
KISS sinHybrid – Sinwave / BackEMF Hybrid-Commutation

![]()
Inhaltsverzeichnis
KISS sinHybrid, a new method of commutation, offers smoother motor running, higher efficiency, a back-EMF and sets new standards in the ESC field. In this short article I would like to try to explain the topic as easy and understandable as possible. As the first motor controller on the market, the new Flyduino KISS 32A controller has this feature installed.
First of all: I am not a motorcontroller expert and try to explain the principle as simply as possible. Many thanks also to Felix from Flyduino, who has told me in innumerable voice-/messages and pictures all about his new sinHybrid system and much more. If there are errors here, please let me know about them in the comments.
What is commutation?
Commutation (lat. commuto: change, convert) means to change the polarity of the current in the anchor, so that the engine can rotate. A brushless motor, as we use it in the drone industry, is controlled via three phases. There are a total of 6 different states in which a motor can be offset over its 3 phases. These 6 states changes are repeated again and again. Depending on the engine type and purpose, there are different types of control.
The Problem: Rotor-Position
In order to control the motor correctly, the motor controller must know in which position the rotor is located. There are different sensor and sensorless variants of doing this.
Hall-Effect Sensor
The position can be determined via several physical Hall Effect sensors. This type of positioning is not used in our hobby, however.
FOC – Field Oriented Control
In this method, the current of at least 2 (better 3) phases is measured to calculate the position of the motor. In fpv racing we do not use this method, as we would have to program the exact setup for the engine controller for this type of measurement.
That would mean that we need to know what kind of motor it is and what it is like (windings, magnets, etc). In addition, Propeller and LiPo would also need to be known so that an accurate indication of the position can be made via the current measurement.
The calculation is already difficult by the fact that the production tolerances such as KV number (number of windings) and with time weakening magnets of our „low-cost“ motors. Due to these reasons there is always a different calculation base.
Incidentally, DJI is one of the few manufacturers who uses FOC and full sine wave control in their E5000 system.
Back-EMF – Back Electromagnetic Force
Because not all phases are „powered“ on, (as with the full sine wave) one phase is switched off so you can determine the position with the voltage measurement on the open phase. Incidentally, today’s brushless fpv motors return a nearly perfect sine wave as a back EMF. This can be tested by turning the motor (for example with a cordless screwdriver; see pictures below) and measuring with an oscilloscope on the phases. Advantage of this method is quite clear that you can calculate the position fairly accurately and without knowing the motor characteristics or setup.


Types of commutation
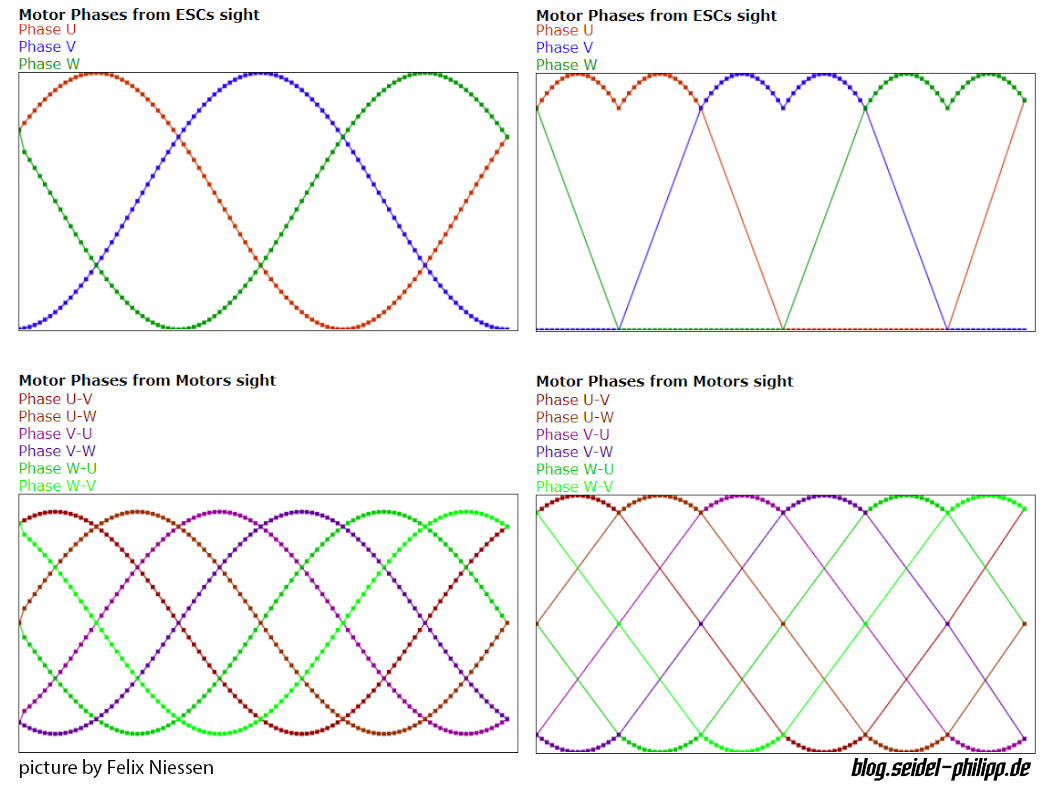
To control the a brushless motor, the following three methods are simplified. Please note that the following illustrations are all from the motor’s point of view and not from the point of view of the ESC. The view from the motor is the difference in voltages between individual phases.
