
FPV Wing aus Kopter-Teilen bauen mit INAV – Teil 1


Teil1: Komponenten und Verkabelung
Dieser Artikel wurde von meinem Gast-Autor Albert Kravcov geschrieben. Vielen Dank Albert für diesen Artikel und deine Zeit die du investiert hast!
Inhaltsverzeichnis
Vorwort
Nachdem ich einige Jahre Quads geflogen bin, war ich auf der Suche nach neuen FPV-Herausforderungen und bin schnell bei dem Thema „Wing“ hängengeblieben. Ein Wing bietet völlig andere Möglichkeiten als ein Quad: deutlich mehr Reichweite (kein Carbon im Weg), sehr viel längere Flugzeiten (Long Range-Potenzial) und ein sehr entspanntes Fluggefühl – das Letztere ist natürlich komplett von eurem Flugstil abhängig. 🙂
Falls das Thema auch bei euch Interesse geweckt hat, möchte ich euch in diesem Tutorial am Beispiel des Reptile S800 oder des Sonicmodel AR Wings zeigen, wie ihr einfach einen Wing aus Kopter-Teilen bauen könnt. Im ersten Teil konzentrieren wir uns auf die Auswahl der Komponenten und deren Verkabelung. In zweiten Teil werden wir uns mit der INAV-Konfiguration und mit den ersten Tuning-Flügen befassen.
Dieses Tutorial wird manche Themen überspringen, wie z. B. das Zusammenkleben des jeweiligen Modells oder das Flashen des Flightcontrollers – dafür gibt es bereits genügend Anleitungen im Netz. Schaut euch auf jeden Fall einige Montagevideos auf youtube an – hier bekommt ihr hilfreiche Tipps!
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren

Warum INAV?
Im Vergleich zu einem Kopter fliegt ein Wing nicht ganz so stabil – die Stabilität und Wind-Empfindlichkeit variiert von Modell zu Modell. Generell gilt: je größer die Flügelspannweite und Gewicht, umso stabiler liegt der Wing in der Luft. Hier kommt INAV ins Spiel und bringt darüber hinaus jede Menge anderer Hilfsmittel mit.
INAV entwickelte sich (wie auch Betaflight) aus der Cleanflight-Firmware, mit dem Schwerpunkt GPS-Navigation und Wing-Support. Die INAV-Firmware läuft auf fast allen modernen FCs und bietet neben einer Stabilisierung durch ein PID-System (PIFF), vor allem Spezialfunktionen für Wings und eine ausgereifte GPS-Unterstützung. Die gewohnten Funktionalitäten wie ein OSD-System (auf BFOSD FCs), LED-Strip, Telemetrie, u.s.w. sind natürlich auch mit an Bord. Wenn ihr also bereits in der Kopter-Welt zuhause seid, werdet ihr euch bei INAV schnell heimisch fühlen. Die Lernkurve ist nicht ganz so steil, aber es gibt viele neue Features und es ist daher sehr ratsam, das sehr gut ausgearbeitete WIKI durchzulesen – aber dazu später mehr.
Den INAV Configurator gibt es mittlerweile als Standalone-App für mehrere Betriebssysteme. Damit könnt ihr die INAV-Firmware auf den Flightcontroller flashen und alle Einstellungen treffen. Hier geht es zum Download: https://github.com/iNavFlight/inav-configurator/releases
Die Wings

Fangen wir mit den beiden Wings in unserem Beispiel an. Der S800 und der AR Wing haben eine ähnliche Spannweite und beide können eine HD-Cam in der Nase transportieren. Der AR ist etwas flexibler und kann mehrere Kamera-Typen aufnehmen (Runcam2/Session/Runcam3/Hero/Yi). Ich besitze beide und würde jedem, der noch nie ein Wing geflogen ist, den Skyshadow S800 empfehlen. Der AR Wing fliegt zwar stabiler als der S800 und bietet viel mehr Platz für größere Lipos, ist aber im Vergleich zum S800 empfindlicher bei Abstürzen. Das EPP des S800 kann wirklich viel einstecken und das Kit ist sehr günstig (um die 35€). Der AR Wing ist als zweiter oder dritter Wing eine super Wahl. Doch alleine wegen des Materials sind Wings allgemein weniger crashresistent, als Kopter aus Carbon. Mit etwas Kleber und Tape sind jedoch alle Risse recht einfach geflickt und man ist schnell wieder in der Luft!
Bei der Wahl des Wings (egal welches Modell) würde ich empfehlen die Kit-Version ohne Elektronik zu kaufen und eigene Komponenten zusammenzustellen – denn die ARF Versionen haben oftmals keine sehr hochwertigen Komponenten dabei und einen Teil davon habt ihr sicherlich bereits in eurer Ersatzteilkiste liegen.
Bevor es nun an das Antriebssystem geht, solltet Ihr euch erst die Frage stellen, wie ihr fliegen möchtet. Geht es euch um Geschwindigkeit oder um entspanntes Fliegen und möglichst lange Flugzeiten? Meine Empfehlungen für mögliche Konfigurationen sind:
| Wing | S800 | AR Wing | ||
| Zweck | Speed | Endurance | Speed | Endurance |
| Motor | 2205 2300kv | 2208 2000kv | 2205 2300kv | 2216 1400-1800kv |
| ESC | 30-40A | 30A | 30-40A | 30A |
| Prop | 5040 | 6045 | 5040 | 8040 |
| Lipo | 4S | 3S (3000mAh) | 4S | 3S (4000 mAh) |
| Flugzeit | 6-10min | 20-30min | 6-10min | 30-40min |
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
ESC
Da wir Quad-ESCs verwenden, stellt beim Aufbau eures Wings sicher, dass der ESC genügend Luft abbekommt (ganz besonders bei Power-Setups). Quad-ESCs werden normalerweise auf dem Kopter-Arm direkt unter dem Propeller montiert und sind dort automatisch mit ausreichend Strömungsluft versorgt. Der S800 bietet zum Beispiel eine gute Möglichkeit den ESC außen unter dem Wing zu montieren.
FC Auswahl
Im Grunde könnt Ihr jede unterstützte FC für INAV verwenden. Die Liste steht in dem „Firmware-Flasher“ Tab des INAV Configurators. Ein GPS ist natürlich kein Muss, empfiehlt sich aber um den vollen Funktionsumfang von INAV auszuschöpfen. Ein GPS-Modul gibt euch die Möglichkeiten RTH(Return to Home) und POSHOLD zu nutzen – sogar das autonome Fliegen nach Waypoints ist möglich! Das Wichtigste ist jedoch, dass das System im Falle eines Failsafes automatisch auf RTH zurückgreifen kann.
Solltet ihr ein GPS-Modul verwenden wollen, schränkt es die FC-Auswahl etwas ein. Für GPS-basierte Flugmodi benötigt Ihr idealerweise eine FC mit Barometer.
Tipp: falls ein FC kein Barometer an Board hat aber über I2C Ports (SCL/SDA) verfügt, könnt Ihr auch ein externes Barometer-Modul anschließen.
