
Airbot Omnibus F4 Nano V6 Flight Controller + Ori32 ESC Anschlussplan / Wiringplan

I created this high resolution connection plan for the Airbot Omnibus F4 Nano V6 Flight Controller + Ori32 4in1 ESC.
You can buy it at www.flyingmachines.de
This connection plan will be constantly updated.
Please always link to the original image (3500px × 2633px, right click -> save as) so that the latest version is always displayed.
https://blog.seidel-philipp.de/wp-content/uploads/2018/07/Omnibus_F4_Nano_V6_Ori32_Flight_Controller_Anschlussplan_Wiringplan.jpg
Click the image to enlarge
If you are looking for more wiring plans, go here
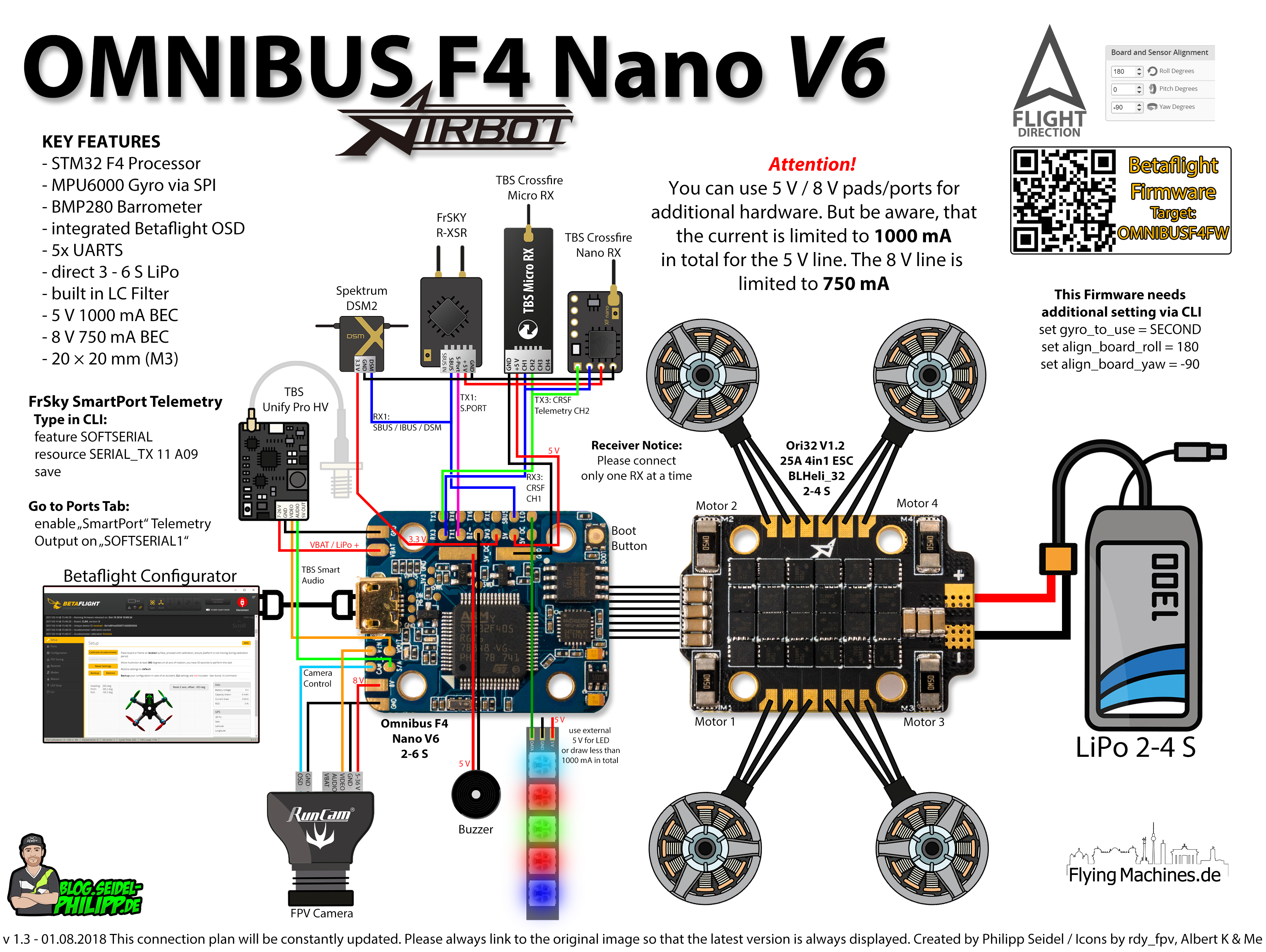
Hardware used in this wiringplan
- Airbot Omnibus F4 Nano V6 Flight Controller
- Ori32 4in1 ESC
- RunCam Swift 2
- TBS Unify Pro HV Race / TBS Unify Pro HV
- TBS Crossfire Micro RX
- TBS Crossfire Nano RX
- FrSky R-XSR FCC / LBT
- Spektrum Sat
- Piezo Buzzer / EU Shop
- WS2812 programmable LED / EU Shop
Created by Philipp Seidel
Credits: Icons by rdy_fpv , Albert K and Me 😉

Hey Philipp, I know it’s an ‚old‘ FC (wel not so, really), but still, can you look at this one: I’m having trouble putting inav (currently 2.3.0RC1)…
I’m using FIREWORKS2 hex.
My first question is: what is ’native‘ orientation of the board? I have USB on the LEFT, facing UP (UART3&6, LED etc…facing forward). In this orientation, what do I have to set for my board align? I just can+t nail the correct combo…:(
Also, what is the gyro and accel align here? No setting or rotated?
Thank you a lot for your time!
Jure
Hi Jure,
its a total mess. I cant find the Fireworks Firmware. Instead i flashed: Board: AIRB/OMNIBUSF4FW(STM32F405).
Flight direction in front (as in my connectionplan) the USB will be on the left. For that i have set these settings:
set gyro_to_use = SECOND
set gyro_1_align_yaw = 1800