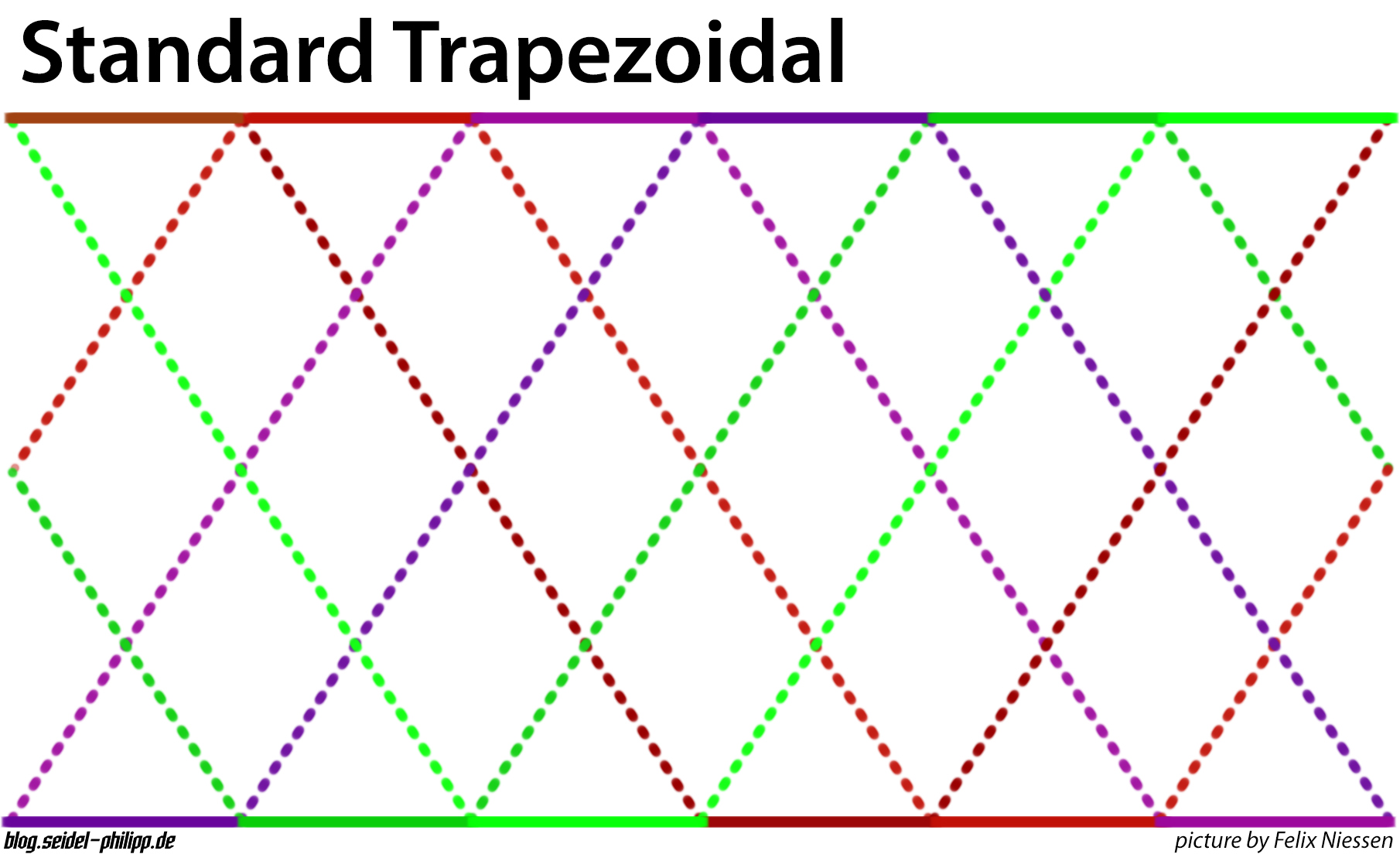
Trapezoidal block commutation
The simplest control is the trapezoidal block commutation, which is also used at BLHeli. There, the phases are reversed one after the other. Back-EMF can be used for position determination with this method. Disadvantages with this type of control is less smoothness and higher running noise, since the engine is „choppy“ driven.