Darüber hinaus, empfehle ich ein Board mit BFOSD, um alle Telemetrie Daten und GPS Richtungshinweise in dem Videofeed zu sehen. Einen Kompass-Sensor (Mag) benötigt man für einen Wing nicht.
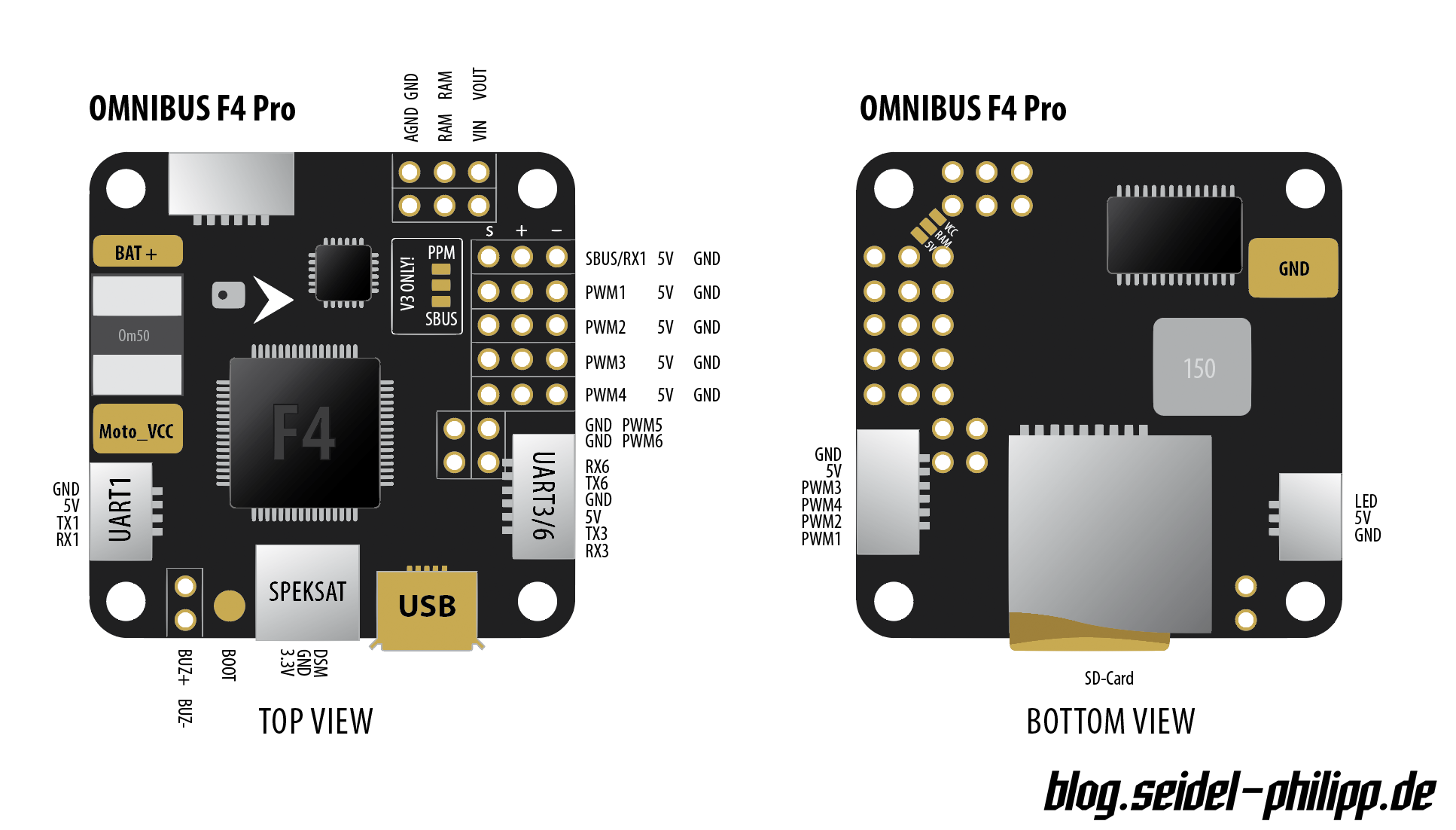
In diesem Beispiel verwende ich das populäre OMNIBUS F4 Pro Board weil es über ein Barometer, ein OSD, einen Current-Sensor und einen SD-Kartenslot für die Blackbox verfügt. Omnibus F3 Pro wäre ebenfalls eine gute Wahl. Das Board wird meistens ohne Kabel geliefert, also nicht vergessen diese mitzubestellen! (s. Teile-Liste)
Tipp: F1 Boards (z. B. Naze32) unterstützt INAV nur in einer sehr abgespeckten Form und bald wird der F1-Support komplett gestrichen – also lieber nicht verwenden!
Ganz egal für welches Board ihr euch entscheidet – der Aufbau kann aus diesem Beispiel einfach abstrahiert werden.
Servos/Stromversorgung
In Verbindung mit einem Flightcontroller eignen sich Digital-Servos besser, weil diese sehr viel feiner angesteuert werden können. Bitte kauft möglichst keine Servos mit Plastikgetriebe – diese sind nicht sehr widerstandsfähig und somit nicht sehr langlebig.
Wichtig: Die Servos werden mit 5V betrieben, können aber ziemlich viel Strom ziehen. Daher vermeidet auf jeden Fall die Servos direkt am FC (oder vom selben 5V BEC wie die FC) zu betreiben. Sonst riskiert ihr einen Reboot der FC mitten in der Luft im Falle eines Brownouts (Spannungsabfall). Das würde logischerweise sofort zu einem schweren Crash führen. Die Servos benötigen ihren eigenen 5V BEC der 3A liefern kann.
BEC/PDB
Da wir in diesem Beispiel die Omnibus F4 pro verwenden und einen separaten 5V BEC für die Servos benötigen, bietet uns ein PDB mit einem 3A 5V BEC eine gute Möglichkeit den Aufbau deutlich einfacher und sauberer zu gestalten. Die Omnibus Pro Boards wurden für die Verwendung mit PDBs oder 4in1 ESCs konzipiert. Das PDB ist in dieser Anleitung jedoch optional und kann aus Platzgründen auch durch einen kleine 5V BEC ersetzt werden.
FPV-Komponenten
Ich verwende in meinem Beispiel einfach die gängigen FPV-Komponenten die ich bereits hatte. Eine Runcam Swift mit einem FT48X Videosender.
