
FPV Wing aus Kopter-Teilen bauen mit INAV – Teil 2


Teil2: INAV-Konfiguration und Testflüge
Dieser Artikel wurde von meinem Gast-Autor Albert Kravcov geschrieben. Vielen Dank Albert für diesen Artikel und deine Zeit die du investiert hast!
Inhaltsverzeichnis
Vorwort
Nachdem im ersten Teil ich euch die Verkabelung gezeigt habe, geht es in diesem Teil nun um die wichtigsten Grundeinstellungen von INAV für euren Wing und die ersten Testflüge. Für manche Einstellungen werdet Ihr den Lipo anschließen müssen.

Bitte macht das auf keinen Fall mit einem montierten Propeller!
INAV Configurator
Den INAV Configurator gibt es mittlerweile als Standalone-App für mehrere Betriebssysteme. Damit könnt ihr die INAV-Firmware auf den Flightcontroller flashen und alle Einstellungen treffen.
Hier geht es zum Download. Installiert alle notwendigen Treiber, verbindet den FC mit dem USB-Kabel mit eurem Rechner und klickt auf „Connect“ oben rechts.
Tipp: Das Board blinkt mit einem Fehlercode und unter Umständen piept der Buzzer ständig. Um den Buzzer zum Schweigen zu bringen tippt in dem CLI-Tab den Befehl „beeper -ON_USB“. Anschließend tippt ihr „save“ ein. Das Board startet neu und das Piepen ist Geschichte.
Presets
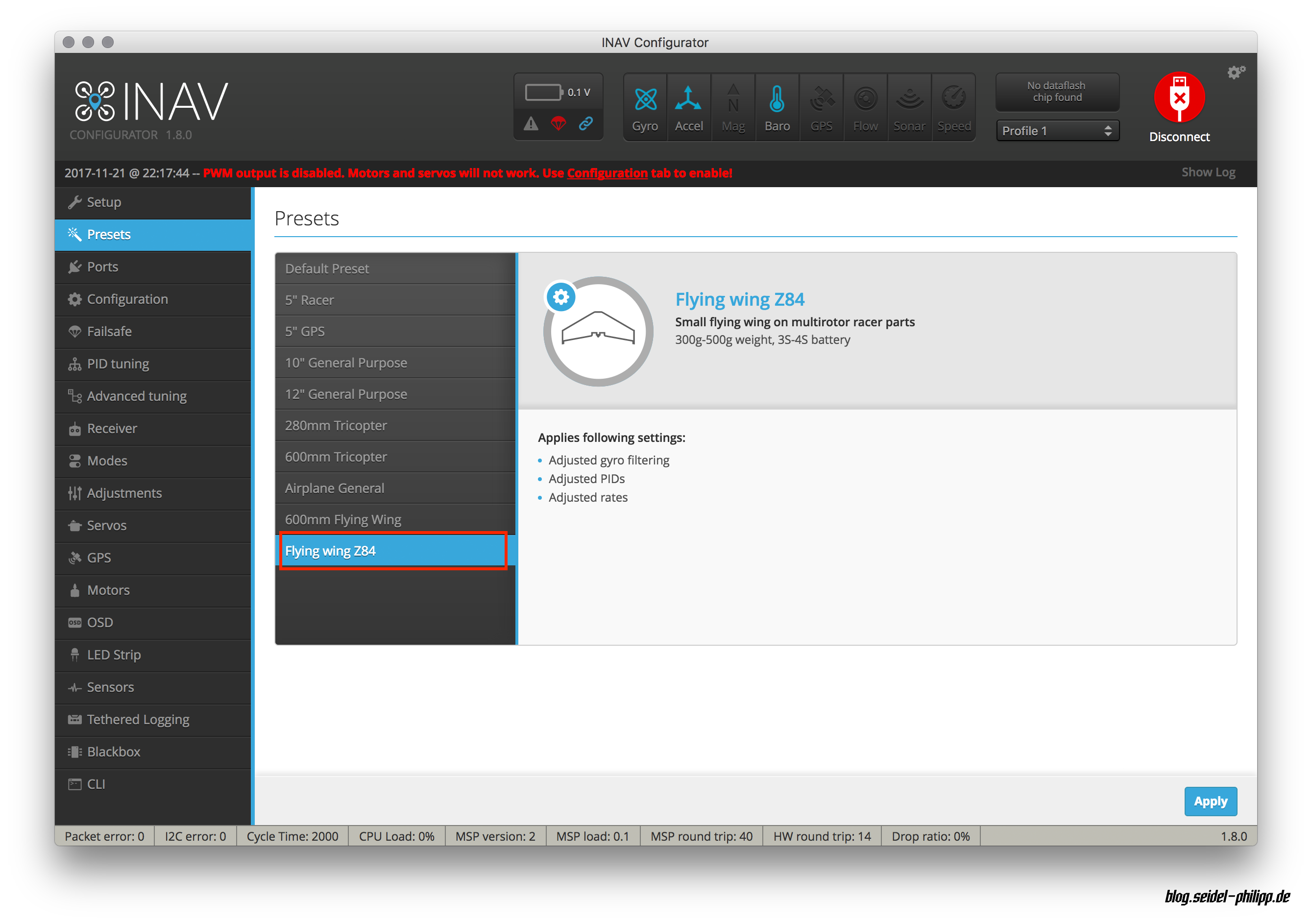
Als allererstes geht in den „Presets-Tab“ und hier wählt ihr das „Flying Wing Z84“ Preset aus. Das stellt schon mal die passenden Rates und Gyro-Einstellungen, die optimal für en Wing dieser Größe sind. Speichern nicht vergessen!
6-Punk ACC-Kalibrierung
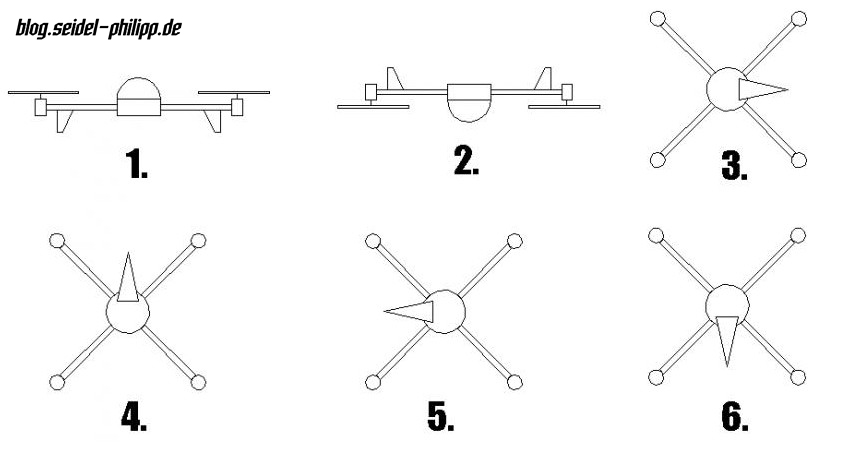
Das ist ein sehr wichtiger Prozess und er unterscheidet sich sehr von der Kalibrierung in Cleanflight/Betaflight. Ganz wichtig ist, dass der PFEIL auf dem Flightcontroller in die Richtung entsprechend der Abbildungen zeigt. Habt ihr das Board (wie in Teil 1 empfohlen) um 90 Grad verdreht eingebaut, müsst ihr hier umdenken! Das Drehen der Board-Ausrichtung im Configurator hat hier keine Auswirkung!
Stellt den Wing in jeweils die auf den Bildern gezeigte Position (entsprechend dem Pfeil auf dem FC) und klickt nach jeder Positionierung jeweils auf den “Calibrate Accelerometer” Button im „Setup-Tab“. Der Wing muss nicht exakt ausgerichtet sein – also keine Wasserwage notwendig. Bei der Rückenposition zwei könnt Ihr den Wing mit den Tragflächen zum Beispiel auf zwei Gläser aufbocken.

Überprüft anschließend im „CLI-Tab“ ob die Kalibrierung erfolgreich war indem ihr folgendes eintippt:
„get accgain_x“
„get accgain_y“
„get accgain_z“
Die Werte sollten nicht 4096 sein.
„get acczero_x“, „get acczero_y“, „get acczero_z“ sollten ebenfalls keine „0“ ergeben.
FC-Ausrichtung
Ist euer Board verdreht eingebaut, solltet Ihn nun im „Configuration-Tab“ unter „Board and Sensor Alignment“ auf der Yaw-Achse -90/90 eingeben und anschließend auf „Save and Reboot“ klicken.
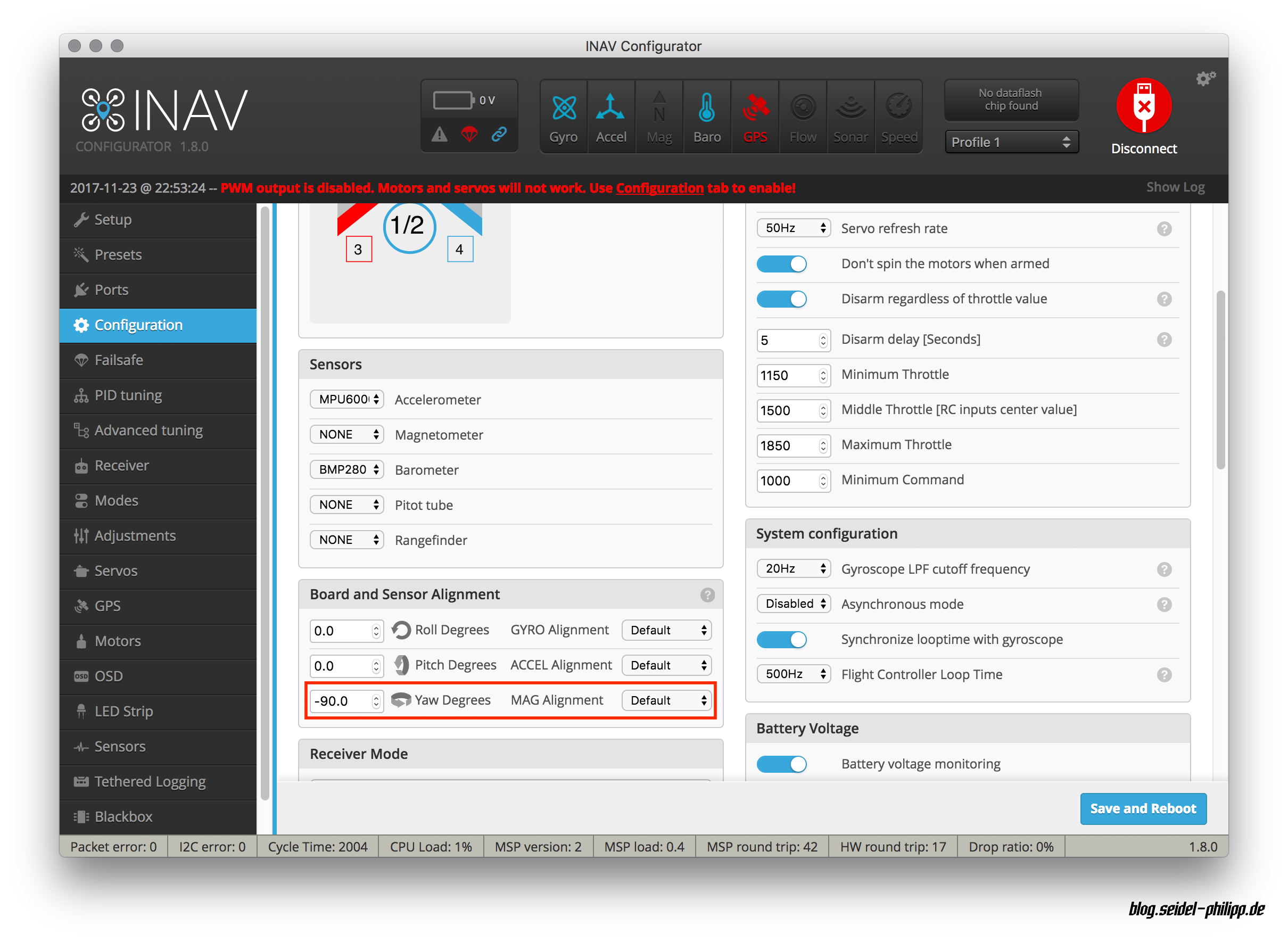
Überprüft die korrekte Lage anschließend in den „Setup-Tab“ indem Ihr die Bewegung des 3D-Modells beobachtet. Sollte alles korrekt sein, dann weiter zum nächsten Schritt.