set gyro_2_sensor_align = CW90
set gyro_2_align_yaw = 900
After this commands, always do „Calibrate Accelerometer“ and see if the directions all match!
Hope that helps!
Phil
Hallo Phil,
Danke für Deinen Anschlussplan! Funktionieren die Affiliatelinks für Dich auch bei Verwendung der Banggood App?
Ich habe Betaflight 4.0.5 target Omnibus F4FW für den Omnibus F4 Nano v6 mit Ori 32 verwendet. Welche Einstellungen muss ich für die Currentmessung vornehmen? Ich sehe current aber er zählt auch ohne drehende props rasch tausende mah. Danke!
hey Philipp
does vbat -gnd output at corner built in lc filter too?
cause in the manual says only 8v output built in lc filter…
I dont think, there is a LC Filter on VBAT line!
Hallo Philipp,
welches Target wäre denn für den Omnibus F$ Nano V5.1 korrekt?
kennst Du auch das Korrekte Inav Target?
Danke!
Hallo Achim, das müsste genau das Target sein, wie beim V6. Um auf Nummer sicher zu gehen, schließe den FC einfach an Betaflight an und schaue hier
Gruß,
Phil
Hi Phil, danke für diese Seite, hat mir viel geholfen.
Habe das Setup seit paar Monaten erfolgreich am laufen, nun habe ich ein GPS installiert für den Rescue_mode. GPS funktioniert, aber der Baro den ich nun auch dazu aktiviert habe will nicht richtig. Sowohl im BF Configurator als auch im Telemetry-Screen der Qx7. Es sind nicht die kleinen abweichunen durch Temperaturdrift oder Licht, er springt wahllos teils im Bereich bis zu 120m plus und minus und scheint kein realistisches Reading zu bekommen. Eine Idee?
beste Dank schonmal, Jeremy
Hey Jemery,
ich hätte auch sofort auf Luft oder Licht getippt, aber wenn du das ausschließen kannst kommt mir nur noch die Möglichkeit in den Sinn, dass die I²C Verbindung fehlerhaft ist. Hast du viele I2C errors (siehst du ganz unten in der Leiste des Betaflight Configurators).