Empfohlene Teileliste
TEILELISTE S800
- S800 Kit
- 2x EMAX Digital-Servos
- Servo-Verlängerung (optional)
- Omnibus F4 Pro V3
- Omnibus Kabel-Set
- FC Befestigung (alternativ selber drucken oder drucken lassen)
- MT2208 2000kv Motor (S800 Endurance Version)
- EMAX RS2205 2300KV Motor (S800 Speed Version)
- Racerstar 30A ESC
- Frsky XM+ oder R-XSR Receiver
- Antennenhalter (optional) (alternativ selber drucken oder drucken lassen)
- Runcam Swift 2 oder Runcam Eagle 2
- VTX FT48X (SMA)
- Antenne Aomway (SMA)
- SMA Winkel
- GPS Modul
- LC-Filter
- PDB mit 3A BEC
- 5V BEC
- Buzzer
- LEDs (3S Lipo) oder LEDs (4S Lipo)
- Trimmgewichte
- Props (5040/6045)
TEILELISTE AR Wing
Selbe Teile wie oben bis auf:
Außerdem benötigt ihr für den Zusammenbau
- Heißkleber
- Gewebe-Klebeband
- UHUPor Kleber
- M3 Nylon 5-6mm Standoffs und Schrauben
- Lötkolben + Lötzinn
- Schrumpfschlauch in mehreren Größen
- AWG14/16 Kabel und einXT60 Stecker (beim S800-Kit bereits dabei)
- Dünne Litze in mehreren Farben
- 2x Servo-Verlängerung (beim S800-Kit bereits dabei) > Link s. Teileliste
INAV flashen
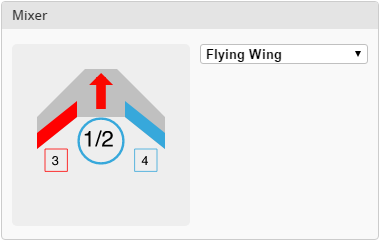
Bevor ihr den Flightcontroller verbaut, flasht zuerst INAV drauf und überprüft die Funktion der Sensoren im „Sensors-Tab“. Stellt anschließend den Mixer im „Configuration-Tab“ auf „Flying Wing“. Hier wird schon ersichtlich an welche Motoranschlüsse die entsprechenden Antriebskomponenten angeschlossen werden sollen.
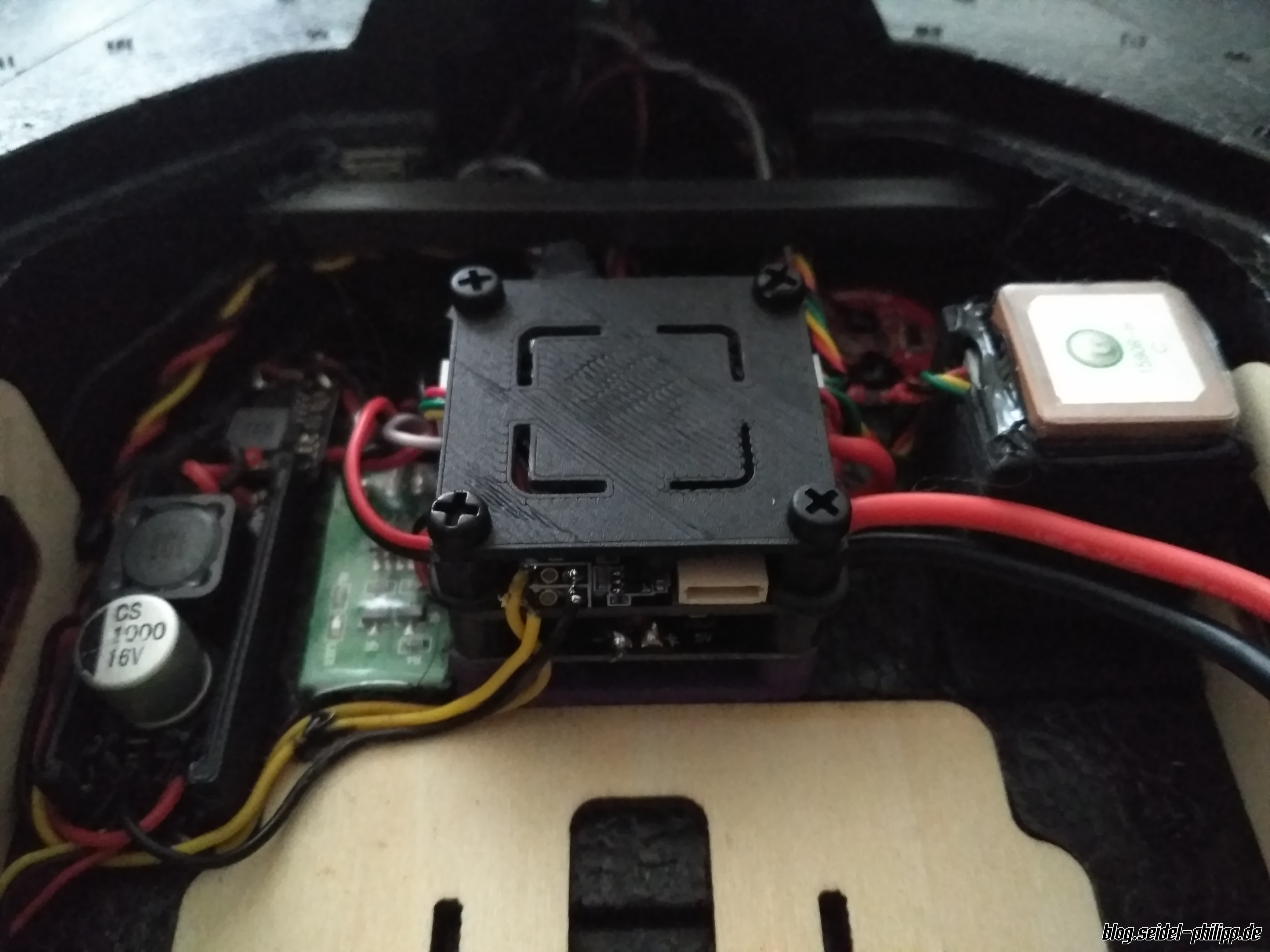
FC Stack-Montage
Als erstes montieren wir die FC in das Batteriefach. Um die FC zu befestigen eignet sich am besten ein FC-Halter – dieser hat eine glatte Fläche und kann super mit Kleber oder doppelseitigem Klebeband am Boden befestigt werden (so gerade, wie möglich ausrichten).
Tipp: Es gibt auch genügend FC-Halter auf Thingiverse die ihr selber drucken könntet.
Hier zum Beispiel einer von mir: https://www.thingiverse.com/thing:2645074 (M3 Einpress-Gewinde benötigt)
Wenn der Halter platziert ist, können die Standoffs und das PDB montiert werden. Bedenkt beim Montieren der Boards die freie Zugangsmöglichkeit zum USB-Anschluss und die Lipo-Kabel. Hier bietet es sich an das Board um 90° zu drehen, damit alles frei zugänglich ist.
