
RunCam Micro Swift 3 – Camera Control via UART


![]()
With the RunCam Micro Swift 3, the chinese cam manufacturer RunCam introduces a new interface between FPV camera and flight control. Via a serial UART interface (TX/RX) it is now possible to control the camera completely by your radio. So you don’t have to carry the joysticks with you anymore. I assume that the new FPV cameras will all have this interface in the future.
Inhaltsverzeichnis
Difference to the „old“ Cam-Control method
Up to now it was already possible to address an FPV camera with the „Cam-Control“ method. Especially with older FCs a remapping of the pads as well as additional components like resistors were often necessary. This is no longer necessary with the new serial connection.
For example, you could send direct commands to the FPV camera via the serial connection. For example, the quick selection of certain camera presets, adapting certain camera settings during flight, etc could be possible in the future. This will not work with the „resistor method“. At the moment, however, it has to be said quite clearly that it behaves practically like the old „Cam Control“ method. Only the joystick is emulated. Nevertheless, the protocol over a serial interface is considerably expandable for new functions.
Translated with www.DeepL.com/Translator
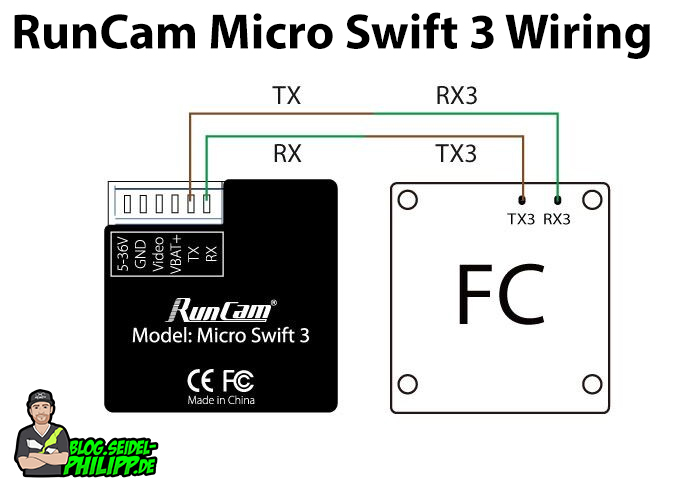
Wiring RunCam Micro Swift 3
The RunCam Micro Swift 3 can be connected to any Betaflight flight control with a free UART. This function is available since Betaflight version 3.3.0.
Note that TX and RX are always connected together. This means that the camera’s RX is connected to TX of the flight control.
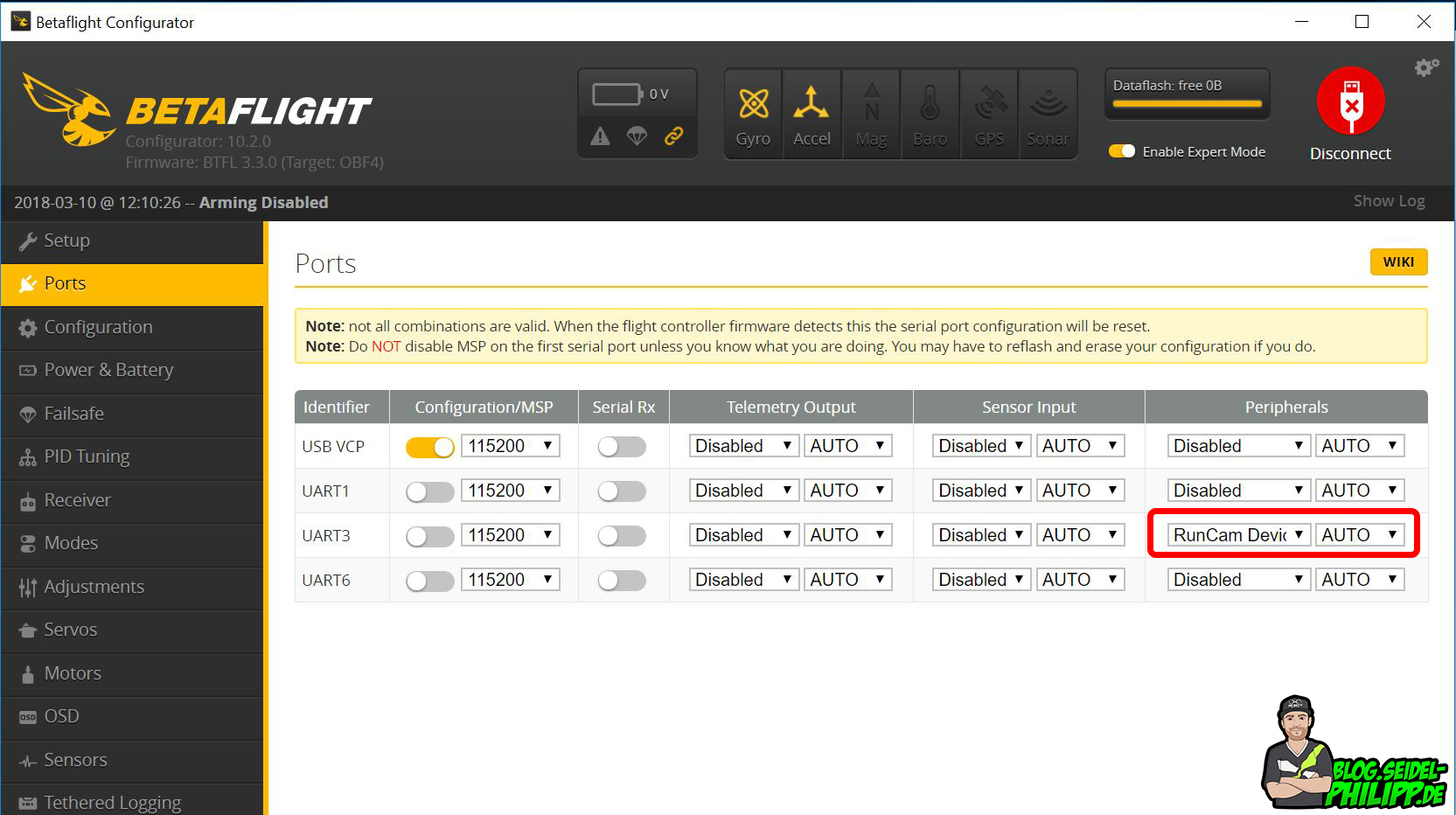
Betaflight Configuration
In the tab „Ports“ you only have to activate the „RunCam Device“ in the column „Peripherals“ under the appropriate UART port.