Schalter mal testweise DShot ab und schaue, ob es immer noch Probleme gibt. Was für ein GPS/Baro hast du verbaut?
Gruß,
Phil
I hate type the Ori32. The plain geography of the board was just halfass designed. There is just no need to have those three capacitors basically sitting in lap of battery terminals. Now I am no rookie with the soldering iron but still hate to see stupid crap like that when there simply is ample space for them elsewhere.
Hey Andrew,
why is that a problem for you? These caps are directly connected to GND and VCC, so even if you touch them with solder, absolutely nothing will happen nor destroyed.
Greetings,
Phil
Bei mir läuft das 3. esc nicht nachdem ich die motoren über resource tauschen wollte. hab mir natürlich nicht aufgeschrieben welche pins da von anfang an drauf sind. hat mir jemand mit dem esc die motorenpins zur hand? habe nur motor1=B00 und Motor4=A02
habe heute Stunden versucht Smart Audio 2.1 des neuen unify Pro32 nano mit diesem FC in Gang zu bekommen. Leider ohne Erfolg, im LUA Skript wird der falsche Kanal angezeigt, wenn ich einen neuen vorgebe ändert sich nichts. Wenn ich ins OSD Menu gehe wird der Unify nicht erkannt.
Ich habe den Unify bisher mit dem S/A Port und mit TX6 verbunden, beides ohne Erfolg. Eingestellt in Betaflight habe ich eigentlich nichts außer Crossfire receiver und in den Ports Einstellungen etsprechend den UART peripherie auf Smart Audio, Baudrate Auto.
Kann man irgendwo das 2.1er Protokoll manuell wählen oder wird das von diesem FC nicht unterstützt? Kann im Internet leider wie immer null Dokumentation finden. Achja und ich möchte noch sagen dass es mein erster BF Kopter ist, bisher nur Kiss. Vllt übersehe ich auch eine triviale Einstellung. Oder ist der Unify DOA?
Und vielen Dank im Voraus!
hatte wohl recht, anderes Protokol welche von BF noch nich unterstützt wird
https://github.com/betaflight/betaflight/issues/7336
Hey Phil,
erstmal danke für das tolle Diagramm. Mit neuer Firmware (BF 3.5.2) hat sich scheinbar die Boardausrichtung geändert, aber mein eigentliches Problem bezieht sich auf S.Port vom R-XSR. Soweit läuft alles, alleine die Telemetrie krieg ich nicht ans laufen. Unter resource zeigt er mir korrekt „resource SERIAL_TX 11 A09“ an, allerdings steht unter Resource List -> A09 free. Hab alles probiert was irgendwo zu finden war. Unter Anschlüsse ist auch Smart Port bei Softserial 1 aktiviert, dennoch keine Telemetrie. Hast Du vllt noch eine Idee?
Beste Grüße,
Kasi
Irgendwelche Updates? Bekomme meine Combo nicht zum laufen :C
Hey Marco,
worum geht es denn genau?
Gruß,
Phil
hallo ich habe mir den flightcontroller mit einem spektrum sat spm4648 besorgt,nun hab ich folgendes problem :gebunden ist er nur bekomme ich leider absolut keine ausschläge im empfänger hin.
in betaflight ist bei anschlüsse :uart 1 serieller empfänger
konfiguration :serieller empänger spektrum 2048
angeschlossen ist er auf dem board mit 3,3v und am sbus pad
als funke nutze ich die dx6 g2 eu version v1.05a
was mache ich falsch habe auch schon diverse andere sats angeschlossen und immer das gleiche problem ????