Tipp: stellt auch die Werte für Roll und Pitch ein – bis im „Setup-Tab“ die Winkelangaben (neben dem 3d-Model) möglichst 0° sind wenn der Wing in Flugposition vor euch liegt. Achtung: Wenn ihr das Board um 90° gedreht habt, sind Roll und Pitch vertauscht!
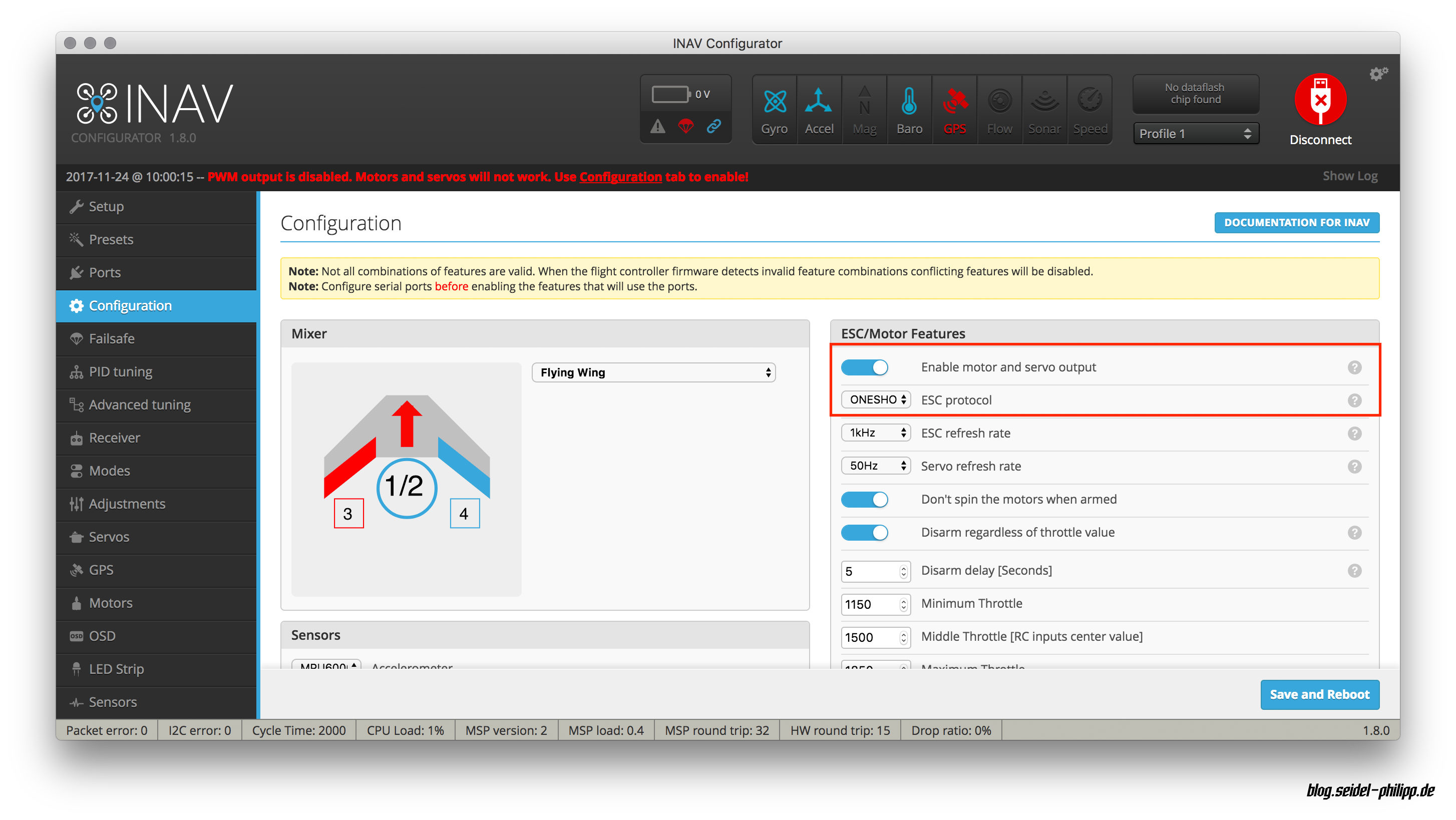
Bleiben wir im „Configuration-Tab“ und aktivieren zunächst die PWM-Ausgabe. Diese ist vorerst deaktiviert, um analoge Servos vor Schaden zu bewahren, falls diese an einen Motor-Pin angeschlossen sind an dem ein ESC erwartet wird. Das ESC-Protokoll stellen wir auf Oneshot.
Wenn ihr möchtet, deaktiviert ihr noch „Disarm regardless of throttle value“. Das verhindert das ungewollte Disarmen in der Luft wenn ihr aus versehen den Arm-Schalter mitten im Flug umlegen solltet – es macht aber das Disarmen im Falle eines Crashes etwas schwieriger, weil Gas immer erst auf 0% stehen muss. Eure Entscheidung!
RX-Settings/Failsafe-Test
Wichtig: INAV übernimmt die Mixer-Funktion des Senders – daher ist es wichtig, dass kein Mixer-Setup in eurem Sender eingerichtet ist.
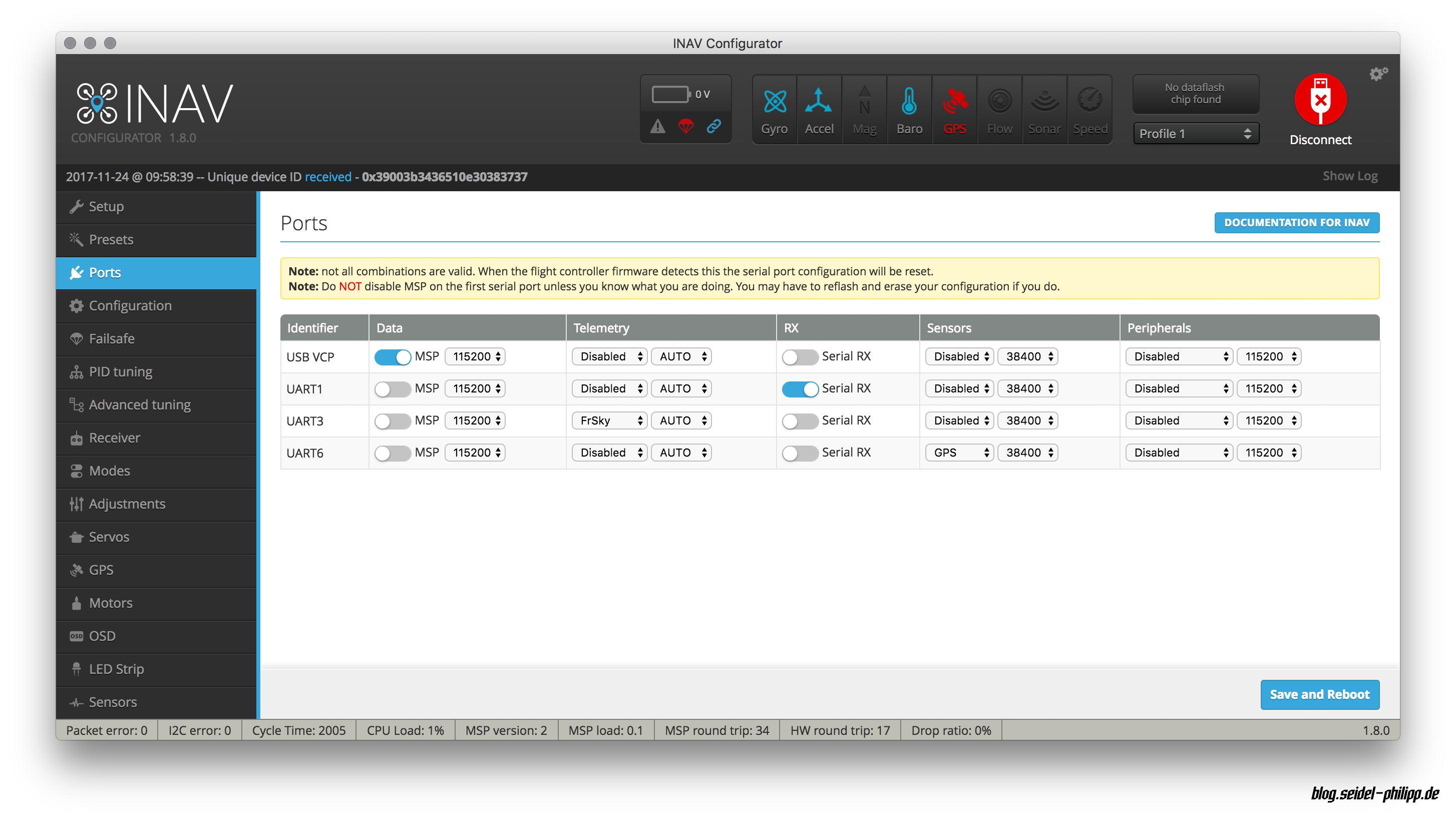
Bevor wir den Empfänger-Typ konfigurieren, sehen wir uns den „Ports-Tab“ an.
In dem Teil 1 dieser Anleitung habe ich mehrere Beispiele gezeigt wie ihr verschiedene Empfänger anschließen könnt. Der Empfänger ist am UART1 angeschlossen. Wir aktivieren „SerialRX“ also am UART1 und falls Ihr noch frsky sPort angeschlossen habt, solltet ihr auf dem UART3 „frsky“ unter „Telemetry“ auswählen (nicht invertiertes sSport-Signal notwendig).
Wo wir gerade in diesem Tab sind: Falls ihr ein GPS-Modul, wie in dem ersten Teil der Anleitung beschrieben, angeschlossen habt, stellt ihr schon mal vorweg auf UART6 „GPS“ unter „Sensors“ ein.
