
RunCam Micro Swift 3 – Serielle Steuerung mit Betaflight


![]()
Mit der RunCam Micro Swift 3 stellt der chinesische Cam-Hersteller RunCam eine neue Schnittelle zwischen FPV Kamera und Flugsteuerung vor. Über eine serielle UART Schnittelle (TX/RX) ist es nun möglich die Kamera per Fernsteuerung komplett zu bedienen. Man braucht also nicht mehr Joysticks mitzuführen. Ich gehen davon aus, dass in Zukunft die neuen FPV Kameras alle diese Schnitstelle haben werden.
Inhaltsverzeichnis
Unterschied zur „alten“ Cam-Control Methode
Bisher konnte man eine FPV Kamera schon mit der „Cam-Control“ Methode angesprochen werden. Dafür war vor allem bei älteren FCs oft ein remapping der Pads sowie Zusatzbauteile wie Widerstände nötig. Diese entfällt nun mit der neuen seriellen Verbindung.
Man könnte zum Beispiel über die serielle Verbindung direkte Befehle an die FPV Kamera senden. Zum Beispiel das schnelle auswählen bestimmter Kamera-Presets, Anpassen von bestimmten Kamerasettings während des Fluges, usw. Das wird mit der Widerstandmethode nicht funktionieren. Im Moment muss man aber ganz klar sagen, dass es sich praktisch so verhält wie die alte Methode „Cam Control“. Es wird lediglich der Joystick emuliert. Dennoch ist das Protokoll über eine serielle Schnittelle wesentlich ausbaufähiger für neue Funktionen.
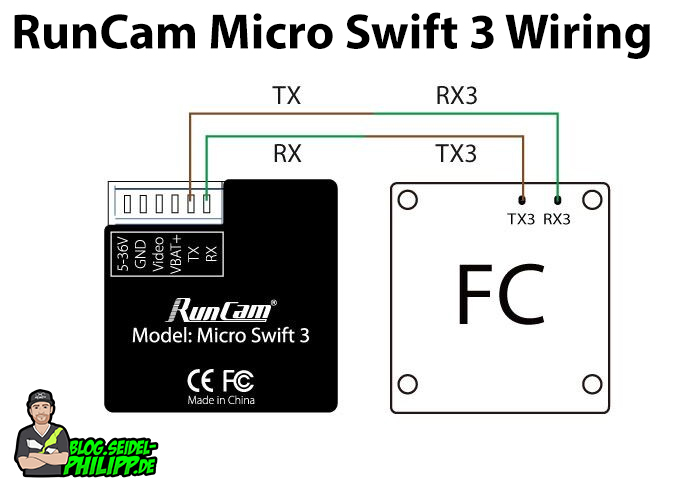
Verkabelung RunCam Micro Swift 3
Die RunCam Micro Swift 3 kann an jeder Betaflight Flugsteuerung angeschlossen werden, welche einen freien UART zur Verfügung stehen hat. Die Funktion steht seit der Betaflight Version 3.3.0 zur Verfügung.
Beachte, dass TX und RX immer zusammen angeschlossen werden. Das heißt RX der Kamera wird an TX der Flugsteuerung angeschlossen.