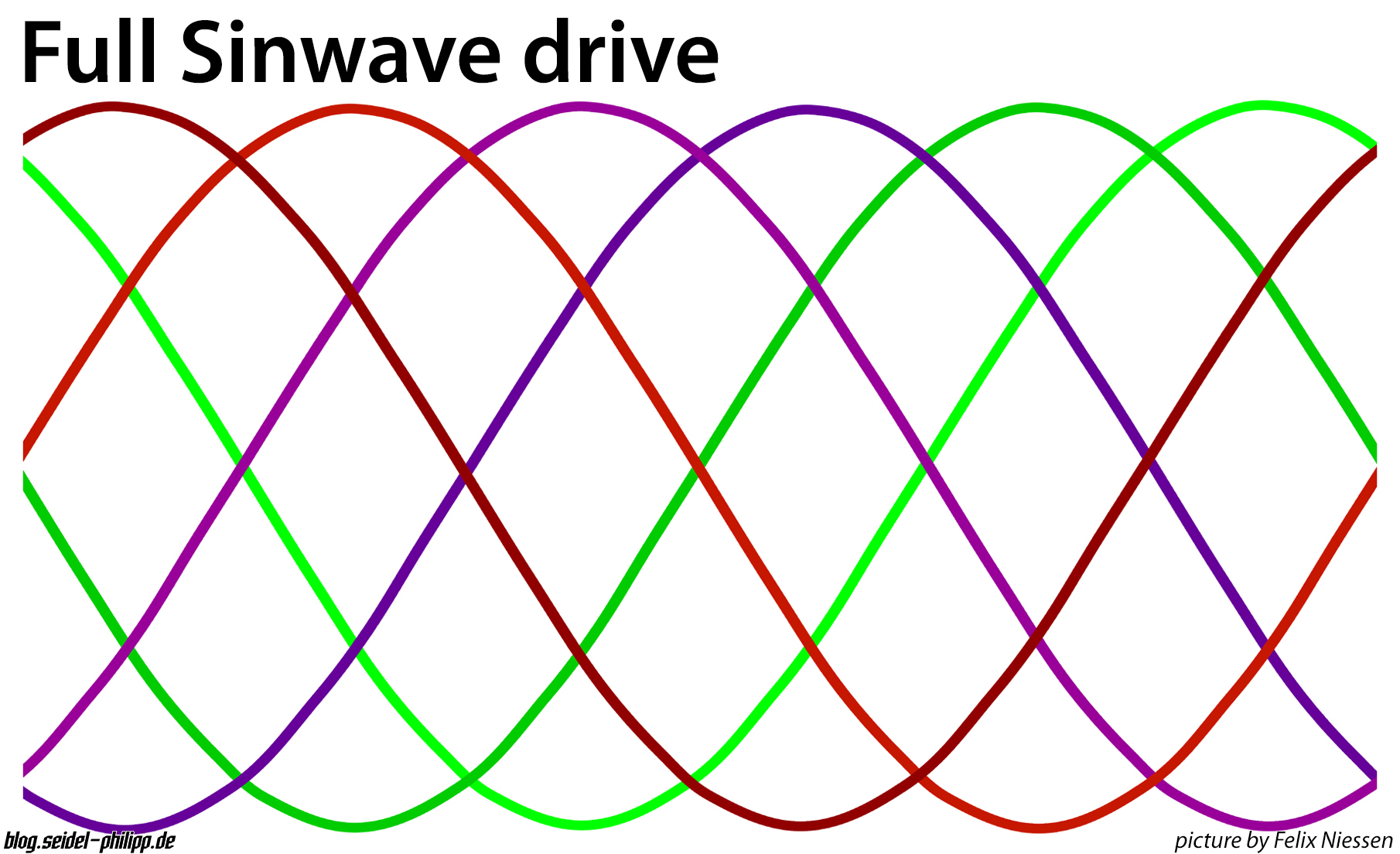
Full sinus curve
As mentioned above, the full sine wave curve only applies to FOC-capable controllers. This type of control has various advantages over sinHybrid and the trapezoidal block commutation. The motor runs very quietly and efficiently.In addition the motor it has better running stability which causes less vibration. However, this type of control does not apply for the fpv racing industry as mentioned above.