Zurück zum „Configuration-Tab“:
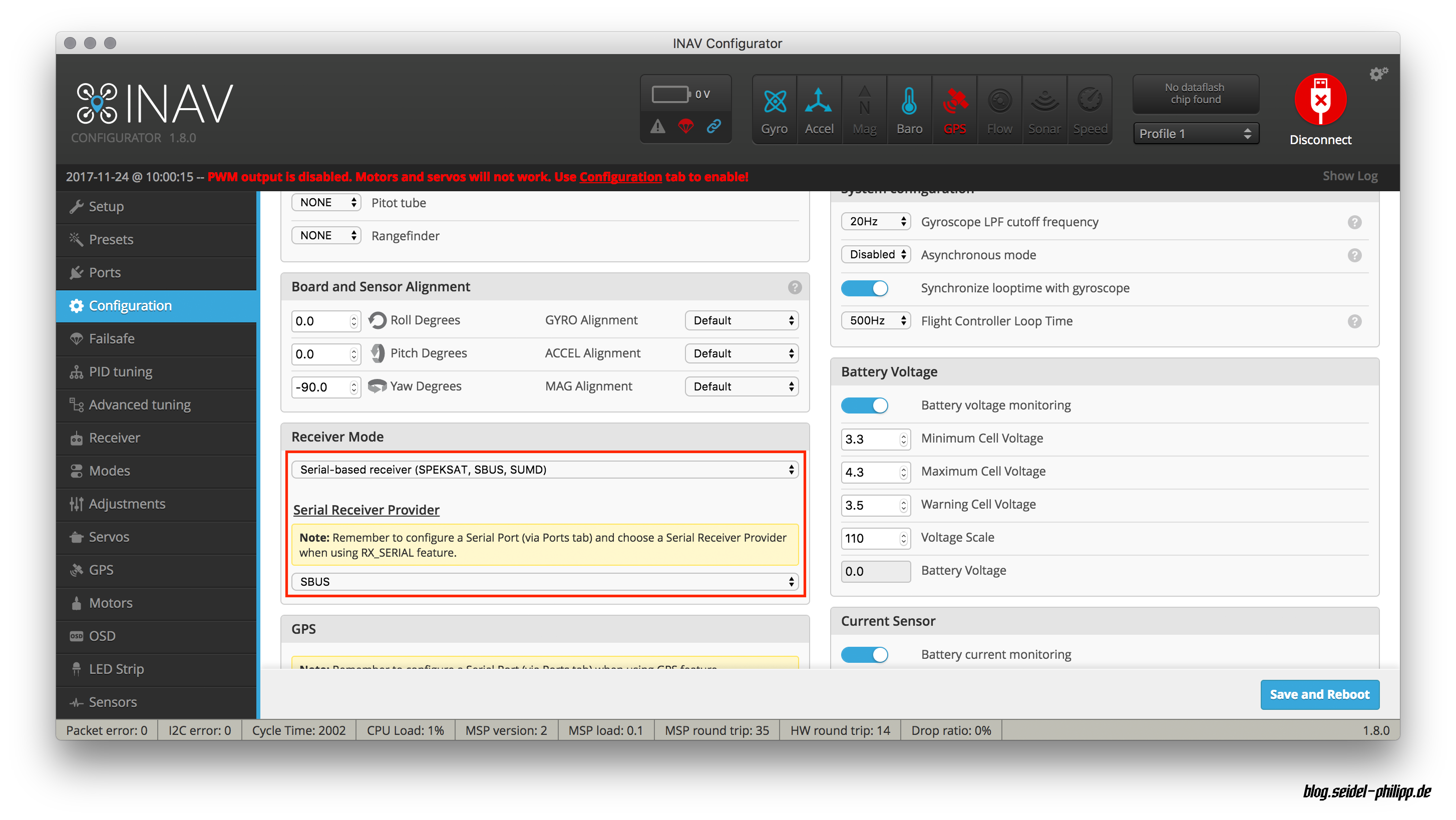
Unter „Receiver Mode“ könnt ihr den Typ auf „Serial-based receiver“ stellen nun euren Receiver-Typ auswählen (SBUS, Crossfire, Spektrum u.s.w.). Nach dem Klick auf „Save and Reboot“ sollte beim erneutem Verbinden die Failsafe-Warnung (oben unter dem Batterie-Icon) nun aus sein.
Solltet ihr den sPort eures Empfängers angeschlossen haben oder einen Chrossfire Receiver verwenden, aktiviert ihr noch zusätzlich „Telemetry“ unter „Features“.
Nach dem Reboot könnt ihr nun in den Telemetrie-Einstellungen eures Senders nach neuen Sensoren suchen.
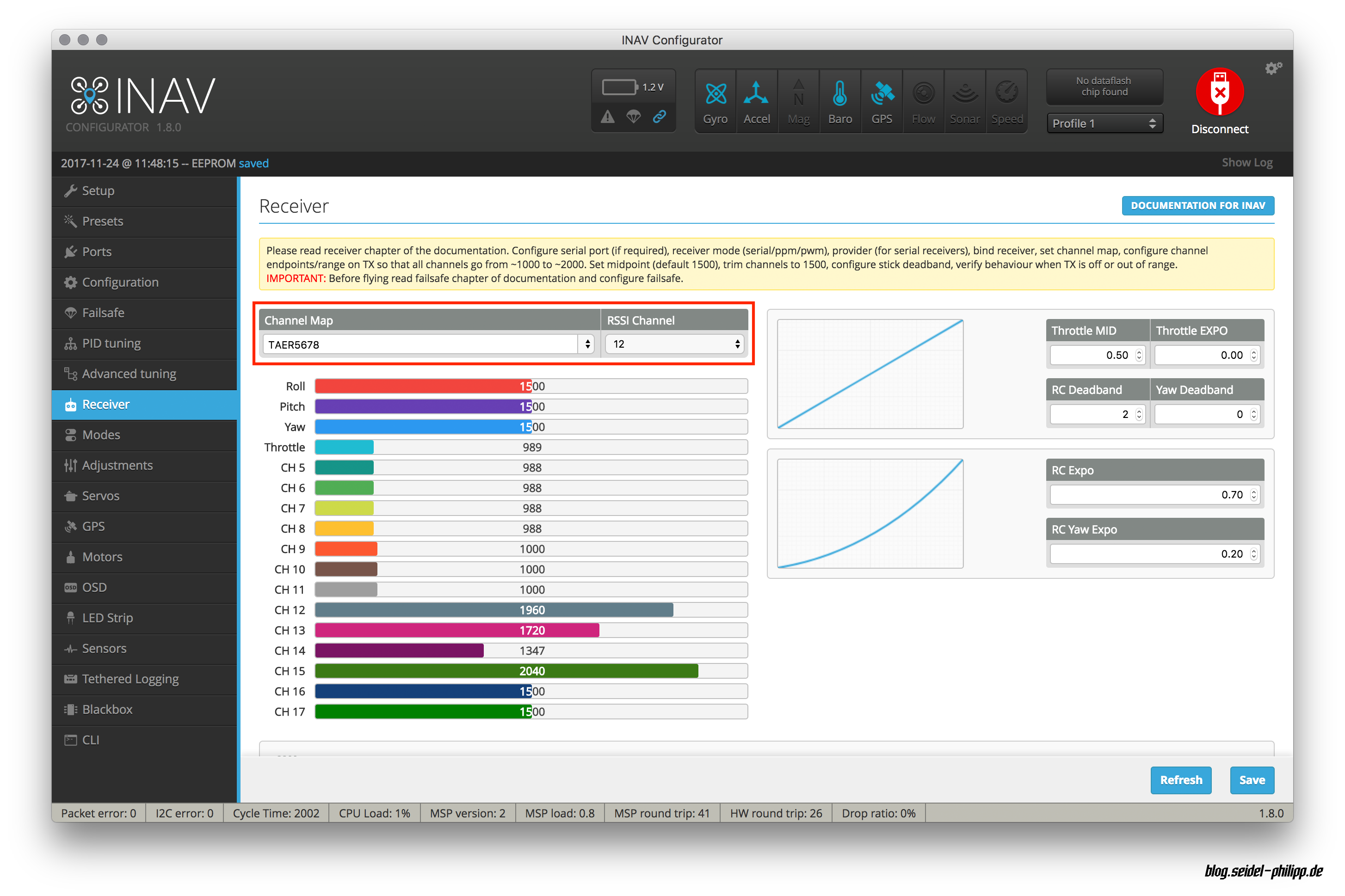
Wir wechseln nun in den „Receiver-Tab“
Überprüft hier ob die Kanal-Ausschläge euren Stickbewegungen entsprechen und ob die Kanalzuordnung korrekt ist. Sehr wahrscheinlich müsst ihr die Channel-Map auf „JR/Spektrum/Graupner“ (TAER5678) stellen damit alles stimmt.
Stellt auch sicher, dass in zentrierter Position der Sticks, alle Werte einen Wert von 1500 haben – falls nicht, passt es in eurem Sender (sub-trim) an. Die Laufwege eurer Sticks sollten sich zwischen 1000 und 2000us bewegen.
Falls ihr einen Receiver verwendet, der auf einem Kanal den RSSI-Wert ausgibt (Crossfire oder XM+), könnt ihr hier den entsprechenden Kanal als Quelle zuordnen.
Failsafe-Einstellungen und Test
Jetzt wo der Receiver funktioniert, solltet ihr als erstes die Failsafe-Einstellungen prüfen und testen ob ein Failsafe von INAV erkannt wird. Im Failsafe-Tab finden sich die Grundeinstellungen:
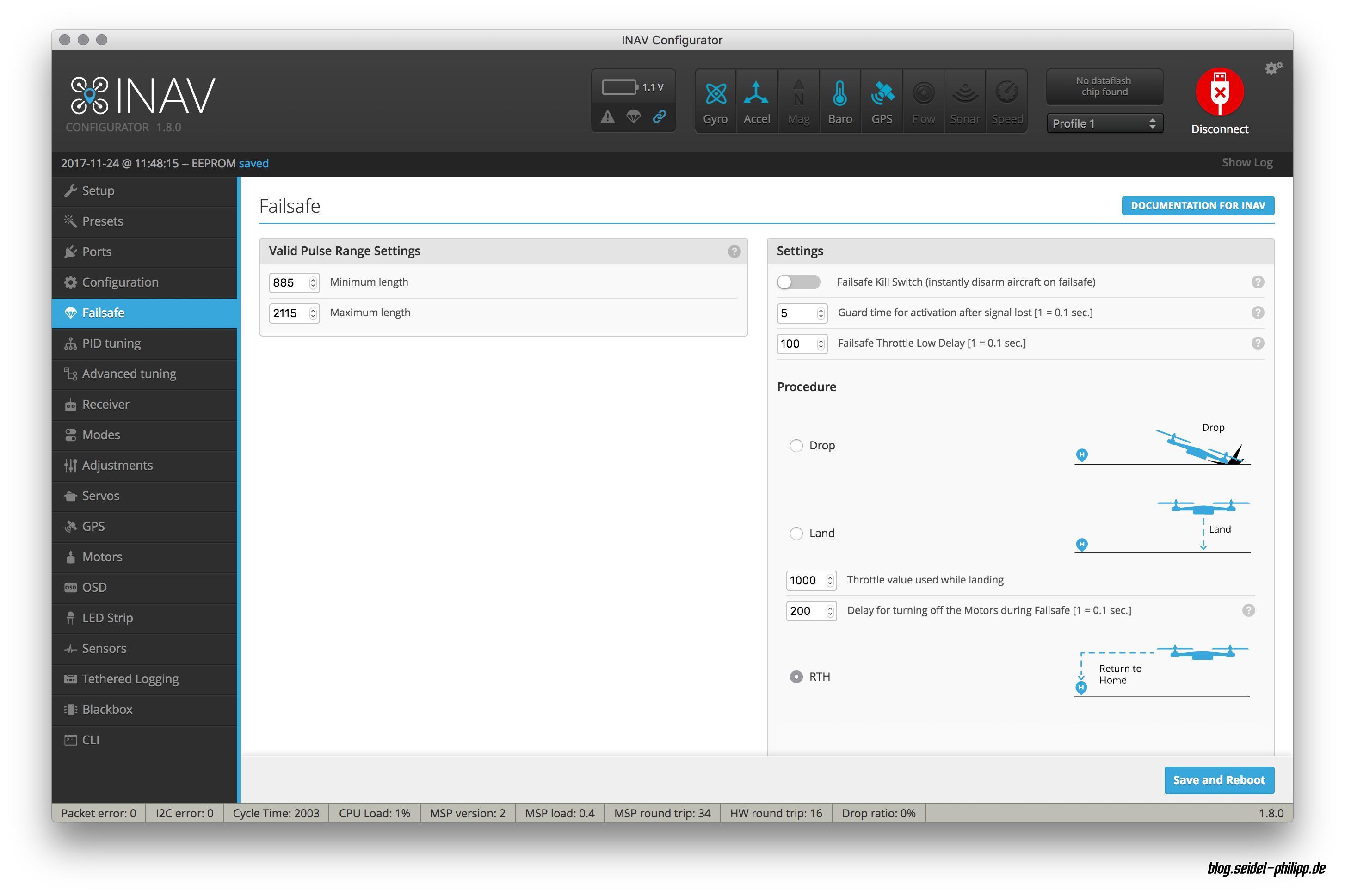
Bitte bringt den Propeller noch nicht an! Schaltet euren Sender ab und beobachtet dabei das Fallschirm-Icon oben in der Statusleiste. Leuchtet es rot auf, dann hat INAV erfolgreich ein Failsafe erkannt. Falls nicht, überprüft im Receiver-Tab auf welche Position der Gaskanal springt wenn ihr euren Sender ausmacht. Es ist wichtig, dass der Wert unter 885us springt. Überprüft eure Failsafe Receiver-Einstellungen im Sender – die Einstellungen sollten – je nach System – auf „No pulses“ oder „CUT“ stehen.