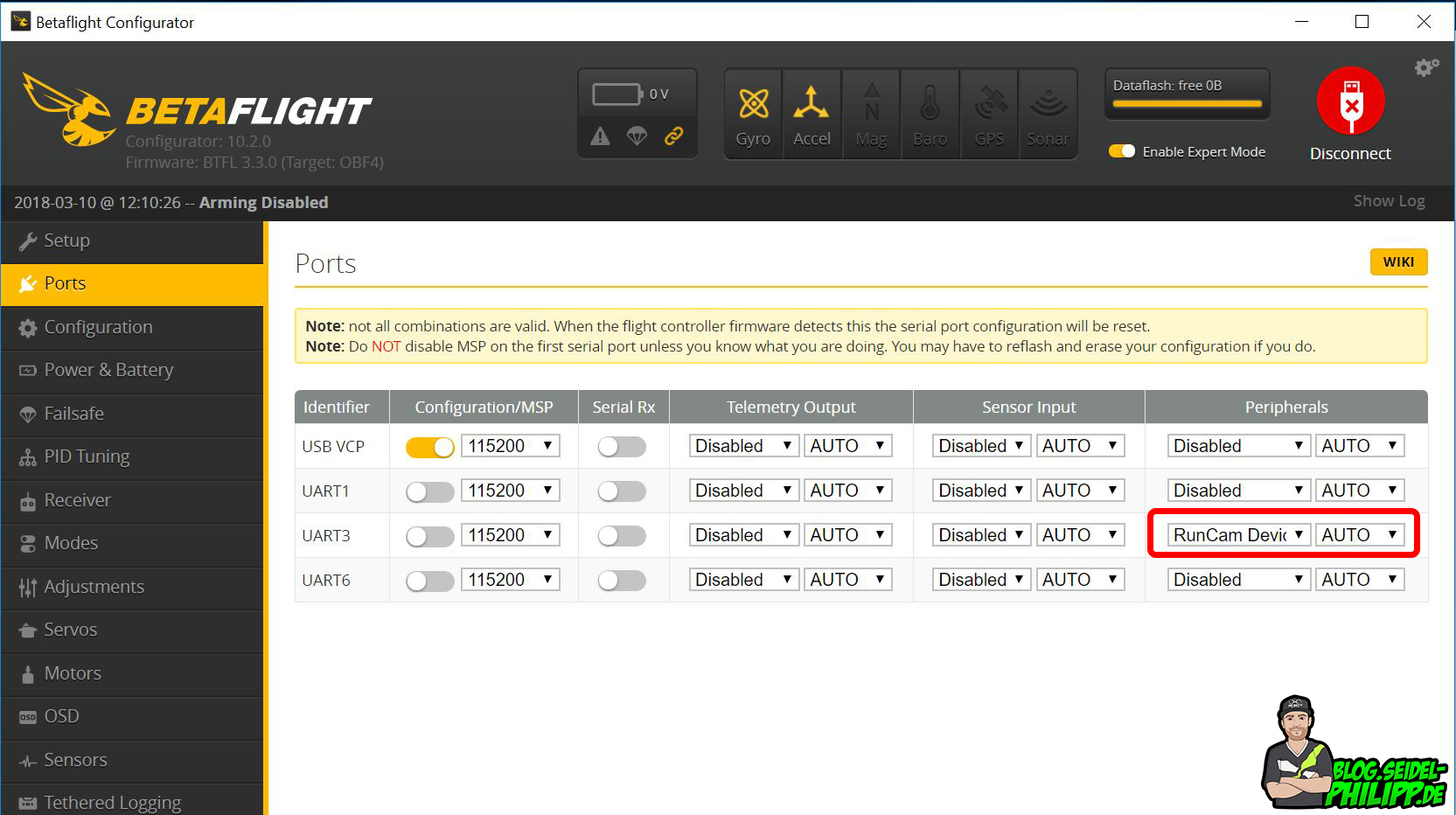
Konfiguration Betaflight
Im Tab Ports müsste ihr lediglich unter dem passenden UART Port das „RunCam Device“ in der Spalte „Peripherals“ aktivieren.
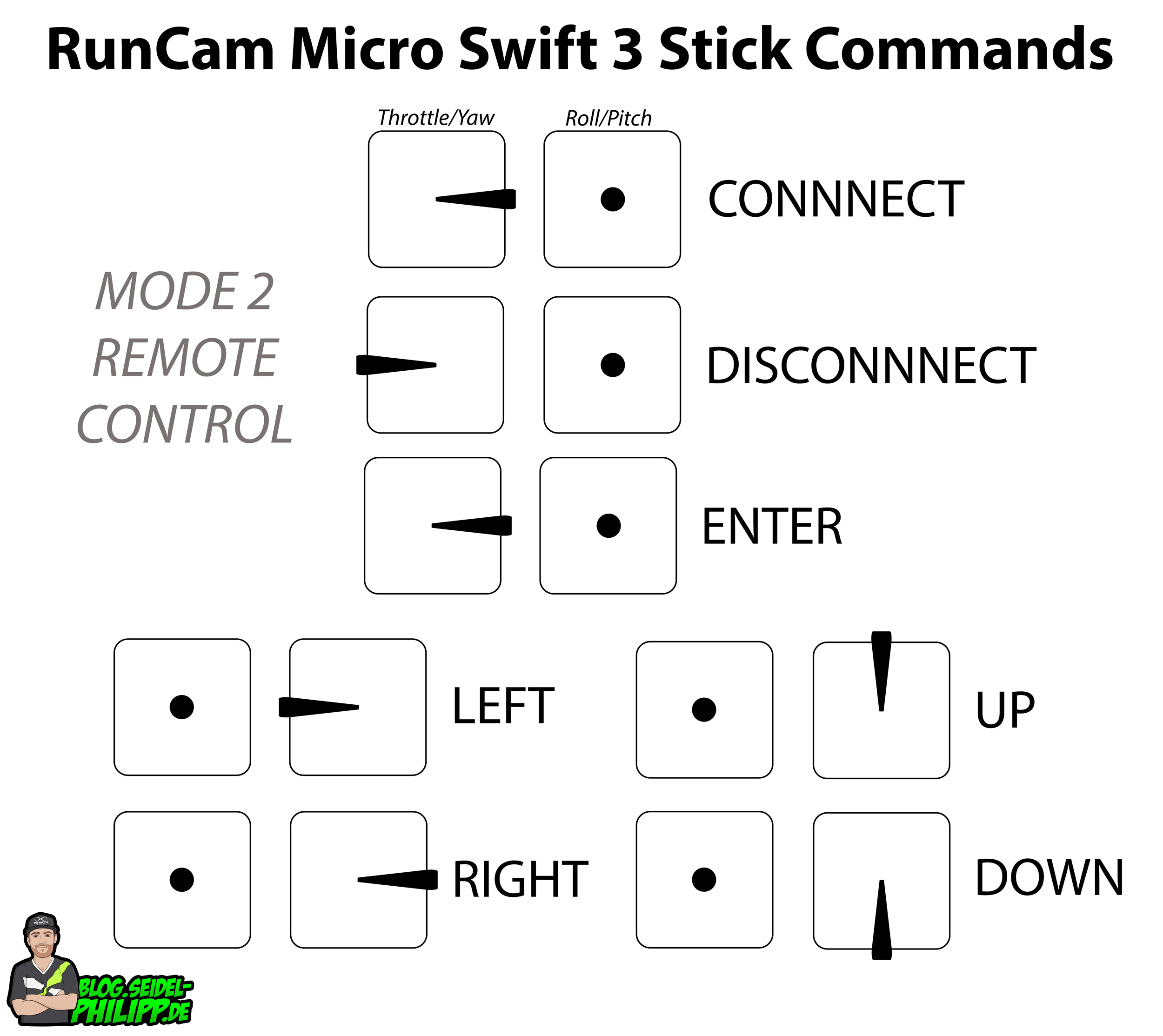
Bedienung
Die Bedienung der Kamera erfolgt über eure Fernsteuerung. Nachfolgend findest du die Stick Commands für eine Mode 2 Fernsteuerung. Als erstes musst du dich mit der Kamera verbinden. Danach sind alle weiteren Stick Commands vorhanden und du kannst durch das Kamera Menü navigieren.
Flyduino KISS FC?
Flyduino hat diese Funktion noch nicht implementiert! Lets Go Flyduino, hier habt ihr die Infos zu dem neuen Protokoll!
Github Pull-Request: https://github.com/betaflight/betaflight/pull/4251
Protokoll Dokument: http://note.youdao.com/groupshare/?token=9AD3F89F0B92488E8241F58CAEDF7939&gid=29699666

Und was ist da der Vorteil, gegenüber dem „normalen“. Cam Control“
Hallo Markus,