Die Motoren am ESC sind ja vertauscht…wird das durch den CLI-Command „set align_board_roll = 180“ dann richtig zugeordnet obwohl der command sich ja auf den FC bezieht und nicht das ESC betrifft….? verstehe ich nicht ganz… oder muss ich die signalkabel des escs umsortieren z.b. motor 3 bei motor 1 einstecken….
wäre klasse wenn du mir das kurz erläutern könntest, da ich noch nie boards drehen oder motor mappings ändern musste…
dankeee!
Du kannst die Motorsignalkabel vom FC zum ESC umsortieren oder du kannst die Motor-Bindings im Betaflight ändern
Lass im BF mal im Motor Tab alle Motoren einzeln anlaufen und notiere dir welche du tauschen musst.
Bei mir waren es Motor 1 und 4.
Lass dir mit:
Resource list
alles anzeigen und suche dir Motor 1 und 4 raus, sowie deren Bindings, danach kehrst du diese einfach um
Bei mir war Motor 4 auf A02 und Motor 1 auf B00
Das ändere ich dann so:
resource motor 4 B00
resource motor 1 A02
save
Danach nochmal im Motor Tab prüfen und ggf die Motordirection im BlHeli umkehren.
Klasse, so mach ich’s!. Danke Dir!!
Hast du zufällig die Bindings im Originalzustand von Motor 3 und 4?
Hab mir die nicht aufgeschrieben und nun laufen die nicht mehr
Danke
Hi Philipp,
leider bekomme ich die Camera ctrl nicht zum laufen habe alles nach Anschlussplan von dir gemacht benutzt wird eine Caddx turtle.
Wäre cool wenn du mir da helfen könntest
Danke dir
Sebastian
Hallo Sebastian,
Wie hast du denn die „Turtle“ nach meinem Anschlussplan angeschlossen bekommen? Die hat gar keinen Analogen Pin für Camera Controle soweit ich weiß.
Die „Turtle V2“ hat soweit ich weiß TX/RX, das heißt es hat eine digitale Schnittelle zur Steuerung. Falls du die V2 hast, kannst du sie einfach an einen freien UART der FC anschließen (TX auf RX und RX auf TX)
Gruß,
Phil
Hi di V1 hat doch auch schon dioe TX /RX pads auf, was wähle icg dann im Betaflight aus ? RunCam Device ?
Ich glaube bei der Caddx musst du einen Vorwiederstand einlöten, 150-600 Ohm.
Aber ich frage nochmal einen Freund, der hatte das selbe Problem.
Hi, wäre Super wenn du deinen Freund fragen könntest, bekomm des Teil nicht zum laufen.
Hey, sorry länger nicht reingeschaut
Er meinte er hätte es nachher nur über einen CLI Command lösen können, aber auf die Frage welcher es war konnte er noch nicht antworten -.-
Ich hacke nochmal nach!
Hey Philipp,
Danke wie immer für den schönen Plan.
Was mit noch fehlt darauf ist GPS und Magnetometer 😉
Denn meine Frage bezieht sich auf den Magentometer Kontakt:
in der Anleitung steht dass bei UART3 I2C verfügbar ist als Funktion – also für SDA und SCL nutzbar sein sollte.
wie kann ich das aktivieren bzw nutzen für, in meinem Fall, z.b. Magnetometer? Ich finde dazu nichts im Netz, noch irgendwelche Anleitungen. hab den Beitan BN-880 angeschlossen. GPS läuft aber vom Mag keine Meldung?!
Ich habe im Configuration Tab auch alles aktiviert. Aber muss ich bei den Ports oder im CLI noch was eintragen das er das erkennen kann?