Stellt auch sicher, dass beim Wiedereinschalten des Senders ihr die volle Kontrolle zurück bekommt.
Jetzt könnt ihr entscheiden, was passieren soll falls ihr die Verbindung zum Receiver verliert. Die sicherste Methode ohne GPS wäre hier „Drop“. Mit einem GPS-Modul könnt ihr RTH (Return to Home) wählen. Der Wing fliegt dann bei Verbindungsverlusst autonom zur Startposition zurück bis ihr wieder eine Verbindung habt und INAV eine Stickeingabe registriert.
Erweitere RTH Einstellungen befinden sich im „Advanced tuning-Tab“

Hier könnt ihr das Verhalten bei RTH etwas detaillierter Bestimmen. Return to Home wird übrigens nicht nur bei einen Failsafe aktiv. Bei Bedarf könnt ihr diese Funktion auf einen AUX-Schalter legen den ihr nach Belieben aktivieren könnt. Folgende RTH-Parameter wären für Wings relevant:
| RTH and Landing Settings | |
| At Least
|
Standard-Einstellung. Der Wing klettert auf die definierte Höhe falls er sich gerade tiefer befindet. Falls die Position des Wings höher ist als die definiert RTH Höhe, verbleibt der Wing auf seiner Flughöhe. |
| Current | Definierte RTH-Höhe wird komplett ignoriert. Der Wing tritt immer den Rückweg auf seiner aktuellen Höhe an. |
| Extra | Die definierte RTH-Höhe wird mit der aktuellen Flughöhe addiert. |
| Fixed | Der Wing klettert oder sinkt bis die definierte RTH-Höhe erreicht ist. |
| Max | Definierte RTH-Höhe wird komplett ignoriert. RTH findet in der maximalen Flughöhe des bisherigen Fluges statt. |
| Climb before RTH | Falls aktiv, klettert das Modell erst auf die definierte Höhe und tritt erst dann den Rückweg an. Falls deaktiviert, wird das Model auf die RTH-Höhe steigen während es sich auf dem Rückweg befindet |
| Land after RTH | Never: keine Landung, Wing kreist über Startposition wenn diese erreicht ist. Always: Wing versucht eine autonome Landung bei Erreichen der StartpositionOnly on Failsafe: Landeversuch nur bei einem Failsafe. |
| Min. RTH distance (cm) | Sollte der Wing sich innerhalb des hier definierten Radius befinden, wird kein RTH aktiviert. Ein Landeversuch wird sofort unternommen (falls Landung oben definiert ist). |
| RTH Altitude (cm) | Definiert die Flughöhe für RTH. Empfehlung: 7000 cm |
| RTH abort threshold | Ein Sicherheits-Check der RTH abschaltet und in Notlandung übergeht, falls der Abstand zum Startpunkt währen RTH um diese Angabe steigen sollte. |
| Fixed Wing Einstellungen für autonome Flugmodi | |
| Cruise throttle
|
Gasposition für Reisegeschwindigkeit |
| Min. throttle
|
Minimale Gasposition |
| Max. throttle
|
Maximale Gasposition |
| Max. bank angle
|
Maximaler Neigungswinkel |
| Max. climb angle
|
Maximaler Winkel beim Aufstieg |
| Max. dive angle
|
Maximaler Winkel beim Abstieg |
| Pitch to throttle ratio
|
Formel für die Reduzierung/Steigerung von Gas bei Sinkflug/Kurven. |
| Loiter radius [cm]
|
Radius in cm in dem der Wing bei Position Hold (oder beim Erreichen der Startposition nach RTH) kreist. |
Servo-Einstellung und Test (High Five)
Da der Receiver nun eingerichtet ist und die PWM-Ausgänge aktiv sind. Könnt ihr schon mit dem rechten Stick die Servos bewegen. Die Elevons sollten sich, wie in dem folgenden Video, immer zur Stickrichtung bewegen.
Video zum High Five:
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
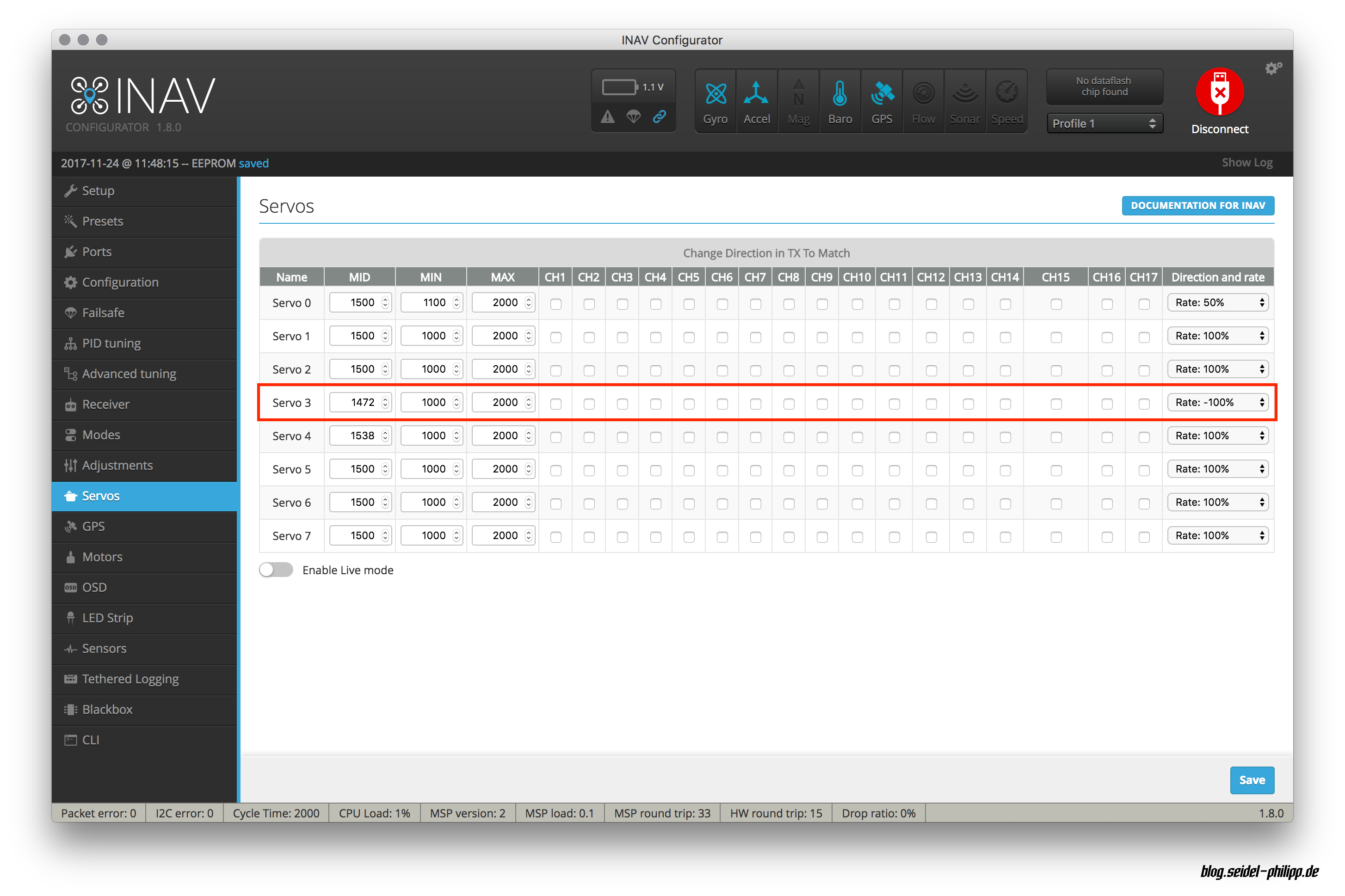
Ein Servo wird sicher genau falsch herum sein, da diese gespiegelt in den Tragflächen verbaut sind. Hier solltet ihr den entsprechenden Servo im „Servo-Tab“ umdrehen, in dem ihr die Richtung von 100% auf -100% umstellt. Überprüft erneut die Bewegungsrichtungen. Wichtig: die Servo-Nummerierung fängt (anders als bei den Motoren) bei 0 an. In meinem Fall muss Servo 3 invertiert werden:
Motordrehrichtung
Der Propeller muss mit der Oberseite (an den Zahlen zu erkennen) in Flugrichtung montiert werden.
Solltet ihr Quad-Propeller benutzen, ist die Motordrehrichtung in diesem Fall eigentlich egal – sucht euch einfach die passenden CW oder CCW Propeller aus der 4er Packung.
Falls ihr APC (oder Ähnliche) Propeller verwendet, ist hier die Drehrichtung entscheidend, da es diese Propeller immer nur mit einer Drehrichtung gibt. Hier könnt Ihr entweder direkt mit dem BlHeli Configurator (https://github.com/blheli-configurator/blheli-configurator) die Drehrichtung ändern oder wahlweise die beiden äußeren Motorkabel am ESC tauschen.
OSD
Das On Screen Display zeigt wichtige Daten zum Status des Lipos, der Empfangsstärke und viele weitere nützliche Informationen an. Ihr könnt die Elemente ganz nach Belieben ein und ausblenden und verschieben. Auch Alarme lassen sich hier definieren.

GPS-Einstellungen
Wir haben zuvor im Ports-Tab bereits einen UART für das GPS-Modul gewählt. Nun kommen noch ergänzende Einstellungen im „Configuration-Tab“ unter „GPS“.