PDB und Antriebssystem anschließen
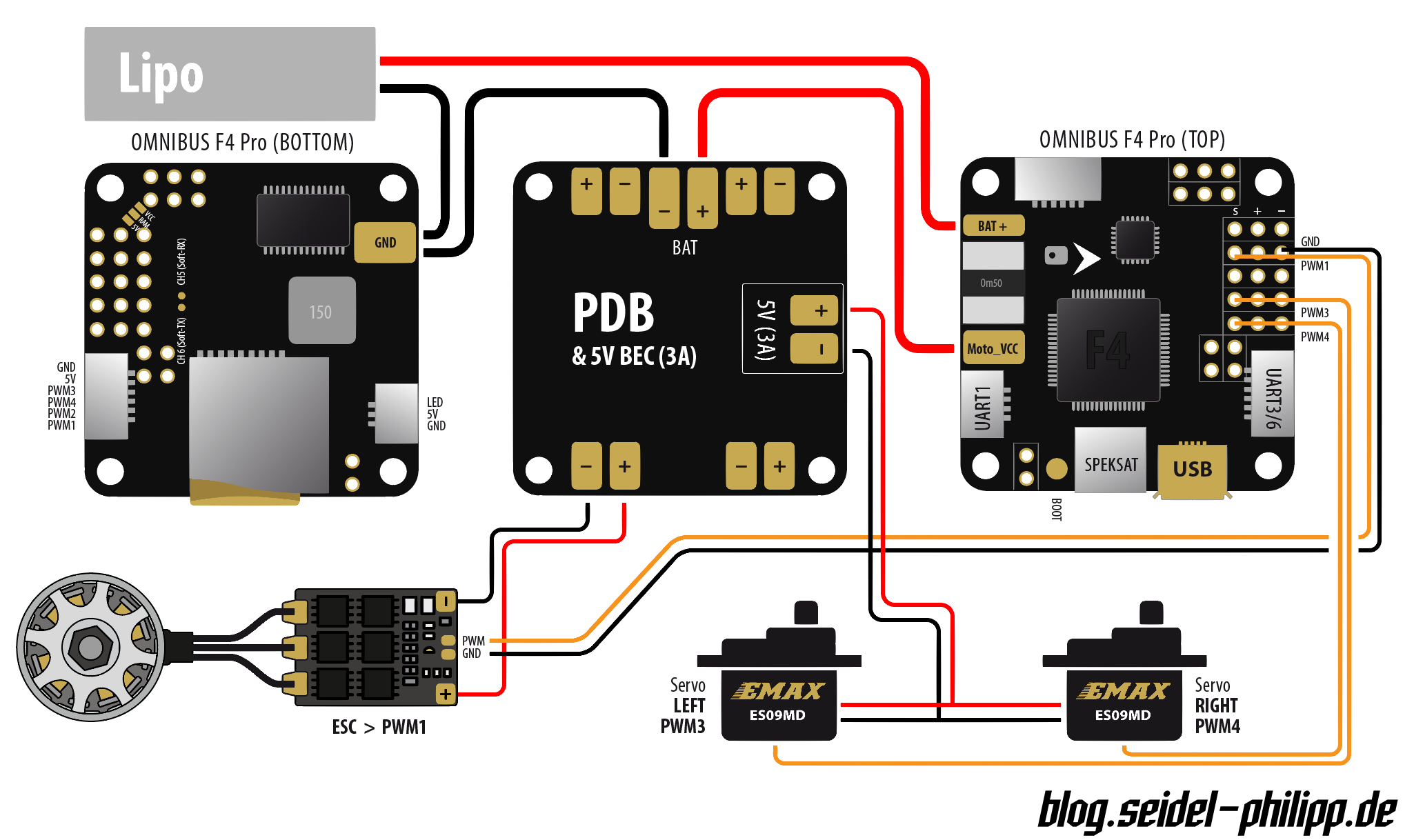
Damit der Stromsensor auf dem Omnibus funktioniert, müssten alle Verbraucher die am PDB hängen werden korrekt verkabelt werden. Hierzu benötigen wir ein dickeres AWG14-16 Kabel mit einem XT60-Stecker für den Lipo. Lipo+ kommt an das „Bat+“ Pad und Lipo- an das große „GND“ Pad auf der Unterseite des FCs. Von demselben „GND“ Pad aus ziehen wir ein zusätzliches kurzes Kabelstück an das „Bat-„ Pad des PDB. Das „Bat+“ Pad des PDBs wird mit dem „Moto_VCC“ auf der Oberseite des FCs verbunden.
Nun bauen wir auch das Antriebssystem und die Servos ein (s. Schaltplan oben).
Der ESC wird direkt an das PDB angeschlossen. Die Signalleitung (helles Kabel) des ESCs kommt an den S1 Pin der FC. Der Motor wird an den ESC angelötet. Um die Motordrehrichtung brauchen wir uns jetzt noch keine Gedanken zu machen.
Die Servos werden vom PDB (alternativ von einem separaten BEC) mit 5V versorgt.
Das PWM-Signal-Kabel verbinden wir mit S3 (linke Tragfläche) und S4 (rechte Tragfläche).
Tipp: Bitte verklebt die Servos noch nicht in den Tragflächen und verschraubt die Steuerhörner ebenfalls noch nicht an die Servos. Wenn die Antriebskomponenten installiert sind, schließt kurz den Lipo an und die Servos springen in ihre neutrale Stellung. Jetzt können die Hörner an den Servos im rechten Winkel zur Tragfläche verschraubt werden.
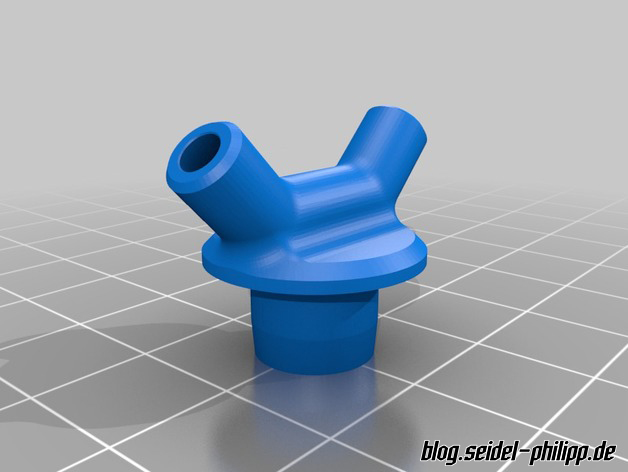
Reflex: Um gerade zu fliegen, benötigt ein Wing ein wenig hochgestellte Elevons (So werden die Ruder eines Fixed-Wing genannt).
In der Neutralposition des Servos sollten die Elevons in etwa 3-4mm nach oben stehen (s. Bild unten).

Kalibriert auch an dieser Stelle schon den ESC in dem „Motor-Tab“ des Konfigurators.
Um die weitere Konfiguration kümmern wir uns im Teil 2 dieser Anleitung.