Schöne Grüße
Max
Hey Max,
schau mal hier, das müsste dir eigentlich weiterhelfen: https://github.com/betaflight/betaflight/issues/3905
Gruß,
Phil
bei mir hat OMNIBUSF4FW nicht funktioniert, ich musste die OMNIBUSF4SD flashen. Liegt das am neuen Betaflight oder mache ich was falsch?
ich verwende den betaflight configurator 10.4.0 und firmware 3.5.0
Hey Helmar,
was hat denn nicht funktioniert? Die Firmware muss sich auf jeden Fall flashen lassen, da gibt es keine Abfrage, die das verhindern würde. Ich würde dir empfhelen es nochmal zu versuchen, denn du benötigst schon die korrekte Firmware (OMNIBUSF4FW) auf der FC.
Gruß,
Phil
Hat das nette kleine Teil denn auch Blackbox? Bin grade an nem neuen Build und bei den 20ern fehlt mir irgendwie imme die Blackbox.
Bei dem hier stehts dabei: http://www.readytoflyquads.com/flip-32-f4-omnibus-nano
Aber mit der tollen Anleitung tendiere ich ja lieber hier zum Airbot
Die V6 hat onboard flash für die betaflight blackbox
Die V5 und wahrscheinlich auch Ältere haben soweit ich weiß keinen
Guys, i updated the connectionplan. Now with correct Firmware and CLI Commands to roate the FC according to the Shematic! =)
Hey, tolle Anleitung!
Ich hab grade einen V5 geschrottet als das SBUS Pad abgerissen ist, kann man zwar an anderer Stelle anlöten, hält aber nicht gut
Deswegen das Upgrade auf den V6
Ich hab nen Tramp HV und einen XM+ sonst so wie in der Abbildung
Der Tramp hängt am TX3
Wenn ich die OMNIBUSF4FW flashe hab ich alle UARTS aber ich bekomme die Sensoren nicht zum laufen
In BF3.4 scheint es jetzt auch set gyro_to_use = FIRST zu heißen?
Mit der OMNIBUSF4SD hab ich zwar alle Sensoren aber nicht alle URATS und da ESC auf UART4 ist, der aber in der SD Firmware nicht auftaucht würde mir das dann fehlen, oder?
Ich bin noch sehr neu und bei sowas leider schnell überfordert : /
Wäre super, wenn mir Jemand erklären könnte welche FW, welche CLI und welche Settings ich brauche, damit alles funktioniert 😀
Vielen Dank und liebe Grüße,
Jan-Patrick
Hey,
habe gerade eben den Anschlussplan geändert. Man muss die Firmware OMNIBUSF4FW verwenden. Dazu habe ich noch ein paar CLI Commands gepackt und alles mal ausprobiert und getestet! Habe 6 UARTS. Smartport/Telemetry über Softserial (CLI Commands dafür sind auch auf dem Plan) SBUS normal über UART laufen.
Das mit dem Gyro hat mich auch verwundert, da ich derzeit 3.3.3 fliege und da gabs „FIRST“ „SECOND“ und „BOTH“ nichts. Da vorher der erste Gyro die Nummer 0 hatte, musst du nun den „SECOND“ Gyro verwenden, dann klappts, auch hier stehen alle CLI Commands auf dem Plan.
Hoffe das hilft dir,
Gruß,
Phil
Ja vielen Dank für das Update!
set gyro_to_use = SECOND
hatte ich mittlerweile auch schon hinbekommen, aber die Anleitung die beim FC beilag war da nicht hilfreich
Läuft bei mir jetzt gut mit BF 3.4
Ich hab den USB Anschluss oben rechts in Flugrichtung dafür musste ich unter Configuration bei Board and Sensor Alignment Pitch ° auf 180 und Yaw ° auf 270 stellen
Dann noch im CLI Motor 1 und 4 tauschen und beim Motor 4 auf dem 4in1 ESC zwei Kabel tauschen, damit alle nach innen drehen 😀
Ich weiß nicht ob es nicht vielleicht auch einfacher gegangen wäre, aber ich bin noch neu 🙂
UART1 ist Serial vom SBUS (XM+)
UART3 hat bei mir auf TX3 den IRC Tramp
UART4 ist ESC Sensor Input
Und meine Runcam ist mit dem CAM Port verbunden und das OSD lässt sich auch über den FC steuern
RSSI vom XM+ bekomm ich über AUX12
Es scheint hier nicht so bekannt zu sein, dass der XM+ RSSI übers OSD kann
Mir ist aufgefallen, dass die Battery Voltage immer etwas zu niedrig angezeigt wird, deswegen hab ich momentan die Scale auf 111
Erstmal danke für die tollen Pläne, immer sehr hilfreich für die nicht so Erfahrenen.