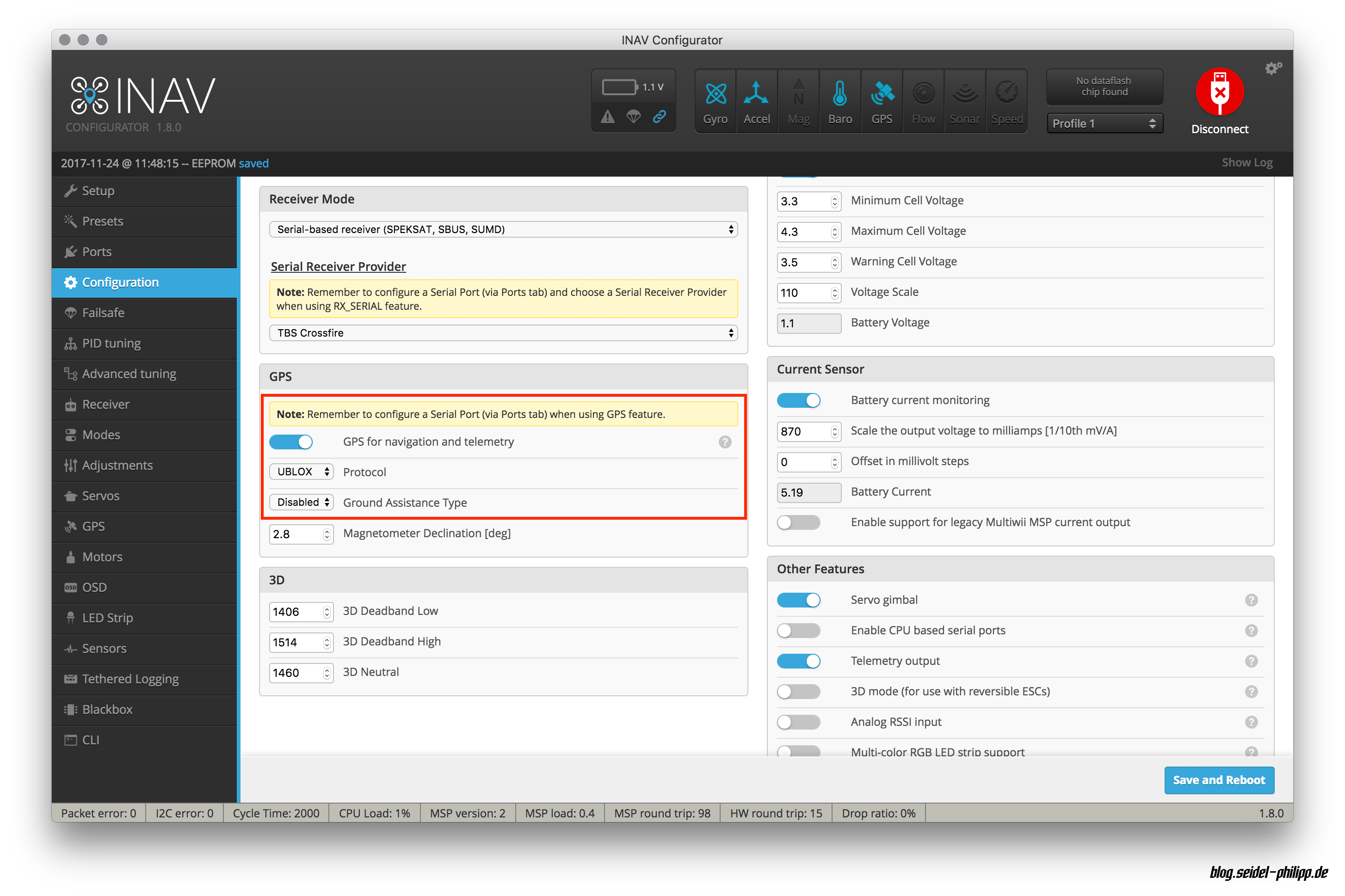
Konfiguriert das GPS wie im Bild oben zu sehen ist. Den Wert für „Magnetometer Declination [deg]“ könnt ihr leer lassen. Sobald diese Einstellungen erfolgt sind und das Board nach dem Speichern neustartet, sollte das GPS-Icon oben in der Statusleiste blau leuchten. Je nach FC müsst ihr eventuell erst einen Lipo anschließen um das GPS mit Strom zu versorgen.
Das GPS benötigt einige Minuten bevor es genügend Satelliten findet. Probiert es möglichst unter dem freien Himmel aus – im Bastel-Keller wird das GPS sehr wahrscheinlich kein Empfang haben. Der Buzzer lässt euch wissen wann genügend Satelliten gefunden sind. Ihr könnt die Anzahl der Sats im „GPS-Tab“ oder im OSD verfolgen.
Tipp: Wenn ein GPS angeschlossen ist, verweigert INAV das Armen so lange, bis ein 3D-Fix durch genügend Satelliten besteht. Diese Sperre könnt ihr im CLI mit „set nav_extra_arming_safety = OFF“ aufheben.
Flightmodes
INAV verfügt über viele Flugmodi´s , mit den ihr die Schalter eures Senders belegen könnt – ich erkläre hier die nur die für den Anfang am Wichtigsten. Hierzu begeben wir uns in den „Modes-Tab“:
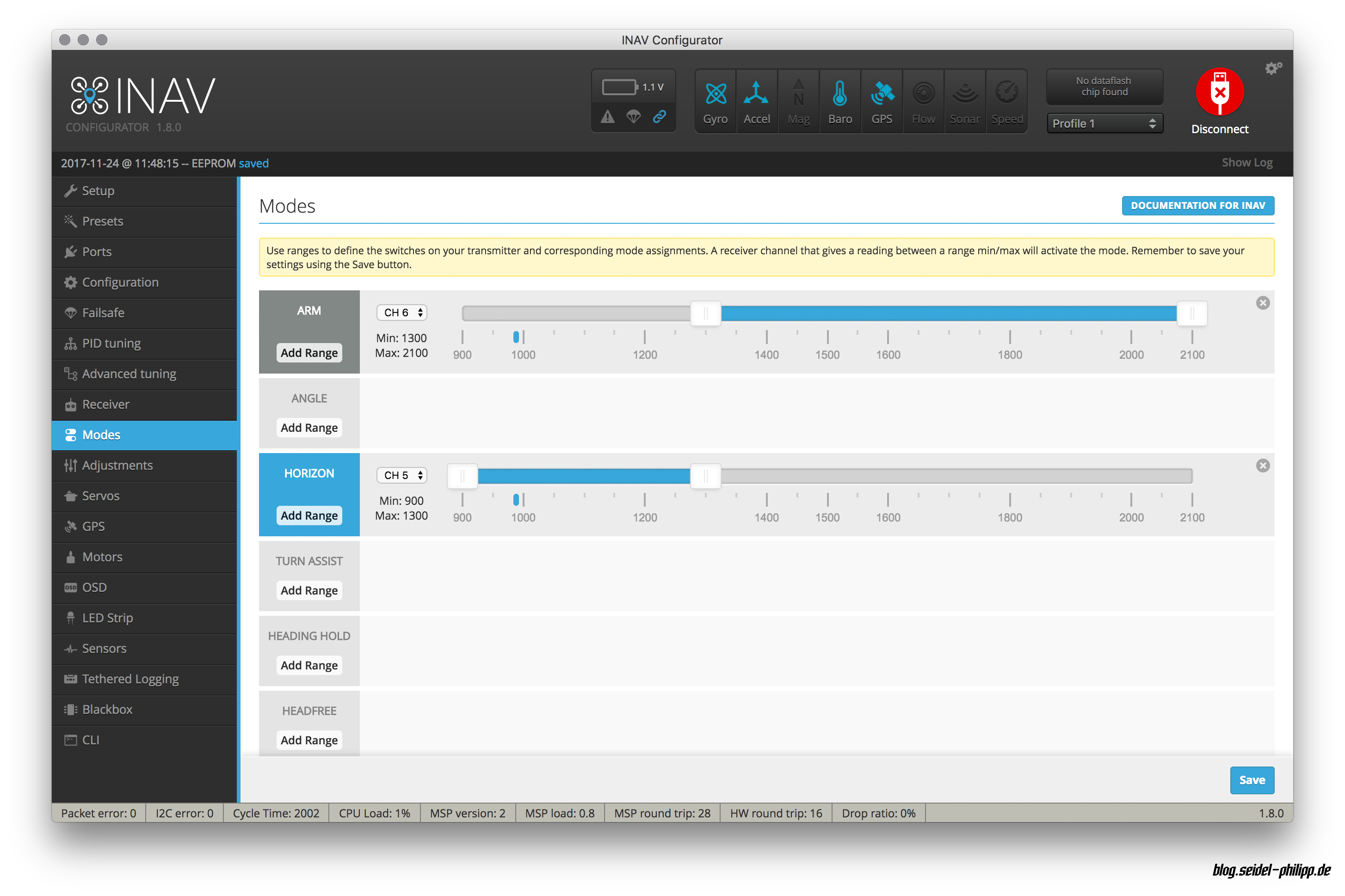
Tipp: Armt auf jeden Fall via Schalter und nicht mit einer Stick-Kombo (https://github.com/iNavFlight/inav/blob/master/docs/assets/images/StickPositions.png) um ein versehentliches Disarmen in der Luft zu vermeiden – das ist bei einem Wing sehr viel wahrscheinlicher als bei einem Quad.
| Flightmodes | |
| ARM | Armt/Disarmt den Wing |
| ACRO (Kein Flugmodus gewählt) | Empfohlener Flugmodus: Der Wing stabilisiert sich nicht selbständig beim Zentrieren des Sticks. |
| ANGLE | Empfohlener Startmodus: Der Wing stabilisiert sich selbstständig und fliegt geradeaus beim Zentrieren des Sticks.
Dieser Modus wird automatisch bei RTH verwendet. |
| PASSTHRU
|
Wing fliegt wie ohne Flightcontroller – nur der Mixer ist aktiv |
| NAV ALTHOLD
|
Wing hält selbstständig die Flughöhe |
| NAV POSHOLD
|
Wing kreist auf der Stelle (mit ALTHOLD kombinieren) |
| NAV RTH
|
Return to Home |
| NAV LAUNCH
|
Startassistent: Erkennt wann ein Wing geworfen wird und startet den Wing automatisch (mehr dazu unten) |
Weitere Einstellungen
Abschließend begeben wir uns in den „PID-Tab“ und stellen für ROLL Rate 360 und PITCH Rate 180 ein.
Dann nur noch ganz unten TPA auf 0% stellen und auf Save klicken.
