Trapez Block Kommutierung, steuert aber trotzdem dem Motor mit einer Art Sinuswelle. Dadurch läuft der Motor leiser und etwas effizienter. Ein weiterer Vorteil ist die verbesserte Laufruhe was weniger Vibrationen bedeutet. Je weniger Vibrationen dem Gyro ausgesetzt sind, desto besser und „smoother“ kann der Copter am Ende auch fliegen. Um einen kV-Verlust zu vermeiden, geht die Kommutierung bei etwa 90% Gas zu trapezförmiger Kommutierung über.

Jop jetzt hab ich’s auch verstanden ???
Ja da schließe ich mich meinem Vorredner an. Daumen hoch.
Toller artikel, super verständlich erklärt, danke Phil!