
Baubericht – Mini Indoor FPV Racing Quadcopter

Es geht auf den Winter zu und ich habe mir überlegt, etwas kleines zum fliegen im Haus zu bauen. Ich habe mich für einen mini Quadcopter ähnlich dem Hubsan X4 entschieden. Die Teile kaufe ich alle einzeln und baue mir daraus einen kleinen Flitzer.
Inhaltsverzeichnis
Die Teile
Also kurz auf www.banggood.com gestöbert und folgende Dinge bestellt.
- Flugsteuerung: Micro Scisky 32 bit Brushed Flight Control Board oder Quanum Pico 32 bit
- Motoren: 4x 8×20 mm brushed Motoren
- Propeller vom Hubsan X4
- Lipos: 1S 3,7 V 500 mAh
- Lipo Kabel: 1 To 6 Balance Charger Cable
- Ladegerät: USB
- FPV Kamera: 600TVL 1/4 1,8 mm CMOS 3,7–5V
- FPV Sender: Boscam TX5823 5.8 GHz 200mW Video Transmitter Module
- FPV Antenne: eine alte 5,8 GHz Stabantenne
- Sender für Taranis: OrangeRX DSMX/DSM2/Devo 2.4GHz
Frame aus dem 3D DruckerHubsan X4 107D- Spannungsregler Polulu S7V8F3
Flugsteuerung
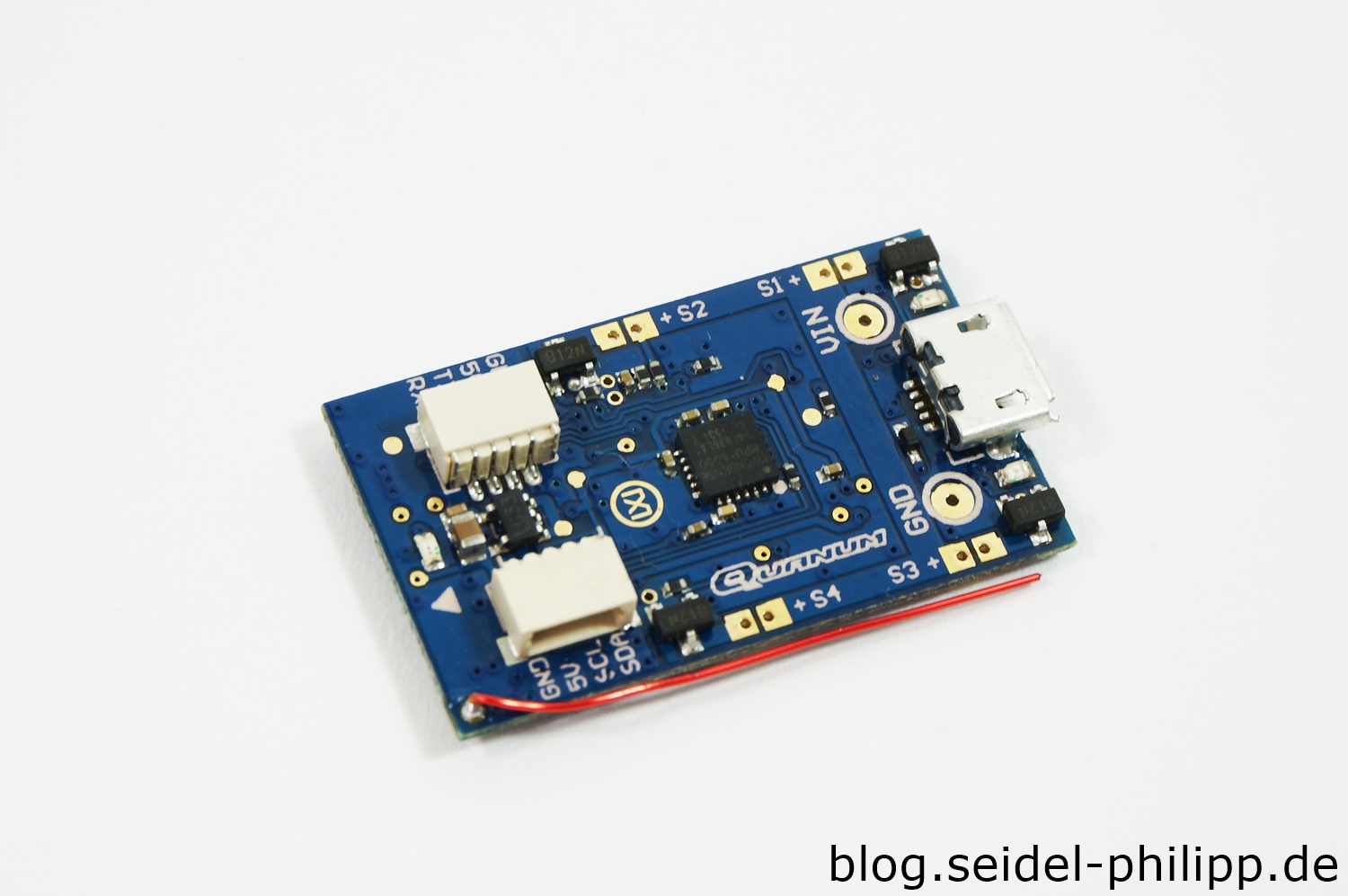
Als Steuerung habe ich mich für das Micro Scisky 32 entschieden. Diese Flugsteuerung hat einen DSM2 Empfänger integriert. Hauptgrund für den Kauf, war aber die Kompatibilität mit Cleanflight.
Auf meinem Mini Quad möchte ich Betaflight laufen lassen.
Motoren
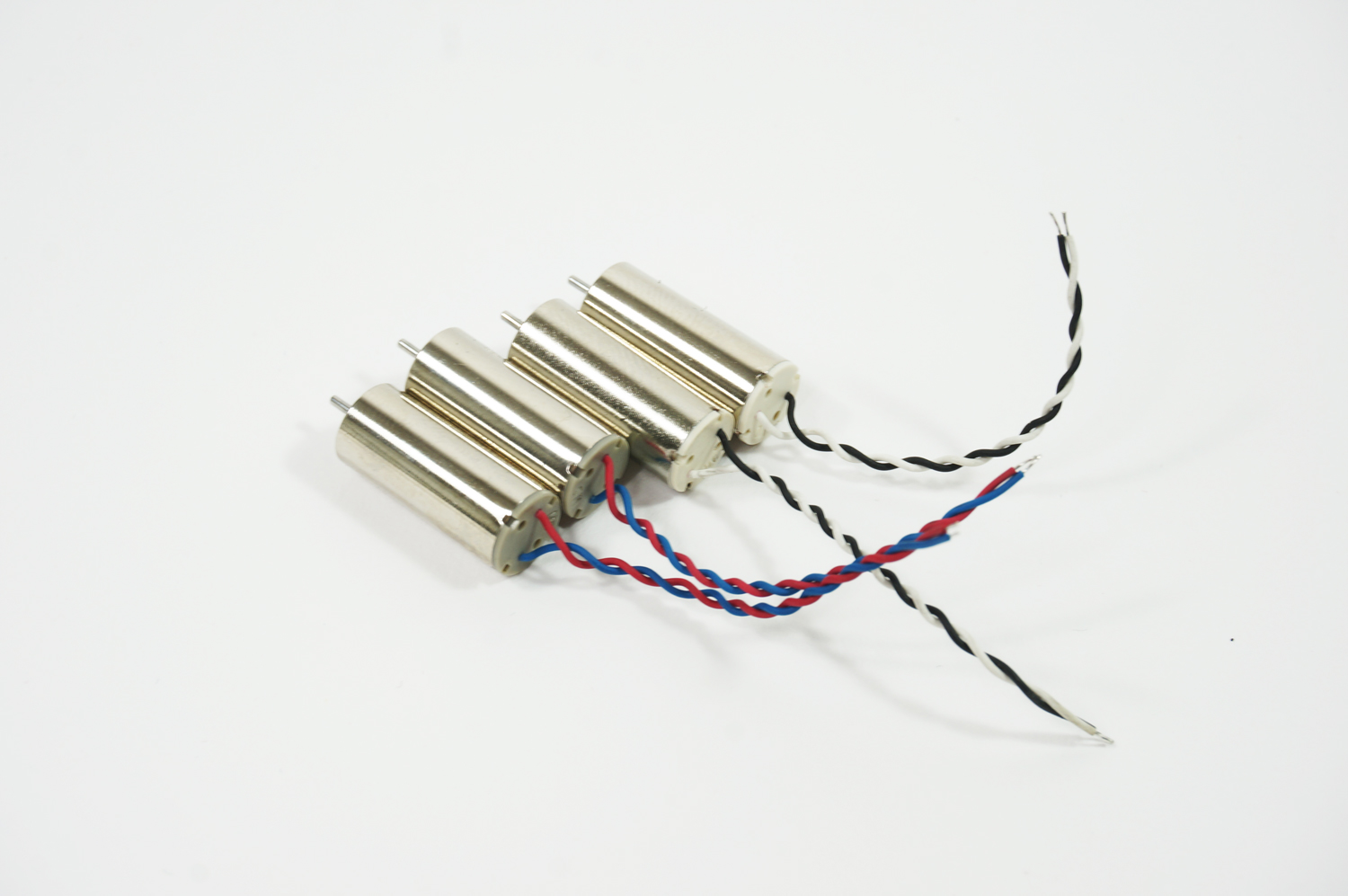
Ich habe mich für 8mm „brushed“ Motoren entschieden, da ich diese schon aus dem Hubsan X4 kenne und mit der Leistung zufrieden war.
Propeller

Propeller nehme ich die normalen Hubsan X4 Propeller. Ich möchte aber auf jeden Fall die kleinen Triblades austesten.