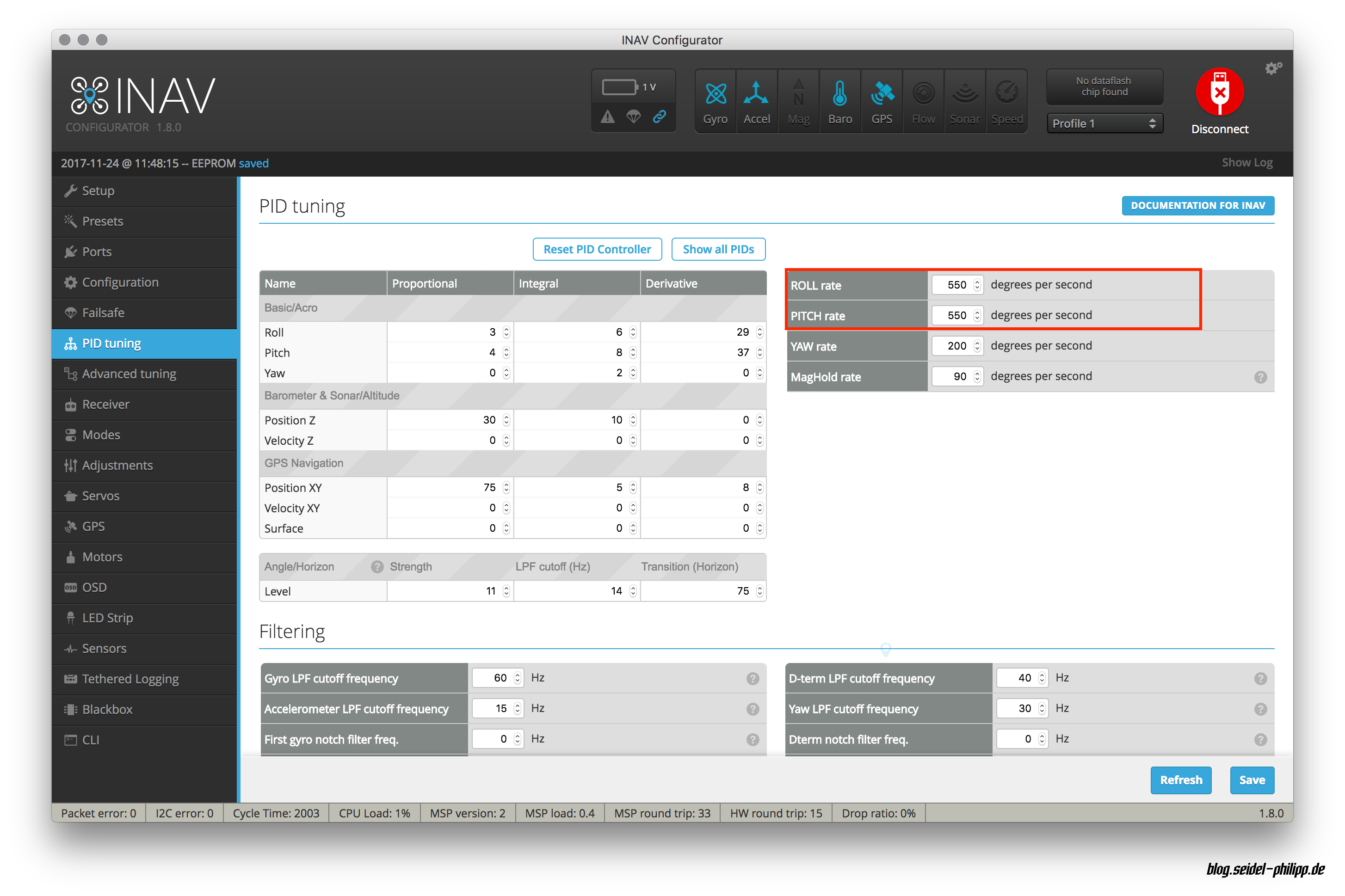
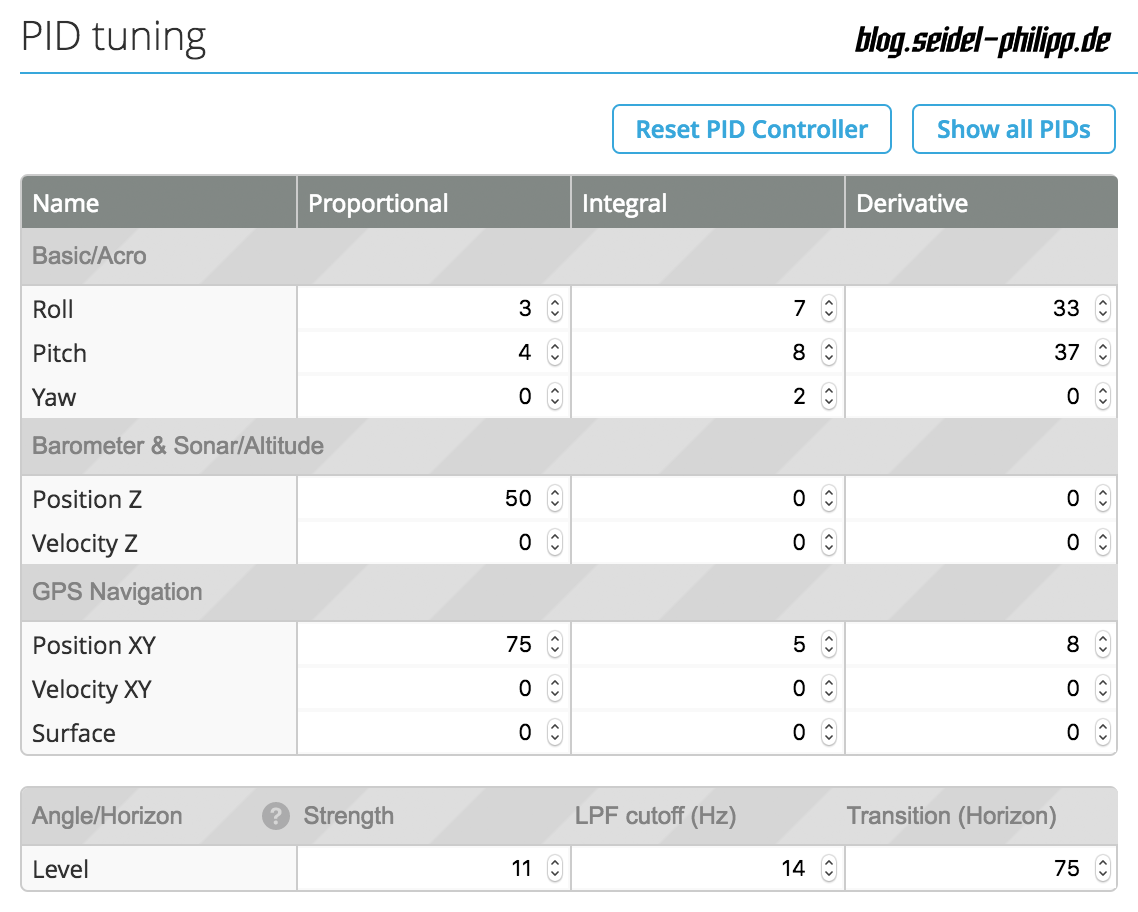
Zur Orientierung hier meine PIFFs von meinem Skyshadow als Ausgangspunkt:
Zuallerletzt müssen wir noch einige Einstellungen in das CLI eingeben, da es im Configurator keine Felder dafür gibt.
| CLI Befehle | |
| set max_angle_inclination_rll = 600 | Max. Winkel für Roll im stabilisierten (Angle) Flugmodus |
| set max_angle_inclination_pit = 600 | Max. Winkel für Pitch im stabilisierten (Angle) Flugmodus |
| set small_angle = 180
|
Ermöglicht das Armen in jeder Position |
| set failsafe_throttle_low_delay = 0
|
Für Gleiter wichtig: Standardmäßig geht INAV in den Failsafe wenn Gas im Flug mehr als 10 Sekunden auf 0 stehen sollte. Mit diesem Befehl könnt ihr das deaktivieren. |

Damit wären wir mit der anfänglichen Konfiguration fertig! Alle Preflight-Checks sollten im „Setup-Tab“ nun Grün sein. Nun geht es zum Spannenden praktischen Teil.
Übrigens: Das INAV-Wiki ist super ausgearbeitet und wirklich empfehlenswert falls Ihr euer Wissen vertiefen möchtet.
Das Wiki findet ihr hier: https://github.com/iNavFlight/inav/wiki
Alle CLI-Befehle hier: https://github.com/iNavFlight/inav/blob/master/docs/Cli.md
Erster Wurftest
Bevor es nun aufregend wird, fangen wir ganz sachte an. Geht mit eurem voll beladenen Wing raus und sucht möglichst eine Wiese mit etwas höherem Gras. Nun werft den Wing wie ein Papierflugzeug möglichst gerade. Es sollte segelnd mit dem Bauch aufkommen. Ist es nicht der Fall, überprüft bitte das CoG (Center of Gravity).
Tipp: Checkt vor jedem Flug die Funktion der Servos. Sitzen die Servos immer noch fest? Hat sich der Propeller gelockert? Überprüft die Motorhalterung.
Wurftechnik
Bevor ihr den ersten Flug antretet, solltet ihr euch Gedanken machen wie ihr den Wing starten möchtet. Hier ein Video zu Wurftechniken.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Tipp: Startet immer im Angle-Mode (alternativ auch mit NAV Launch). So hält sich der Wing ganz selbstständig gerade in der Luft und ihr könnt (wenn ihr etwas Höhe gewonnen habt) ganz relaxed eure FPV-Brille aufsetzen.
Flug1 (Passthrough)
Der erste Wing-Flug ist Adrenalin pur – zumindest haben meine Hände damals ganz schön gezittert. Bereitet euch darauf vor, dass ihr nicht gleich beim ersten Wurf in der Luft seid und ein paar Mal ins „Gras beißt“ bevor der Start klappt. Startet im ANGLE Mode. Sobald ihr in der Luft seid könnt ihr auf ACRO umschalten. Fliegt ganz gemütlich ein paar Runden, werdet mit dem Wing etwas vertraut. Es kann sein, dass der Flug etwas wackelig verläuft und der Wing driftet.
Schaltet nun in den PASSTHRU Mode und beobachtet ganz genau wie der Wing sich verhält. Kippte er mit der Nase weg? (CoG oder Reflex-Problem). Driftet er in eine bestimmte Richtung? (Elevons stehen nicht gleich gerade/CoG/Drag).
Hat sich der Wing im PASSTHRU irgendwie auffällig gezeigt, versucht die Probleme am Boden zu lösen, bis der Wing in diesem Modus sich ok fliegen lässt.
Flug2 (Servo-Autotrim)
Beim zweiten Flug kümmern wir uns um die Elevons. Hierfür müsst ihr dem Mode SERVO AUTOTRIM auf einen Schalter legen. Aktiviert den Schalter im Flug während ihr versucht so gerade wie möglich zu fliegen. In 5 Sekunden ermittelt der Mode die beste Mittelpunkt-Servoposition aus den Durchschnittswerten.
Sollte euch der neue Wert nicht gefallen, einfach den Mode wieder deaktivieren und von vorne anfangen.
Sollten die neuen werte passen, deaktiviert SERVO AUTOTRIM nicht! Landet und disarmed den Wing – erst jetzt werden die neuen Werte gespeichert und ihr könnt den Mode deaktivieren.
Flug3 (Board-Alignment)
Den dritten Flug verbringt ihr komplett im ANGLE Mode und beobachtet ob der Wing ohne Eingabe des rechten Sticks gerade fliegt. Sollte das nicht der Fall sein, solltet Ihr im „Configuration-Tab“ unter „Board and sensor alignment“ die pitch/roll Achse entsprechend gegentrimmen bis der Wing im ANGL Mode geradeaus fliegt ohne groß abzusinken oder zu steigen.
Flug4 (Autotune)
Um die passenden PIDs (PIFF) für euren Wing zu finden, empfehle ich euch Autotune durchzuführen. Hierfür legt ihr den AUTOTUNE Mode auf einen Schalter und aktiviert diesen im Flug sobald ihr Höhe gewonnen habt.
Es könnte sein, dass der Wing sich am Anfang sehr schwammig anfühlt. Führt schnelle und maximale Stickbewegungen aus. Erst auf einer Achse dann auf der Anderen. Alle 5 Sekunden werden neuen Werte für den PIFF Controller errechnet. Je länger ihr das macht, desto besser wird es.
Wenn ihr zufrieden sein solltet, schaltet ihr AUTOTUNE ab – die Werte werden zwischengespeichert, aber noch nicht endgültig!
Auf keinen Fall mit aktivem AUTOTUNE landen, da falsche Werte ermittelt werden.
Nach der Landung bitte erst disarmen und dann per Stick-Combo die Werte speichern – Beide Sticks maximal nach unten und nach außen drücken.
Tipp: Sollte der Wing immer noch etwas zu stark auf einer Achse wackeln, solltet ihr „P“ für diese Achse schrittweise erhöhen.
Flug5 (GPS Test)
Beim letzten Testflug testen wir die GPS Modi. Hierfür benötigen wir NAV POSHOLD+NAV ALTHOLD und NAV RTH jeweils auf einer Schalterposition.
Sucht euch eine große überblickbare Fläche für diesen Test. 3D GPS-Fix mit genügend Satelliten (8+) ist Voraussetzung.
https://www.youtube.com/watch?v=34IzxC25eRo
Startet und gewinnt an Höhe. Aktiviert zunächst POSHOLD zusammen mit ALTHOLD und ihr solltet beobachten wie der Wing an der letzten Position seine Kreise zieht. Sollte das zuverlässig funktioniert haben, können wir uns an den RTH-Test wagen.
Fliegt ein gutes Stück von euch weg und aktiviert RTH. Der Wing sollte drehen und sich so verhalten wie ihr es in den RTH-Einstellungen definiert hattet.
Wenn ihr seht, dass der Wing über euch kreist oder zur euch zurückkommt – hat RTH funktioniert. Ihr könnt jederzeit mit Stick-Inputs eingreifen oder den Mode deaktivieren, falls sich der Wing merkwürdig verhalten sollte.
Von der automatischen Landung rate ich euch ab – die sollte der Wing nur in einem Notfall selbstständig versuchen.