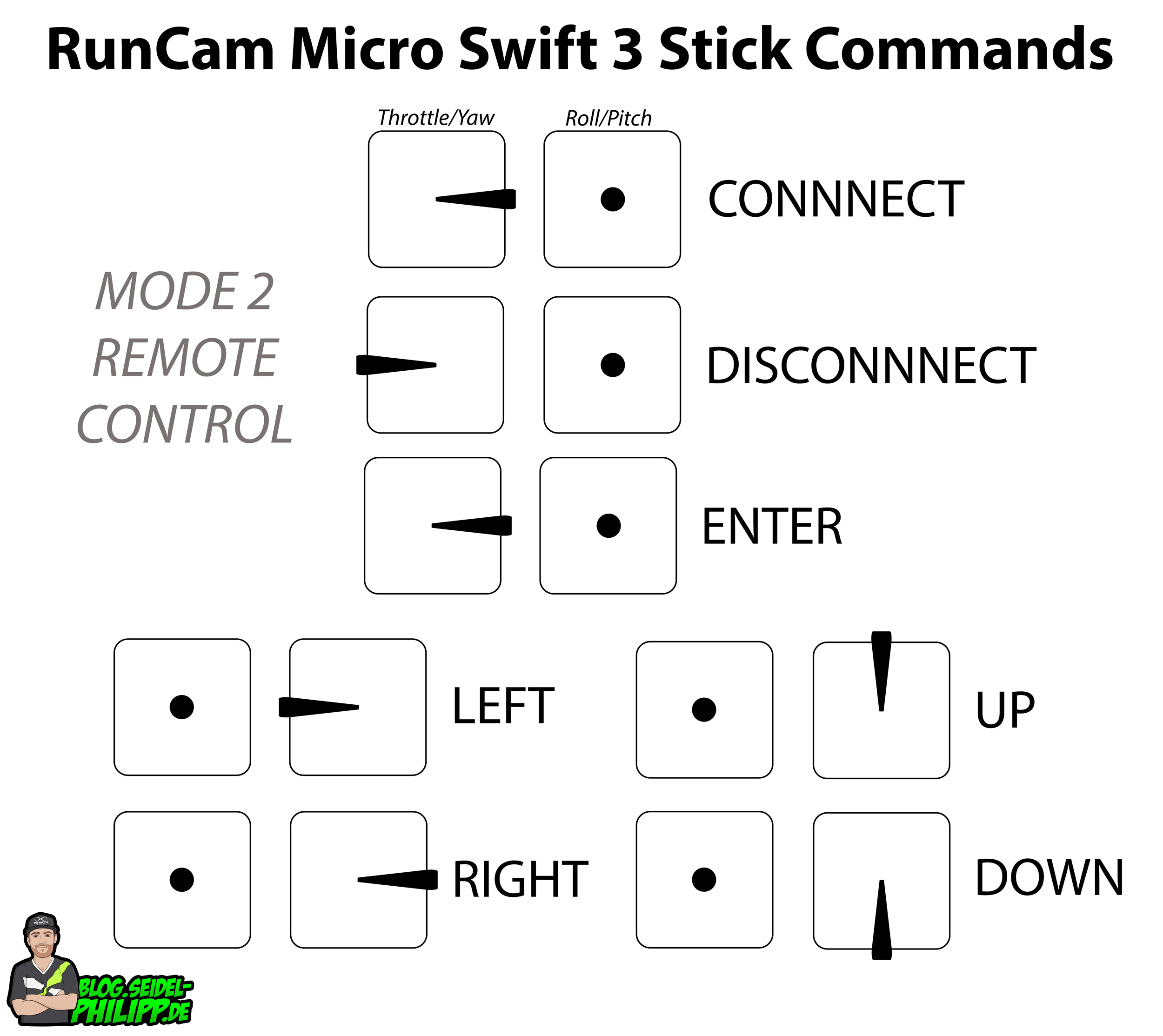
Operation
The camera is operated by your remote control. Below you will find the Stick Commands for a Mode 2 remote control. First, you need to connect to the camera. After that, all further stick commands are available and you can navigate through the camera menu.
Flyduino KISS FC?
Flyduino has not implemented this function yet! Lets Go Flyduino, here’s the info about the new protocol!
Github Pull-Request: https://github.com/betaflight/betaflight/pull/4251
Protokoll Dokument: http://note.youdao.com/groupshare/?token=9AD3F89F0B92488E8241F58CAEDF7939&gid=29699666

Does this work with SoftSerial? If so how, do you configure that in BetaFlight?
Hi Jim,
Could work but never tried it:
https://github.com/betaflight/betaflight/wiki/RunCam-Device-Protocol#setup
Just try it. I did a Tutorial on Softserial here: https://blog.seidel-philipp.de/betaflight-soft-serial-invert-frsky-smartport-telemetry-without-soldering/
Let me know if it works?
Greetings,
Phil