Hab aber ein kleines Problem. Hab den R XSR angeschlossen und bekomme SBUS einfach nicht zum laufen. Hab schon beide Varianten am XSR ausprobiert. PPM geht, SBUS verweigert sich kompletz.
Hey Nuked,
ich habe gerade den Plan aktualisiert! Spiel mal bitte die korrekte Firmware auf.
Danach unter Ports „Serial RX“ auf UART 1 aktivieren. Dann erst unter „Configuration Serial RX und SBUS“ auswählen, dann sollte es klappen. Stelle sicher, dass der Receiver gebunden ist und auch auf den Kanälen etwas gesendet (Sticks) wird.
Hoffe ich konnte helfen.
Gruß,
Phil
Hey Phil,
does the combination of Ori32 + Nano F4 v6 allow esc telemetry (Current, RPM, Temp…) without any modification, or is it „just“ the analog current reading?
Greetz
York
Airbot said, it should work! Its RX4 so no ADC. I did not tested it!
Greetings,
Phil
Hi Phillip
The Airbot product page for the Nano v6 shows the info: „Firmware, please use Fireworks v2, but set gyro to use as 1.“
Which makes sense to me since both FCs have 5 UARTs, the standard OmnibusF4 target only has 3 (UART1,3 and 6). Also the Fireworks has 2 Gyro-sockets, and the Nano v6 only one which seems to be connected to socket 1.
Greetings,
Markus
Hey Markus,
please check the comment above. I read out the Firmware of the CLI: https://imgur.com/a/212c8Wx
Its OMNIBUSF4 but manual says it should be OMNIBUSF4FW. Maybe the factory flashed the wrong firmware. So i flashed Omnibus Fireworks Firmware (OMNIBUSF4FW) and i needed to change the Gyro to 1 as well. I also needed to change YAW 90° and ROll 180° to get the correct board orientation. https://imgur.com/a/1JUJYQ0
I don’t know why they don’t create a new target on Betaflight. I am in contact with Airbot about that, but i need to always wait a few days for a response.
I hope i can get a 100% firm statement to correct (or not correct) the connectionplan!
Thanks! =)
Phil
Hm, Omnibus F4 Fireworks target was added with Betaflight 3.3.2 so maybe the FW wasn’t finished at the time of manufacturing of the Nano v6 you received and they flashed OmnibusF4 v3.3.0 so it at least works. But yea let’s wait for Airbot to reply on this.
Btw. I was also wondering about the correct orientation of the FC, because it is nowhere mentioned. Not in the manual and not printed on the board.
Markus
Orientation of the FC with standard Firmware is always USB to the back. No answer yet from Airbot, but i think you’re right with the Firmware! 🙂
Hey Philipp
Lovely diagram as usual. There seems to be quite a bit of confusion on this board regarding correct firmware target. You might want to check as my research tells me its the omnibus fireworks target not the f4 target + there is a cli command necessary to pick gyro number 1.
Also, the orientation of the board info is really welcome as there is nothing in the manual about this.
Mark
Hey Mark,
indeed the manual is quite confusing. Regarding the Firmware, i looked up in the CLI which firmware was installed and it was OmnibusF4. I needed to change the orientation also to set it up correct.
But i will talk to Airbot again about this to verify the information. Please stay tuned!
Greetings,
Phil