Current Sensor Kalibrierung
Es ist recht einfach den Current Sensor zuverlässig zu kalibrieren damit dieser korrekte Werte ausgibt. Dafür benötigt ihr lediglich einen Testflug und ein Ladegerät.
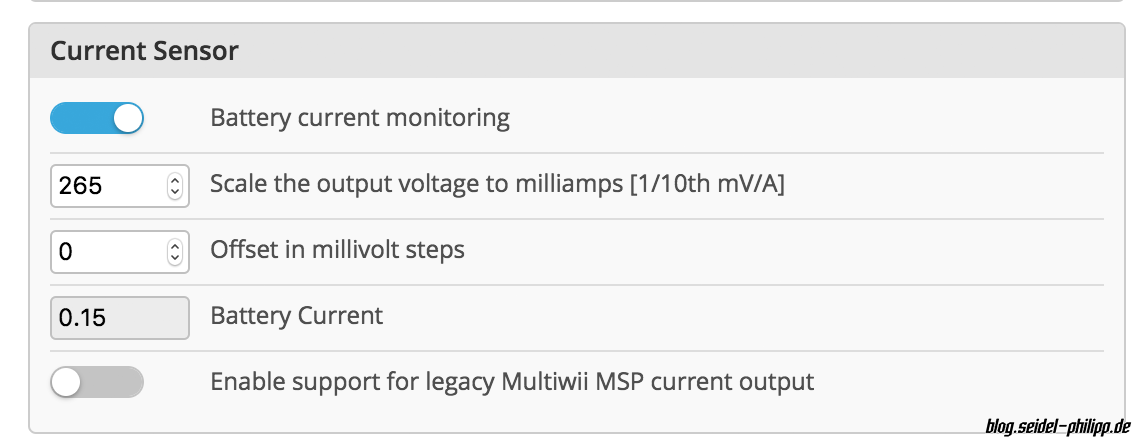
- Fliegt einen voll geladenen Lipo leer und notiert euch den mAh Wert des OSDs. = A
- Zu Hause angekommen ladet ihr den Lipo wieder voll und notiert euch die geladene mAh = B
- Notiert euch die aktuelle Current Scale von INAV (in dem Bild oben 265) = C
Die Formale lautet: (A/B)*C = neuer Wert für „Current Scale“.
NAV LAUNCH
Wie oben erwähnt kann dieser Mode automatisch euren Wing starten, wenn der Wing in einem bestimmten Winkel geworfen wird. Für einen Autolaunch müsstet ihr so vorgehen:
- NAV Launch Mode durch einen Schalter aktivieren
- ARM durch einen Schalter aktivieren (Buzzer-Piepen ertönt regelmäßig)
- Sicherstellen, dass der Motor keine Gasbewegungen annimmt
- Gas-Stick etwa in die Mitte positionieren
- Wing möglichst gerade werfen
- Motor wird starten sobald der Wurf erkannt wurde und der Wing steigt stabilisiert
- Nach 5 Sek. wird Autolaunch automatisch abgebrochen und die Kontrolle übergeben oder sobald ein Stick-Input durch INAV registriert wird.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Einige wichtige CLI-Einstellungen (es gibt noch mehr) müsstet Ihr für die Benutzung wissen:
nav_fw_launch_max_angle: 45 – Gibt den maximalen Wurfwinkel an in dem ein Launch erkannt wird. Winkel= Roll-Winkel+Pitch-Winkel. Wird dieser Winkel überschritten wird Autolaunch abgebrochen.
nav_fw_launch_thr = 1700 – Gasposition beim Autostart
nav_fw_launch_motor_delay = 500 Zeitspanne (ms) zwischen Wurferkennung und Motorstart
nav_fw_launch_timeout = 5000 – Zeitspanne (ms) nach der Autolaunch abgebrochen wird
nav_fw_launch_climb_angle = 18 – Steigewinkel in Grad
Und nun das Wichtigste: Have fun!

Hi Phil
Habe dieses Wochenende in meinen Wing die Dji Air Unit eingebaut. Leider bekomme ich kein OSD angezeigt. Hast du dafür eine Lösung?
Schöne Grüße
Hast du dein OSD in der AirUnit auch aktiviert?
Hey Phil,
super Anleitung, vielen Dank. Ich habe alles soweit eingerichtet und im Trockenen funktioniert alles bis auf das Arming. Ich hab nav_extra_arming_safety = OFF schon gemacht aber ich verzweifele langsam. Ich versuche seit 2 Tagen den Motor zum laufen zu bringen aber
er will einfach nicht. Draußen selbst mit 12 Sat. nicht. Weder Dshot noch Standard, nichts will funktionieren.
Alles andere scheint super zu funktionieren, wenn ich den Wing in der Hand habe und ihn bewege, gleicht der FC alles aus.
Ich hoffe du kannst mir aus der Ferne helfen.
Gruß Stefan
Hi Phil,
wie gewünscht hier mal meine bisherigen Erfahrungen:
Habe inzwischen 2 Copter mit INAV gebaut. Den ersten mit 7″ 3Blatt, 3s LIPO und 750g Abfluggewicht und diesem FC:
https://www.banggood.com/de/BF3_1_5-Omnibus-F4-V2-Flight-Controller-STM32-F405-MCU-Integrated-OSD-Built-in-5V-BEC-Current-Meter-p-1143258.html?rmmds=myorder&cur_warehouse=CN
Den zweiten mit 5×3″ 2Blatt, 2s LIPO, 250g Abfluggewicht und diesem FC:
https://www.banggood.com/de/BF3_1_5-Omnibus-F4-V2-Flight-Controller-STM32-F405-MCU-Integrated-OSD-Built-in-5V-BEC-Current-Meter-p-1143258.html?rmmds=myorder&cur_warehouse=CN
Der erste Copter fliegt so weit ganz gut, allerdings hatte ich nun schon 2 mal einen Absturz trotz programmiertem Failsafe (Der Copter sollte dann normalerweise auf RTH gehen). RTH per Schalter und per Sender ausschalten funktioniert gut. Ich habe null Ahnung weshalb der Copter abgeschmiert ist! Ich hatte den Flug per DVR in der Videobrille aufgezeichnet und anhand der GPS Koordinaten auch wiedergefunden. Im Video macht der Copter eine saubere Rolle nach vorne und stürzt dann ab. (kein ausbrechen nach rechts oder links während der Rolle). Dummerweise bin ich im Horizon Mode geflogen und kann daher nicht 100% ig genau sagen, ob ich den Nick-Knüppel nicht etwas zu weit durchgedrückt habe, ich bin aber der Meinung, dass dies nicht der Fall war, da ich bei beiden Abstürzen ziemlich langsam Unterwegs war! Nun fliege ich sicherheitshalber nur noch im Angle Mode. Kann es sein, dass sich die CPU im FC „verschluckt“ hat? Irgendwie habe ich kein vertrauen mehr in die China FC’s. Wo bekommt man denn einen originalen Omnibus F4 V2?
Zu dem 250g Copter mit Matek F405 STD FC kann ich folgendes berichten:
Es war unvorstellbar schwierig die PID’s einzustellen! Die Werte stehen nun ganz niedrig und das Fenster, in dem der Copter einigermaßen vernünftig fliegt ist seeehr klein! Trotzdem wackelt der Copter noch ziemlich stark. Bei RTH z.B. beschleunigt er, bremst ab, beschleunigt, bremst ab, usw… Verändere ich nun P nur um 1 oder 2 Punkte nach oben oder unten, so verschlechtert sich das Flugverhalten drastisch! (Copter schwingt sich auf). Also, entweder ich habe eine Einstellung noch nicht gefunden, die dieses hypersensible Verhalten dämpft, oder der verbaute Gyro ist tatsächlich deutlich schlechter als ein MPU6000. (Der MPU6000 soll wohl für unsere Anwendung im FC am besten geeignet sein).
Ps.: Ich schreibe meine Erfahrung hier, weil ich bis heute nicht wirklich ein deutsches Forum gefunden habe, in dem erfahrene INAV User unterwegs sind. Scheint wohl noch nicht so viele Leute zu geben, die sich mit INAV beschäftigen!?
BG, Elton
Hey Elton,
danke für deine Erfahrungen! Originale Omnibus FCs bekommst du bei http://www.flyingmachines.de
Gruß,
Phil
Moin
Klasse Anleitung ich Bau mir grade den Caipirinna 2 mit der F35 Flightcontrol jetzt bin ich eigentlich fertig nur müsste ich die Servo Wege noch etwas begrenzen.
Aber in der INAV Software ist der Tab für Servo bei mir leer genauso wie der Mixer Tab und ich versteh nicht wieso da nichts anzeigt wird vielleicht hast du einen Tipp für mich?
Hallo Philipp, ich muss bei der FrSky qx7 bei der Modelerstellung das Quad auswählen oder das Flugzeug?
Vielen Dank für das super gute Tutorial, finde es echt Klasse das du dir die Mühe machst uns zu helfen.
Das würde ich auch gerne wissen, denn das stehtleider nirgendwo…. 🙁
hey Norbi und Martin,
ich lege immer komplett unkonfigurierte Modelle an. Das heißt ich wähle nichts aus indem ich die „Back“ Taste drücke, wenn man in dem besagten Menü ist.
Man könnte Quad auswählen, aber in keinem Fall „Flugzeug“ denn dann würde die Funke einen Mixer erstellen. Da wir INAV verwenden, wird kein Mixer in der Funke benötigt, da das alles die Flugsteuerung intern macht.
Gruß,
Phil
Klasse anleitung. Funktioniert so weit prima. Aber RTH funktioniert nicht. Ich bin ein Stück weggeflogen und habe auf RTH geschaltet. Der Wing hat dann sehr schnell Höhe verloren und wollte nicht zurück. Er hat dann auch nicht auf meine Stick Inputs reagiert. Geendet ist das mit einem Crash. Was könnte da falsch gelaufen sein? Jemand schonmal so ein Problem gehabt?
Hi Thomas, mir ist heute genau das gleiche passiert aber ohne Absturz. Außerdem auch bei einer relativ engen Kurve mit wenig Gas. Ich habe normale BL Drehzahlsteller verbaut. Mir kam eben die Idee, dass ein oder mehrere Drehzahlsteller vieleicht in den Bereich kamen, wo sie abschalten. Könnte das vieleicht an dem Schalter in INAV liegen: Dont spin the motors when armed? Ich glaube ich hatte den aktiviert. Muss ich morgen noch mal nachschauen. Außerdem laufen die Motoren beim Start ziemlich spät an und auch unterschiedlich. Ist das normal (weil der Copter vieleicht etwas schräg steht)?
BG, Elton
Der Motor hat nicht abgeschaltet. Ich habs ja im Wing verbaut.
Hier mal ein Zwischenbericht: Wie ich bereits geschrieben hatte, habe ich mir 2 FC’s bestellt. Offenbar beide für die Katz, da ich schlicht und einfach einen UART zu wenig zur Verfügung habe. Für die Telemetrie reicht es nicht mehr. Diese möchte ich aber auf jeden Fall haben, da mir dann bei weiteren Strecken eine Akkuwarnung ausgegeben wird. Vieleicht leitet INAV dann sogar RTH automatisch ein? Nun ja, jetzt suche ich erst mal einen besseren FC mit mindestens 4 UART’s. Welchen FC verwendet ihr denn so (mit GPS und Telemetrie)?
BG, Elton
Du kannst noch Softserial einsetzen für einen vierten UART
Danke Martin! Allerdings habe ich nur eine Anleitung für Betaflight gefunden. Die ist ziemlich lang und nur auf Englisch. Gibts da auch ne Anleitung für INAV?