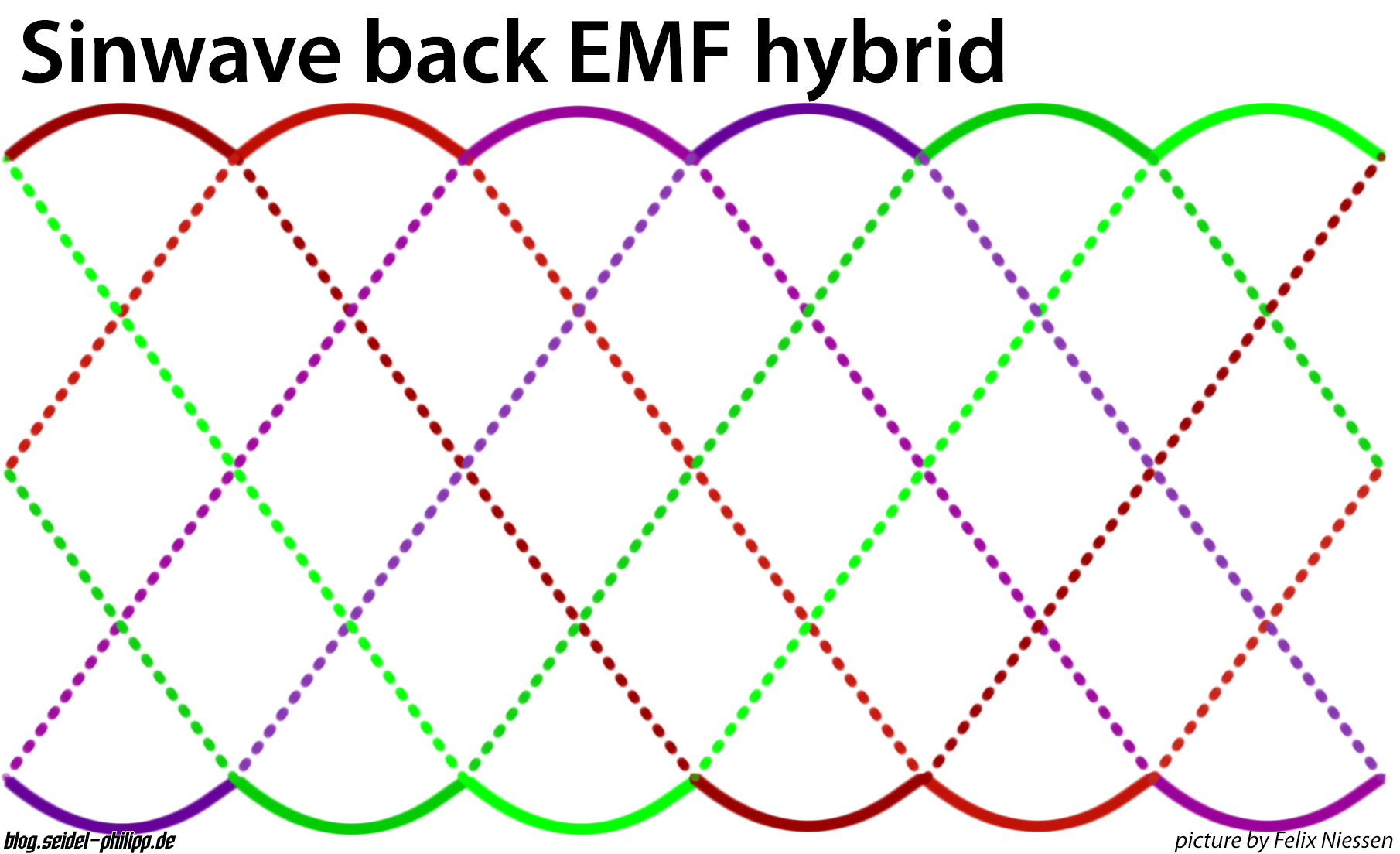
KISS sinHybrid
sinHybrid combines the trapezoid block commutation, but still controls the motor with a kind of sine wave. This makes the motor quieter and more efficient. Another advantage is the improved smoothness which means less vibration. The less vibrations are exposed to the gyro, the better and smoother the copter can fly in the end. In order to avoid loss in KV, the commutation fades into trapezoidal at around 90% throttle.


Very nice write up! Thanks