Lipo
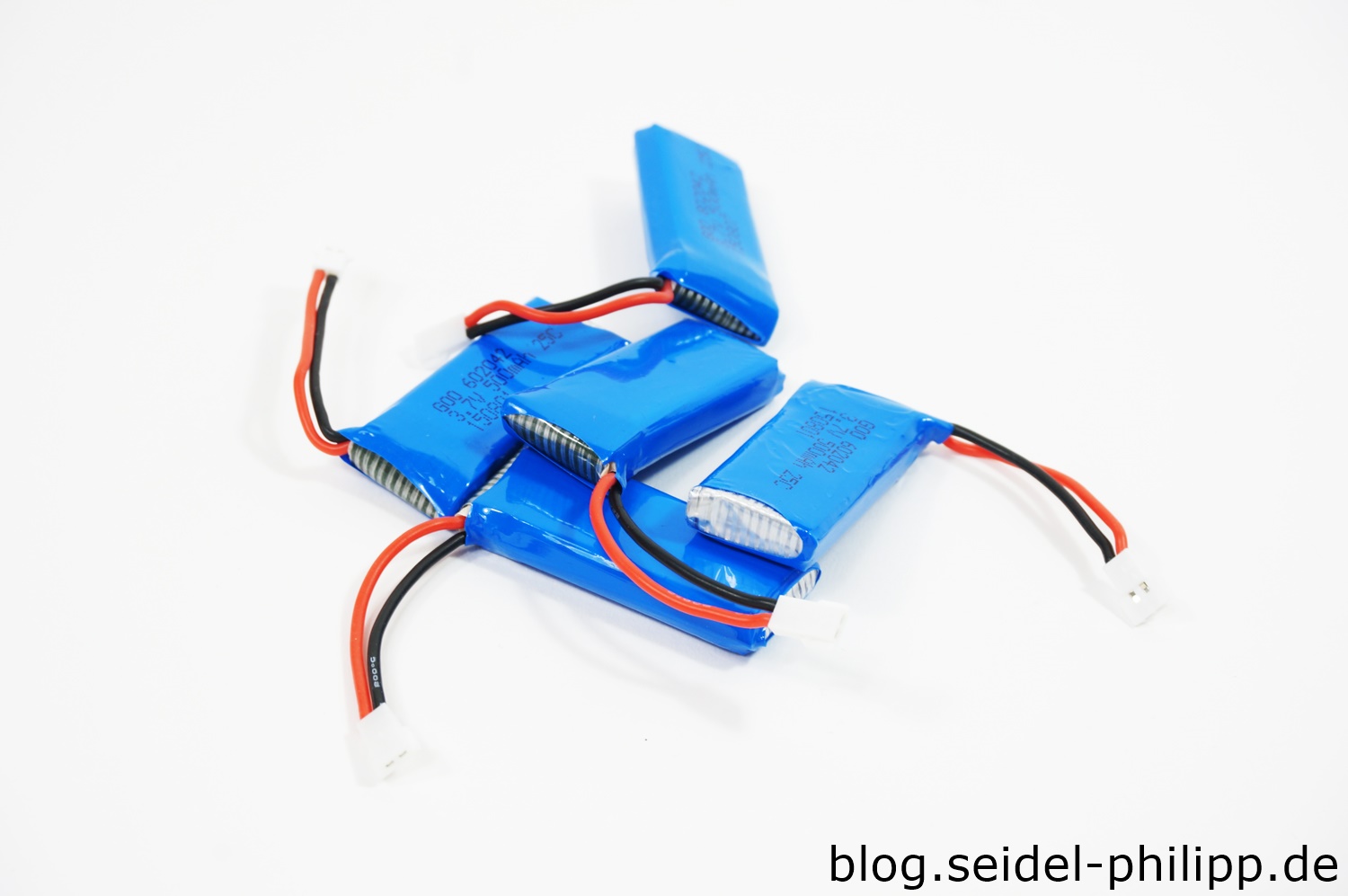
Für die Stromversorgung habe ich mich für 1S 3,7 V 500 mAh Lipos entschieden.
FPV Set: Kamera, Sender und Antenne
Für den FPV Sender habe ich mir den Boscam TX5823 mit 200 mW bestellt. Nachteil an diesem Sender soll die große Hitzeentwicklung sein. Leider ist der nächstkleinere Sender ein 10-mW-Sender, was mir etwas wenig Leistung ist. Vorteil beim 10 mW: Spart Strom und wird nicht heiß. Schade, dass es keine kleinen 25-mW- oder 50-mW-Sender gibt. Der nächstgrößere ist übrigens ein 400-mW-Sender.
Die 600TVL CMOS Kamera hatte ich noch zu Hause liegen, da ich diese früher als sie erschienen ist einfach mal mitbestellt habe. Getestet habe ich die Kamera noch nicht. Als Antenne nehme ich eine alte 5,8-GHz-Stabantenne. Davon habe ich noch Unmengen rumliegen. Es geht aber auch noch kleiner.
Frame

Als Frame wollte ich ursprünglich den FireFlo v3 nehmen. Dieser ist mir allerdings nach dem ersten Absturz kaputt gegangen. Ich habe den Frame aus PLA gedruckt. Eventuell muss ich mal ein anderes Material ausprobieren, denn ich finde das Design von FireFlo v3 einfach genial. Deswegen habe ich dann spontan einen Hubsan X4 107D Frame gekauft.
Sender für Taranis

Da ich meinen kleinen Racer mit einer Taranis steuern möchte, habe ich mir ein gebrauchtes OrangeRX DSMX/DSM2 Modul gekauft.
Zusammenbau
Der Zusammenbau war nicht wirklich schwierig, da nur wenig Komponenten zusammengebaut werden müssen. Der größte Aufwand war dabei der Bau des FPV Senders.