Im Config Tab unter features enable cpu based port, dann bekommst du einen weiteren UART im Ports Tab
hallo
gute tutorial hat mir bei vielen sachen geholfen
aber wie ist das mit der funke ? einfach ein normales copter modell erstellen ?
und wie muss das mit den servos genau ? hab nur im passthru/manual mode volle ausschläge im acro(wenn ich kein modus auswähle) oder im angle hab ich über roll deutlich weniger als über pitch und beides deutlich weniger als im passtrhu/manual mode
Die Funke sollte ganz normal auf Kopter-Konfiguration stehen (keine Mixer aktiv). Das mit den Ausschlägen ist völlig normal.
wenn ich ein neues modell anlege hab ich ja keine mixer bis auf die schalter die ich mir dazu einstelle (bei der qx7 )
war vorhin kurz nen testflug machen aber war kaum zu steuern und stürzte direkt ab
ist auch mein erster wing deswegen dachte ich das es an den servo ausschlägen lag
hättest du da einen tipp ?
Hallo, Phil.
Müßte der Tipp “ Das Board blinkt mit einem Fehlercode und unter Umständen piept der Buzzer ständig. Um den Buzzer zum Schweigen zu bringen tippt in dem CLI-Tab den Befehl „beeper -ON_USB“. Anschließend tippt ihr „save“ ein. Das Board startet neu und das Piepen ist Geschichte.“ im 2.Teil nicht „beeper -OFF_USB“ lauten?
Bei Deinen bezeichneten Flüge 2 und 4,nach dem Absatz „Wurftechnik“, fliegt man im ACRO-Modus und schaltet dann Servo-Autotrim oder Autotune zu? Oder in welchem Mode werden beide Trim-/Tune-Modes geflogen?
Gutes Beginner-Manual. Toll gemacht.
Danke vorab, für Deine Auskünfte.
Hallo Philipp,
mein S800 mit Omnibus F4 Pro ist soweit fertig und anhand Deiner tollen Anleitung konnte ich alles konfigurieren. Allerdings bin ich mir in zwei Punkten unsicher: 1.) die Servowege sind minimal. Bei Vollausschlag des Stick von einer Seite auf die andere Seite drehen die Servos ~90°. Das erscheint mir sehr wenig. 2.) ich habe eine deutliche Latenz zwischen Stickbewegungen am Sender und den Servo’s geschätzt sind es etwa 0.5 sec. Die Kanal-Ausschläge (1000 – 1500 – 2000) sind genau mit den Stickbewegungen abgestimmt. Sender Taranis X7S Empfänger XSR/LBT. Ist das so normal ?
Vielen Dank für Hinweise aller Art
Hi Philipp,
mit v1.9 wurde der Passthrough Mode in Manual Mode umbenannt, vllt. kannst du das für Neueinsteiger noch dazuschreiben 🙂
Stimmt, werde ich bei Zeiten mal ändern!
Hi Phil,
erstmal ein riesen Lob für diesen Blog (endlich mal schnell auf deutsch was nachlesen :D), der gefällt mir super und ist auch schon geliked…
Allerdings bin ich auf dem Gebiet Einsteiger und hab ein paar Fragen die ich bisher nicht nachlesen konnte. vielleicht kannst Du mir da ja weiter helfen:
1. Falls du beide Wings schon geflogen bist, würdest einem Anfänger auch den AR Wing empfehlen? Wenn der stabiler fliegt, ist das vielleicht gar nicht so verkehrt 😉
2: Welche Motor / Prop / Lipo Kombination würdest Du einem Einsteiger empfehlen wenn man so 20 / 30min (S800 / AR) Flugzeit anpeilt, aber auch mal Rollen oder Loopings machen will? Oder ist das eher ein Fall für das Speed Setup? Bzw. was für Geschwindigkeiten versteht man denn grob unter Speed / Endurance?
3. Bezieht sich auf die 70m RTH-Höhe auf die Höhe über Start, z.B. 1800 m ü. NN. oder sind das Absolutwerte? Der Punkt extra RTH ist da ja eindeutig, aber was ist mit der festen Angabe?
4. Könnte man eine Kombination aus Auto-Start und Position- / Alt-Hold einstellen? Damit der Wing wie z.B. der Parrot Disco startet und erstmal kreist bis man in Ruhe sitzt und die Brille auf hat? Ansonsten müsste ich erst auf eine gewisse Höhe steigen und dann Pos-/ Alt-Hold einschalten, dass wäre auch ok.
5. Laut INAV 1.8 solle es einen Künstlichen Horizont geben, aber bei den OSD Einstellungen auf dem Bild sehe ich das nicht. Braucht man dafür ein Zusatzmodul?
Sorry für die vielen Fragen und schon mal vielen vielen Dank im voraus für die Mühe.
Beste Grüße
Kai
hi philipp,
vielen dank für die tolle doku!! mein s800 fliegt und ich hätte gern mir ein paar aufkleber geplottet. wo finde ich den das INAV logo zum laden das ichs mir zum plotten wandeln kann? danke grüsse
Hey Nico,
schau mal auf der GitHub Seite von INAV vorbei. Dort findest du das Logo. Meine Plotter-Software hat eine Fubktion zum Import, allerdings kann ich es nicht als Vektor exportieren.
Gruß,
Phil
HI Phil
danke dir !!
Gruss nico
Hi,
danke für das Klasse How to.
Mein AR Wing ist soweit fertig, jetzt aber noch eine Frage zu Nav Launch. Kann ich das auf den Arm Schalter legen ? Irgendwo habe ich gelesen, dass nach NAV Launch, also nach den 5 Sekunden, bzw. wenn ich die Sticks bewege das Nav Launch abgeschalten wird und wenn nichts anderes aktiv ich automatisch in den Acro komme. Past das so ?
(Y) ? funktioniert klasse arbeit
Hallo,
ich steige auch neu in dieses Thema ein und finde diesen Blog super (endlich mal auf Deutsch)!
Ich bestelle meist bei Banggood (viele andere Leser vermutlich auch). Daher meine Frage: Welches FC ist da empfehlenswert? Beim BF3.2 Omnibus F4 V2.1 gibt es wohl Probleme die mit einem hex file gefixt werden müssen: Until now working well, if you want to use INAV with SBUS (UART6) on this FC you have to use the hex file at the end of this link: https :// github . com /iNavFlight/inav/issues/2570
Da ich nicht unbedingt der große PC-Spezialist bin, habe ich mir daher das OMNIBUS Betaflight F3 AIO V1.1 bestellt, weil es bei youtube ganz gut abgeschnitten hat. Allerdings ist das review schon 1 Jahr alt.
Ist meine Bestellung die richtige Entscheidung, vor allem bei verwendung der aktuellen INAV Versionen (ab Version 1.8)? Hat es jemand vieleicht sogar erfolgreich mit INAV 1.8 oder höher erfolgreich im Einsatz?
Dank vorab und beste Grüße,
Elton
Hey Elton,
diese Version sollte eigentlich mit iNav kompatibel sein. Ich denke, das kannst du so verwenden. 🙂
Gruß,
Phil
Super, Danke! Ich habe einfach mal beide bestellt. Wenn ich dran denke, werde ich noch mal berichten obs funktioniert hat. Kann aber noch etwas dauern. Ich denke zuerst rüste ich meinen Copter mit INAV auf, später den Flieger.
BG, Elton
Ich bin gespannt, lass mal hören. 😉
Super Anleitung- vielen Dank. Aber ich habe ein Problem. Wenn der Wing vor mir liegt dann ist er auch im Tab gerade. Wenn ich aber im Angle Mode fliegen möchte dann zieht er nach unten (bis er einschlägt ? Bin heute etliche Runden im Passthru geflogen und da passt alles. Den FC habe ich kalibriert.
Hi Phil, Ich habe gerade das von Dir verlinkte GPS an den Omnibus angeschlossen und so konfiguriert wie hier gezeigt. Leider bleibt das GPS Symbol im Inav rot. Es kommen auch keine Daten im GPS-Reiter an. Was kann das sein ? RX-TX usw. alles korrekt an UART6 angeschlossen.
Hey,
TX/RX zufällig vertauscht? Hast du auch GPS aktiviert bzw bist unter freiem Himmel beim testen?
Gruß,
Phil
Hi Phil, es ist unglaublich, aber der Lieferant (BG) hat den kompletten Anschluss falsch gesteckt (ist wohl ein vorkonfektioniertes falsches Kabel).
Nach Umstecken aller Kabel kommuniziert das GPS mit INav .
THANKS
Okay, gut zu wissen. Kaufe das nächste mal lieber das original und unterstütze den Hersteller. =)
Gruß,
Phil
Super Beschreibung, hab meinen jetzt soweit auch fertig, nur egal was ich mache, GPS will einfach nix finden, wird dann auch immer rot in der Hardware Health angezeigt.
Absolute Top Infos und Hilfen für Einsteiger! Vielen Dank für die hervorragende Arbeit!! Vor allem in Deutsch!
Echt der Hammer. Vielen Dank. !!
Hello Phil,
Is it possible for you too post a picture sketch of the S800 compartiment layout.
I guess the battery will be as most forward as possible in the main compartiment. ESC in the back, and inbetween the FC/ PDB/ GPS/ filter (will that all fit ?).
VTX in one wing, RX in the other, buzzer between compartiment and VTX or RX.
Thanks.
Hallo; Experte/n gesucht. Bin selbst Anfänger! (In Sachen FC, ansonsten ganz gut informiert.
Habe einen SPRACING F3 Deluxe.
Nach den ersten Einrichtungen War zum Schluss das GPS dran. Beim Suchen nach Satelliten hat sich das system komplett aufgehängt.
Disconnected und Ende.
Bekomme keine Verbindung mehr zustande. Auch das flashen mit dem Spezialtool von ST MICROELECTRONICS
Hat zwar geklappt aber dennoch ist keine Verbindung mehr herzustellen. Immer die Meldung nach 10 sec. Serial Port kann nicht geöffnet werden.
Wer hat mir einen guten Rat?
Wolfgang Rauser
Thanks for these elaborate instructions!!
I’ve already build and flown 5 different wings in different sizes and setups.
Been flying FPV with quadcopters also.
Wanted to fly FPV with a wing for quite a while but hesitated because of the electronics / „programming“.
Now because of this „manual“ I’ve started building a new wing especially for FPV and will start ordering parts soon.
Hi Wilko,
thanks for your feedback. I hope its not to hard in germand and the translation works if you use one.
In the future i will translate it into english, but that takes some time.
Greets,
Phil
Hello Phil,
The German reading is no problem. (I live near the German border) Writing is what bothers me. But apparently English is also ok for you.
Keep up the good work!
🙂
Klasse Tutorial! Vielen Dank dafür. Ich bekomme bei allen nav_fw_launch_XXX -Befehlen –> „Unknown command“? Alle anderen haben wunderbar funktioniert!? Was mach ich denn falsch?
Danke schon mal im vorraus!
tipp mal „get nav_fw_launch“ ein und du erhältst alle Einstellungsmöglichkeiten. Um etwas zu verändern tippst du z.B. Foldendes ein “ set nav_fw_launch_motor_delay = 400″. wichtig ist das SET um eine Einstellung zu ändern
Bin ebenfalls am zusammenbauen des S800. Dieses Tutorial hilft mir enorm weiter! Fettes Danke!!!
Gibt es evtl. noch ein Tutorial(oder Link), wo beschrieben wird, wie man den Wing optimal auf der X9D einrichtet?
Vielen Dank für das tolle Tutorial.
Bin grad selbst am zusammenbauen eines S800.
Hab zwar schon viele Unterlagen zusammengesucht und bin schon ein gutes Stück vorangekommen, aber hier ist alles kompakt und super zusammengefasst.
Wird mir sicherlich enorm helfen, damit das Teil fliegt.
Dankeschön
Superklasse!
Ich beschäftige mich schon ein paar Wochen mit Inav.
Endlich mal eine deutsche Anleitung für das nötigste.
Viele Dank!