Bei manchen FCs muss man mit Widerständen arbeiten, dass es über Cam Control funktioniert! Mit dieser Methode ist das alles relativ stressfrei ohne remapping und co! Die „Widerstand Variante“ war eine nette Sache, aber auf Dauer denke ich, dass ein UART mehr Sinn macht.
Man könnte zum Beispiel über die serielle Verbindung direkte Befehle an die FPV Kamera senden. Zum Beispiel das schnelle auswählen bestimmter Kamera-Presets, Anpassen von bestimmten Kamerasettings während des Fluges, usw.
Das wird mit der Widerstandmethode nicht klappen =)
Im Moment muss man aber ganz klar sagen, dass es sich praktisch so verhält wie die alte Methode „Cam Control“. Es wird lediglich der Joystick emuliert.
Aber wer weiß, eventuell kommen demnächst weitere Software Anpassungen.
Gruß,
Phil
Hallo. Ich habe einen FC (Omnibus f4 v3 ..
Runcam HD split 2 .
Hab es auf den Uart 6 gelegt … jedoch keine Reaktion .
Alle anderen uarts sind belegt . Crossfire , Smartaudio .
Könnt ihr mir helfen ?!
Das hat doch schon mit B.F.3.2 und der Foxeer mit Hilfe von nem Wiederstand funktioniert
Hey Dominik. Ja, so ähnlich! Ich habe es mal oben ergänzt!
Gruß,
Phil