FPV Komponenten anschließen
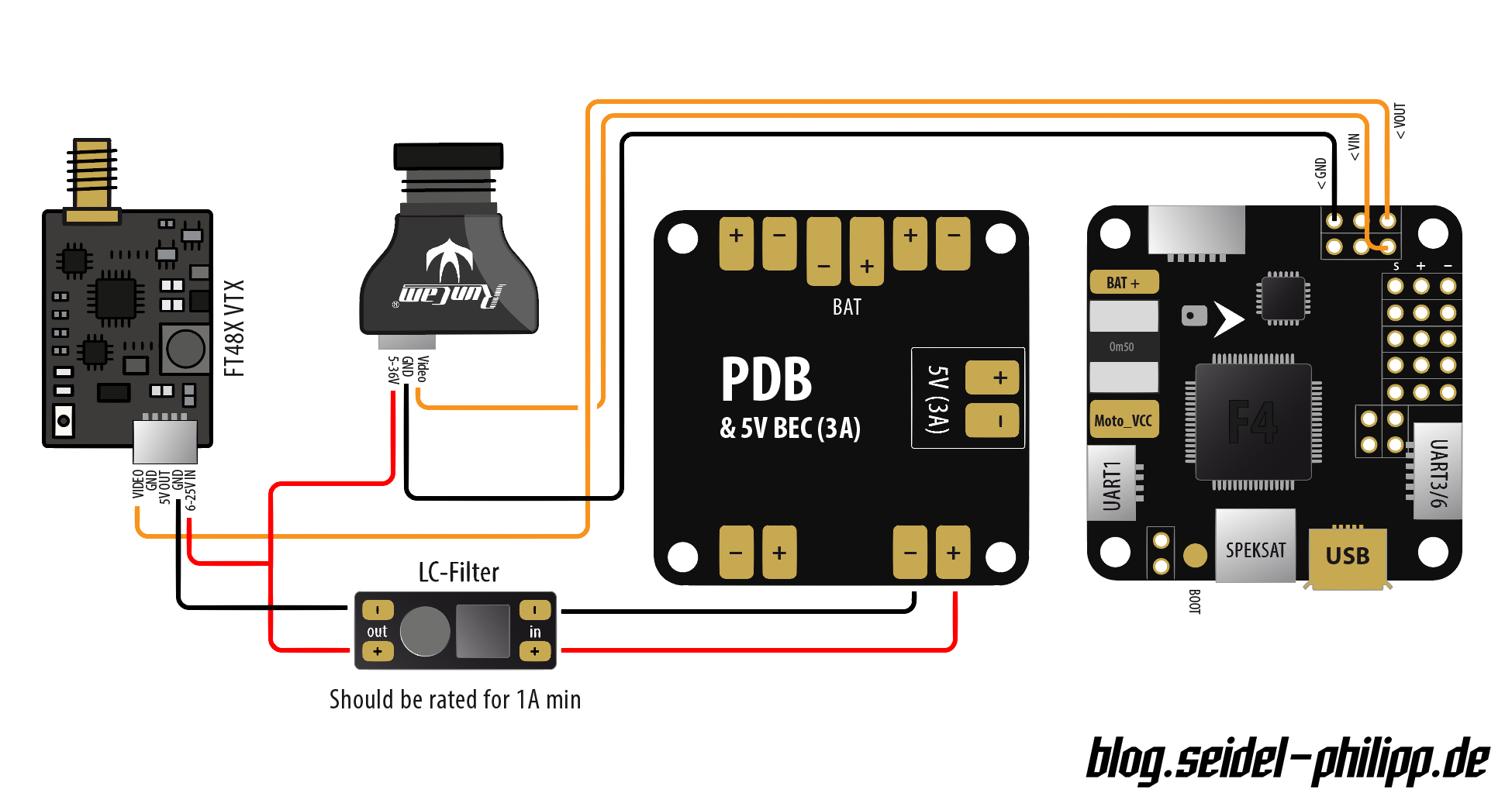
Dieses Schaubild erklärt wie die FPV-Komponenten angeschlossen werden. Das Videosignal der FPV-Kamera wird durch den Flightcontroller geschleift, damit das OSD in den Videofeed projiziert werden kann.
Der FC hat für die Stromversorgung der FPV-Komponenten spezielle „RAM“ Pins, die man mit einem Lötjumper wahlweise auf 5v oder Lipo-Spannung stellen kann. Leider gibt es bei manchen Versionen des Boards Probleme mit dem Current-Sensor – daher verwende ich die „RAM“ Pins in meinem Schaltplan erst gar nicht.
Der VTX und die Kamera werden direkt vom PDB mit Strom versorgt. Ein LC-Filter dazwischen reduziert die Störungen im Bild. Die Kamera kann alternativ an den 5V-Out des Videosenders angeschlossen werden – das würde aber zwei zusätzliche lange Kabel benötigen wenn der Videosender im Flügel verstaut ist.
Tipp: Verdreht eure Signalkabel mit GND-Kabeln in sich – ganz besonders wenn diese eine längere Strecke zu überwinden haben. Das reduziert die Störungen im System.
Receiver anschließen
Je nach Typ eures Receivers, findet Ihr die Anschlusspläne in dieser Skizze:
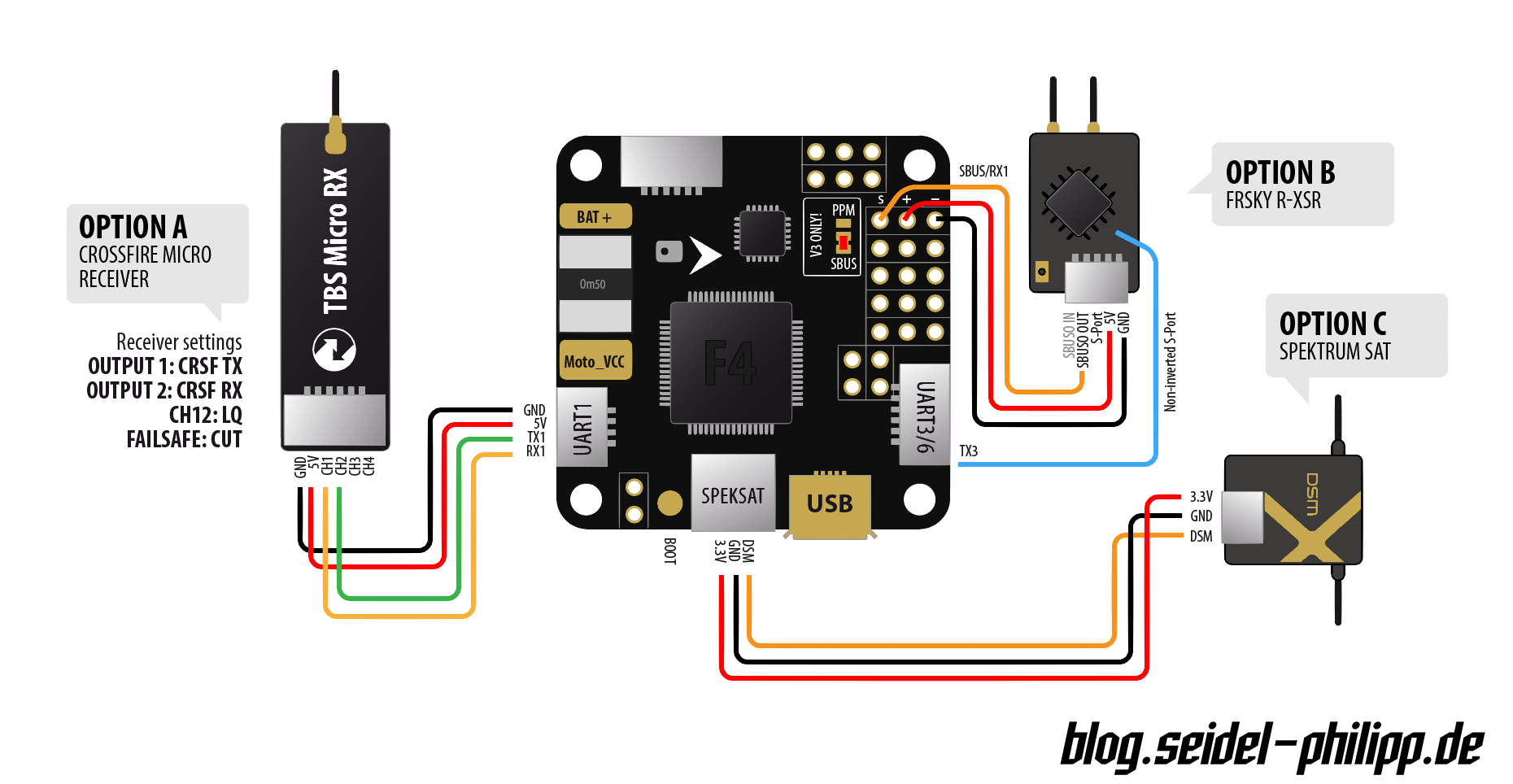
Beispiel A: Crossfire Micro Receiver
Der Omnibus bietet einen nicht invertierten UART1 in Form einer (JST-SH 4pin) Buchse. Diese eignet sich hervorragend für diesen Empfänger. Bitte stellt im Receiver die Outputs für CH1 und CH2 auf CRSFTX/RX, damit der Empfänger über das CRSF Protokoll kommuniziert und gleichzeitig Telemetrie-Daten senden kann.
Beispiel B: FrSky Receiver
FrSky SBUS ist ein invertiertes Signal und muss an den einzigen Pin angeschlossen werden, der über einen Inverter verfügt – das ist der SBUS-Pin am FC.
Die Version 3 des Omnibus F4 pro verfügt über eine zusätzliche Lötbrücke (s. Bild oben). Hier muss das mittlere Pad mit dem Pad mit der Bezeichnung „SBUS“ zusammengelötet werden.
Wenn Ihr über einen telemetriefähigen Empfänger verfügt (z.B: Frsky R-XSR), sollte das nicht invertierte S-Port-Signal am Empfänger angezapft und mit TX3 am FC verbunden werden (JST-SH 6pin Buchse).
Beispiel C: Spektrum Sat
Der Omnibus besitzt eine Spektrum-Sat-Buchse. Hier kann der Spektrum-Satellit ganz einfach eingesteckt werden.
Antennenposition
Je nachdem, wo ihr euch entschieden habt den Receiver unterzubringen, solltet ihr die Antennen sauber im 45-Grad-Winkel möglichst vertikal rausführen. Hierfür eignet sich ein Antennenhalter von FrSky (s. Teileliste) oder ein gedruckter Halter für Antennenröhrchen von Thingiverse:
Falls Ihr einen Crossfire-Empfänger verwendet, montiert bitte die Antennen in einer Linie vertikal durch den Flügel. Für den unteren Antennen-Part eignet sich super ein Kabelbinder mit Schrumpfschlauch – so bleibt dieser Teil flexibel und kann sich bei Landungen biegen.

GPS und Buzzer anschließen (optional)
Kurz vorweg: Diese beiden Komponenten sind optional und sind nicht unbedingt zum Fliegen notwendig aber sehr nützlich.
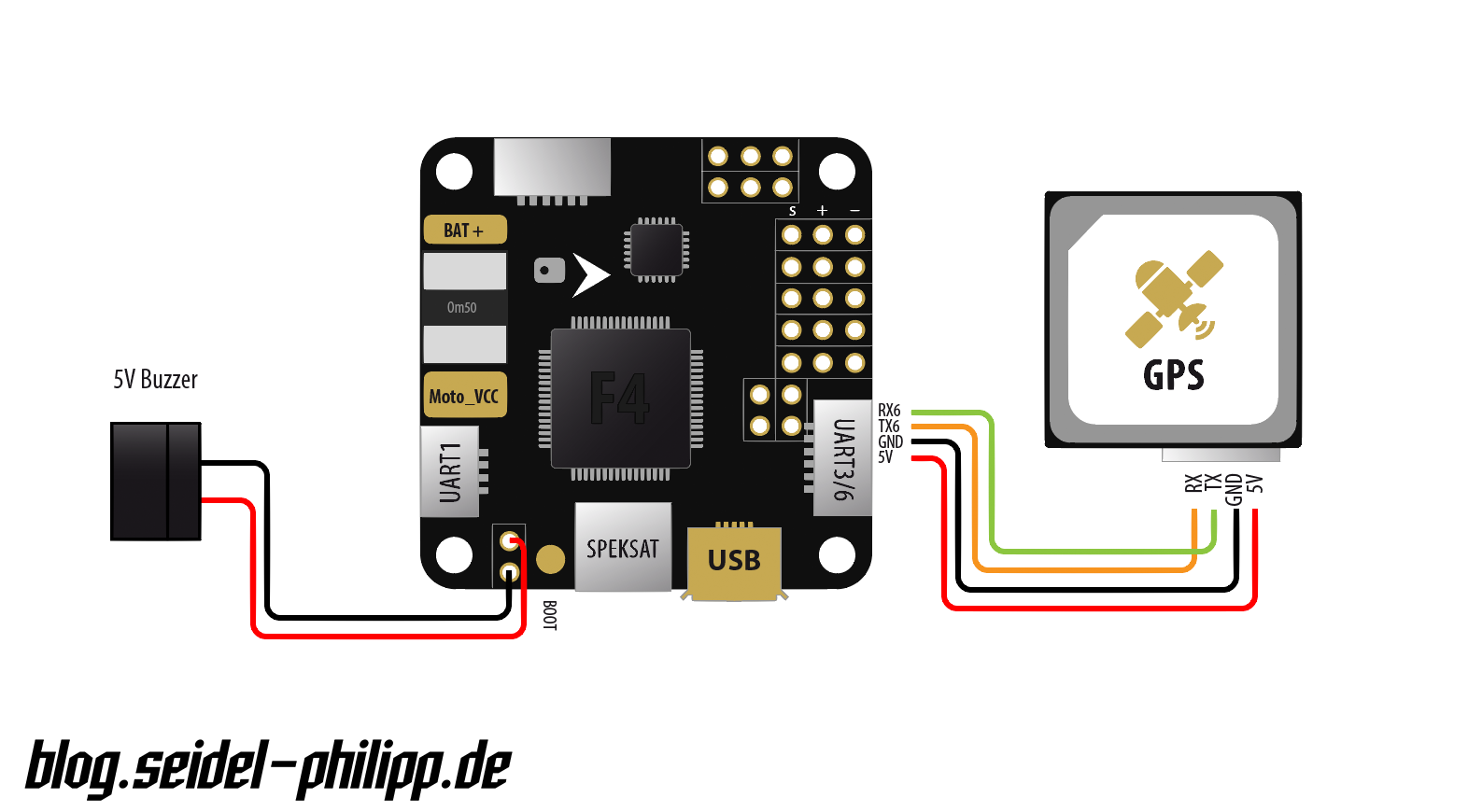
Mit dem GPS-Modul (M8N GPS) könnt ihr den vollen Funktionsumfang von INAV ausschöpfen und habt im Fall eines Failsafes oder bei Verlust eures FPV-Feeds eine Return-To-Home-Möglichkeit (RTH), die euren Wing sicher zurückholen kann.
Das GPS-Modul muss keine freie Sicht haben und kann im Flügel oder im Batteriefach – nach Möglichkeit etwas getrennt von Stromleitungen – verstaut werden. Das GPS benötigt bei einem Kaltstart immer etwas Zeit, um genügend Satelliten zu finden (ca. 1 bis 2 Minuten).
Der Buzzer gibt bei Fehlermeldungen, Warnungen, einem erfolgreichen Satelliten-Fix und bei bestimmten Flug Modi eine akustische Meldung. Außerdem kann er als Lost-Model-Alarm verwendet werden. Bitte platziert den Buzzer beim Einbau möglichst weit vom GPS weg da dieser ein Magnetfeld erzeugt.
Schwerpunkt (CG)
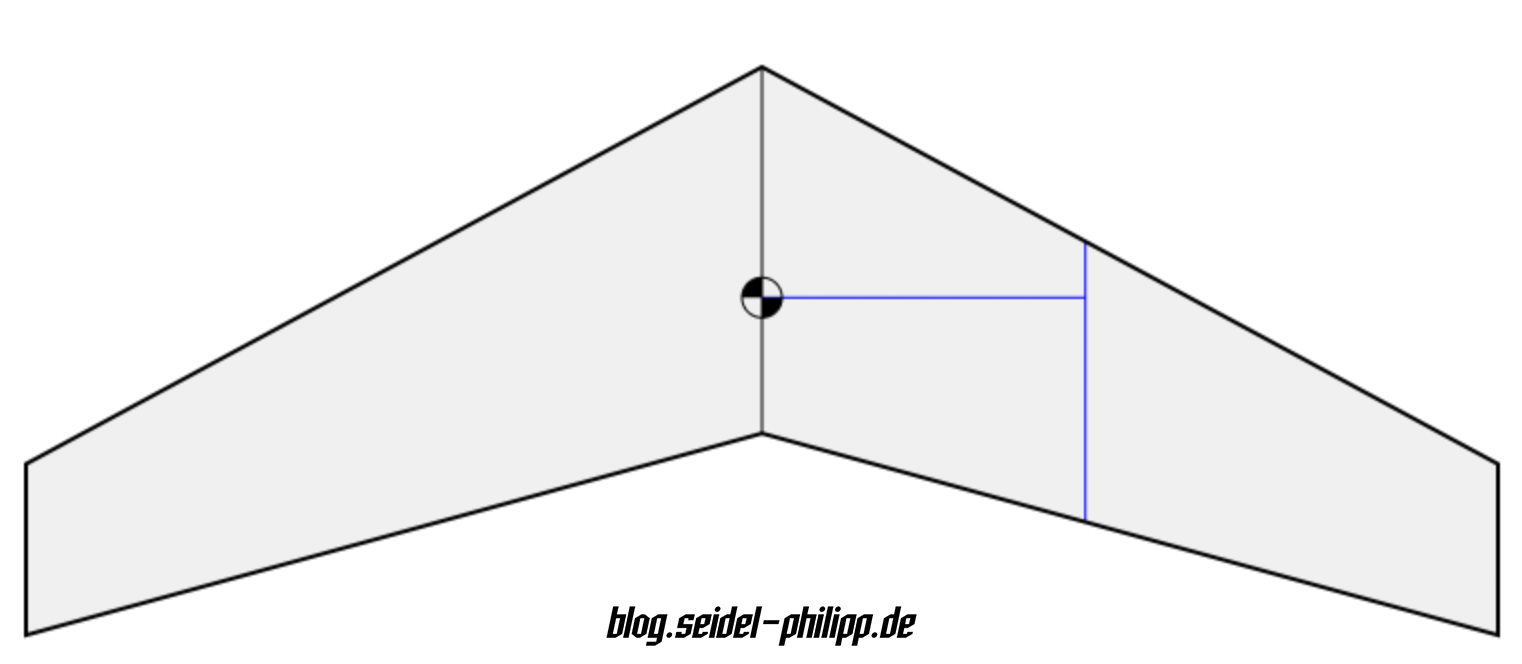
Für einen Wing ist der genau ausbalancierte Schwerpunkt (CG) sehr entscheidend für das Flugverhalten. Ist der Schwerpunkt nicht korrekt, fliegt der Wing irgendwo zwischen schlecht und fast unkontrollierbar.
Nachdem alle Komponenten sicher verstaut und angeschlossen sind, muss der Schwerpunkt ausbalanciert werden. Bitte legt den Lipo eurer Wahl in das Batteriefach. Falls ihr eine HD Kamera in der Nase führen möchtet, sollte auch diese dafür montiert werden. Der Wing sollte also in Flugfertigen Zustand vor euch liegen.
In dem Manual des S800 oder des AR Wings ist der CG Punkt angegeben. Nehmt zum Beispiel eine Flasche und stellt diese unter dem Wing, an dem Punkt wo der CG-Punkt im Manual eingezeichet ist. Der Wing muss auf dieser Stelle balancieren. Ich verwende für die Trimmung der Tragflächen und der Nase selbstklebende, 5g schwere Stahlgewichte (s. Teileliste).
INAV Konfiguration und Erstflüge
Im zweiten Teil der Anleitung erkläre ich euch, welche Einstellungen ihr in INAV treffen müsst, um euren Wing in die Luft zu bringen
Klicke auf das Bild um zum zweiten Teil zu gelangen!


Hallo,
ist es möglich das OMNIBUS F4 Pro mit INAV über eine Flysky FS-i6X anzusprechen?
Welcher Receiver würde empfohlen werden?
Danke
Hi C,
ich kenne mich nicht Flysky weniger aus, aber jeder Empfänger sollte funktionieren. Welchen du verwendet möchtest liegt an dir. Da gibt es sicherlich Unterschiede in Größe/Reichweite/Features (z.B Telemetrie).
Gruß,
Phil
Hallo zusammen,
ich hoffe das mir jemand hier weiter helfen kann…. Ich habe bei INav das Problem das die Servos volle Ausschläge machen und kurze Zeit später sich nur noch im 1 bis 2mm Bereich bewegen…. solange das mein s800 am Boden ist kann ich damit leben in der Luft fände ich das nicht ganz so toll… sobald ich ich dann ich den manuellen Flugmodus schaltet laufen sie wieder muss also was mit der Stabilisierung sein….. hat jemand eine Idee? Danke Gruß tobse
Also bei mir geht im tab der motor,Funke geht auch über inav ausschlägt,aber Funke auf motor gar nicht
Sos
Hey Robert,
da kann ich auf jeden Fall den Otto (Hakan) zitieren:
https://ottomachtfpv.de/2018/11/26/inav-basics-teil-2-flightmodes/
Gruß,
Phil
Ich will ein größeren Nuri mit einem INAV FC ausstatten und benötige aber für das digitale DJI Ocusync die OSD Anbindung per UART.
Etwa so :https://forum.dji.com/forum.php?mod=attachment&aid=Njg0MDZ8ZGZmZTI4MTR8MTU0NTg1MDUzMXwwfDEyNDY5Ng%3D%3D¬humb=yes
Ist dies auch mit dem von dir empfohlenem Board moglich?
Hallo Pilipp,
danke für diesen tollen Beitrag! Ich möchtre ich demnächst selbst an den Bau eines Wing´s wagen und hab nur eine Frage zu dem AR-Wing. Sind da „Schächte“ in den Flügeln für RX und VTX wie beim S800 oder hast du die nachträglich selbst irgedwie hinzugefügt?
Danke schonmal!
LG Alex
Hallo,
welche Prop-Größe passt maximal auf den AR Wing ? Sieht auf Bildern so aus, als wenn da kein 8Zoll (wie bei Endurance empfohlen) drauf passt. Und kann man sich mit dem verlinkten GPS auch Koordinaten im Osd oder auf dem Sender anzeigen lassen?
Hey Bjarne,
ich habe mal eben 8×4 APC Propeller drangehalten. Die passen auf jeden Fall. Da ich aber auch den Endurance Motor habe und die Glocke sehr lang ist, kommt der Propeller auch weit genug weg von dem Flaps.
Ja, mit dem verlinkten GPS ist beides möglich! Zurück zum Sender musst du die Koordinaten aber per Telemetrie senden!
Gruß,
Phil
Hi Philipp,
echt interessanter Beitrag. Hast du evtl. Erfahrung mit der Geschwindigkeitsmessung via pitot tube? GPS gibt ja nur die Geschwindigkeit über Grund aus.
Die Geschwindigkeit des Wings im Verhältnis zur Luft wäre aus meiner Sicht da viel interessanter (z.b. Stall bei Rückenwind aufgrund zuwenig Auftrieb).
lg
hallo
ich hab ein problem in dem du mir vielleicht helfen kannst.
ich bekomme aus dem fc kein motor signal ?d.h. alle servos laufen wie sie sollen nur dreht der motor nicht .auch nicht in inav.
vielleicht hast du eine lösung.
baue keinen wing sondern einen segler gerade um.ich hab zwar den omnibua f4 v3 pro bestellt aber der kam schaut anders aus wie in deiner beschreibung .ich hab die +- pats nicht drauf.
danke gruss michael
Hey,
hast du den richtigen Motor/ESC-Signal-Ausgang verwendet?
Gruß,
Phil
Vielen Dank für die tolle Anleitung!
Leider scheint bei mir etwas schief gegangen zu sein.
Als FC benutze ich den F4pro V2 und habe alles so verkabelt wie von dir dargestellt. Nur die Cam werde ich erst später einbauen.
Bevor ich damit angefangen habe, habe ich INAV geflasht und geschaut ob der FC funktioniert. Alles war bestens und auch das GPS wurde erkannt.
Jetzt habe ich alles verkabelt (viel Lötkram) und als nächstes sollte es mit der Konfig weiter gehen.
Mein PC erkennt den FC jetzt aber überhaupt nicht mehr, er bemerkt ihn nicht mal. Strom bekommt der FC aber über USB.
Auch mit Akku passiert am PC nichts. Betriebssystem ist Win10. Ach ja, die grüne LED leuchtet dauerhaft und die blaue blinkt auf dem FC.
Ich hoffe, ich habe den FC nicht durchs löten gekillt!?
Hoffentlich kann mir weiter geholfen werden.
Hey Johannes,
Sorry für die späte Antwort, habe den Kommentar in dem Spam Ordner entdeckt!
Besteht das Problem weiterhin?
Gruß,
Phil
Vorab: TOP Beitrag!
sehe ich das richtig das bei zB bei dem XSR sowohl der Sbus als auch der Non-invertet S-Port angeschlossen werden muss?
Hey Mirco,
SBUS läuft auf F3 und F4 ohne „exta“ Invertierung. SmartPort muss auf manchen F4 Boards „inverted/uninverted“ werden.
Gruß,
Phil
Hallo!
Super Tutorial, vielen Dank!
Ich würde aber gerne ein Bn220-GPS nehmen (https://m.banggood.com/Dual-BN-220-NEO-M8N-GPS-GLONASS-Antenna-Module-Ublox-M8030-TTL-Level-p-1208588.html?rmmds=search), ist nochmal etwas billiger 😉
Aber leider finde ich wenig Erfahrungen dazu. Haben Sie Erfahrungen mit denen?
Einzigen Unterschied den ich sehe ist der fehlende Kompass, aber Sie schreiben ja, dass ein Kompass bei fixed wing nicht notwendig ist.
Hey Johannes,
dieses GPS habe ich noch nie ausprobiert, sorry!
Gruß,
Phi
I’ve got the exact same PDB, but cannot figure out where to connect the battery to.
It cannot be a free +/- solder pad, because then the output and the input would be on the same side of the circuit (and nothing is regulated)
Please help!
Thanks
Reply in German is ok!
Forgive my stupidity, I mixed up „power“ and „signal“in my thinking proces. the regulated circuit is the signal, not the power..
Solved.
All good mate 🙂 good it works now 🙂
in case of spectrum transmitter / receiver: will „a satellite only“ work ok? Don’t I need a „full“ receiver?
There are some spektrum SAT receivers that are considered full range. So no, not necessarily. But it’s your choice at the end.
Richtig, genau das habe ich doch oben geschrieben 🙂 Baro gibt präzisere Daten aus, aber es ginge auch notfalls ohne. Mag ist überhaupt nicht notwendig.
Ich will nicht Erbsen zählen aber oben steht – Zitat:
„Solltet ihr ein GPS-Modul verwenden wollen, schränkt es die FC-Auswahl etwas ein. Für GPS-basierte Flugmodi benötigt Ihr eine FC mit Barometer.“
Das ist falsch 🙂
Ich würde es nicht empfehlen GPS-Modi ohne einen Baro zu nutzen (eigene Erfahrung) – daher steht es so da. Entweder man macht es richtig oder lässt es eben ganz 🙂
Ist für einen (fixed) wing ein Baro wirklich nötig ? (Sicher ist er nicht von Nachteil, aber iNav funktioniert(e) für wings doch auch ohne Kompass/Baro ?)
Klar funktionier INAV auch ohne Baro – ein Baro ist nur für GPS-Modi wichtig weil „GPS-Altitude“ nicht so genau ist wie die Daten vom Baro
Da haben wir aneinander vorbei geredet – ich meinte mich erinnern zu können dass die GPS Sachen (PosHold, RTH, …) beim Wing auch OHNE Baro (und Kompass) laufen (mit der GPS Höhe – ja ich weiss, die ist nicht so exakt wie Baro) … im Gegensatz zum Kopter wo Baro + Kompass dafür ja zwingend vorausgesetzt werden … ?