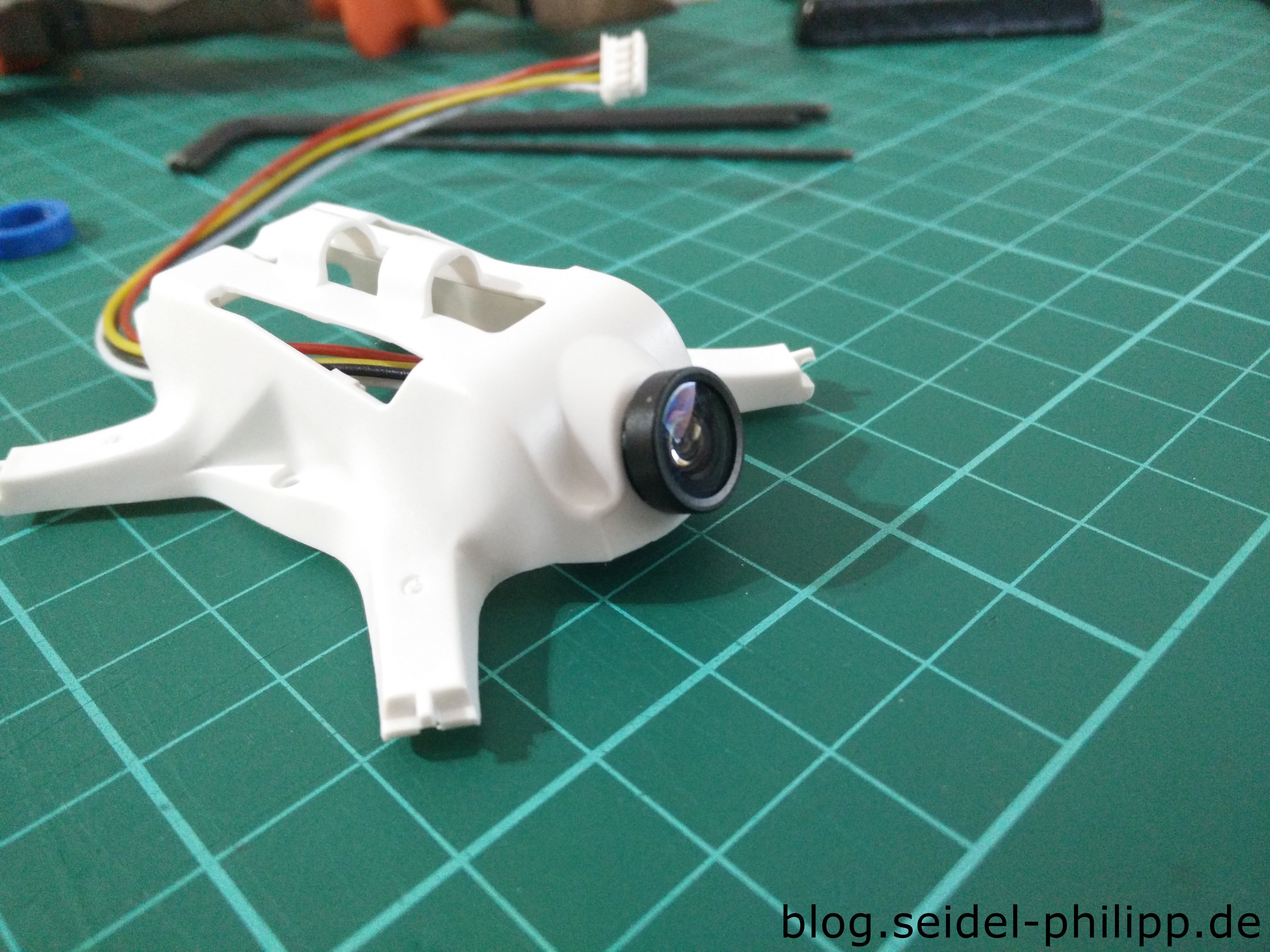
Damit die Kamera in den Hubsan Frame passt muss in der Innenseite etwas von Plastik entfernt werden. Geht am besten mit einem scharfen Skalpell.
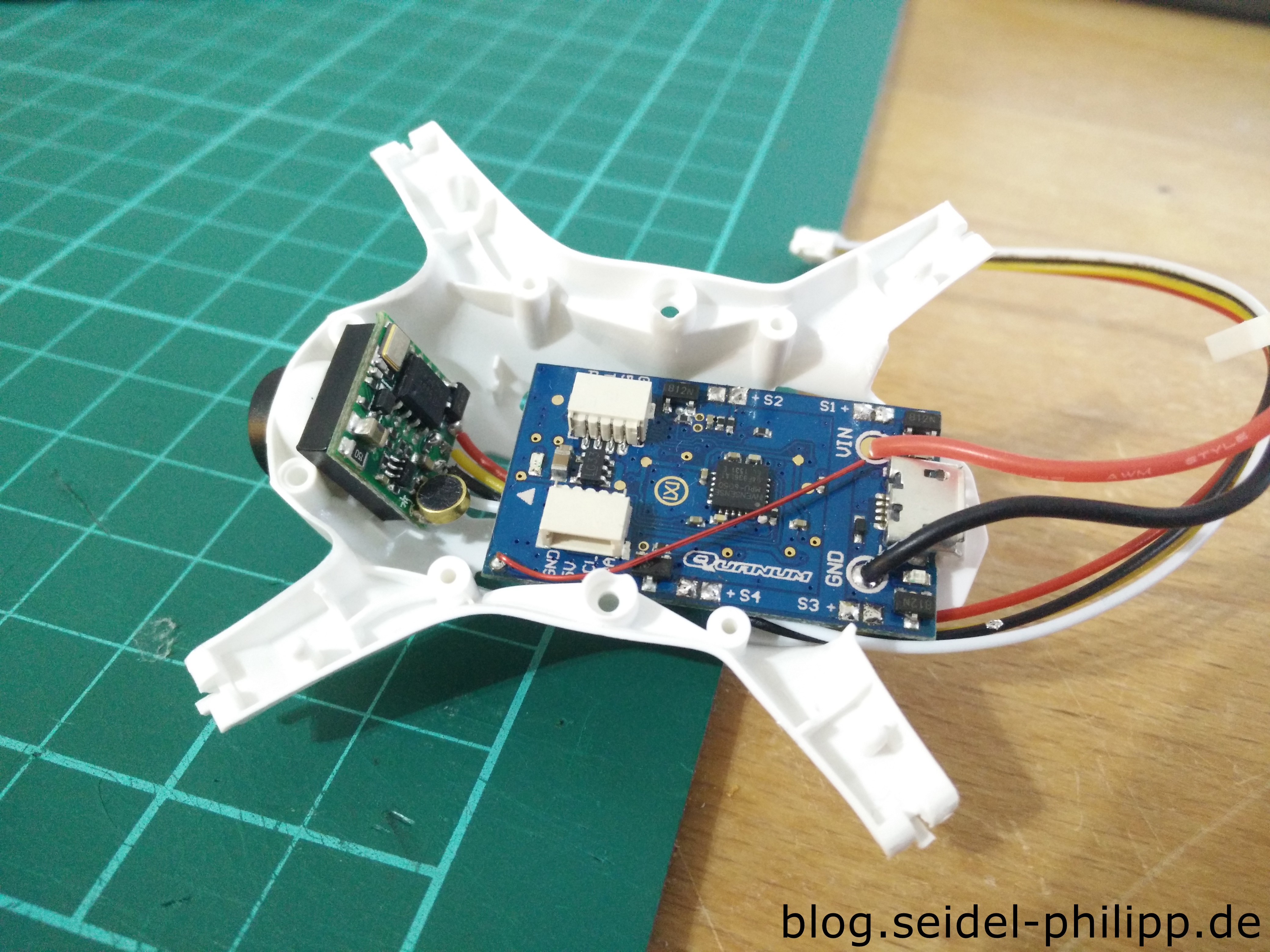
Auf diesem Bild ist das Mikrofon der FPV-Kamera noch zu sehen. Dieses habe ich abgelötet. Befestigt habe ich die Cam mit Heißkleber.
Zusammenbau: FPV Kamera und Sender
Hier die generelle Verkabelung. Kamera und Sender werden direkt aus dem Lipo mit Storm versorgt.

Leider hatte ich beim einschalten der Motoren Störungen im Bild. Nachdem ich einen Polulu S7V8F3 eingebaut habe waren die Störungen fasst weg und ich bin mit der Bildübertragung zufrieden.

Channel einstellen
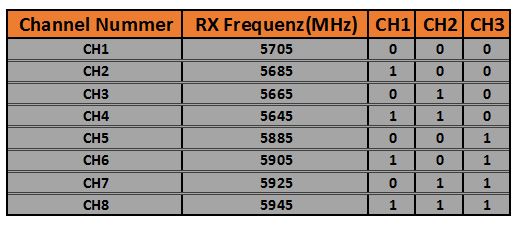
Die Channel werden mithilfe von Lötbrücken festgelegt. Aus der Tabelle kannst du entnehmen wie du löten musst um eine bestimmte Frequenz zu erreichen.
Wir löten immer an den Lötpads CH1/CH2/Ch3 und GND.
Eine 1 in der Tabelle bedeutet, dass der Kontakt von dem CH(X) Pin zu GND nicht besteht. Eine 0 wiederum bedeutet, dass ihr CH(X) mit GND verbinden müsst.
Hier ein Beispiel für die Frequenz 5665Mhz:
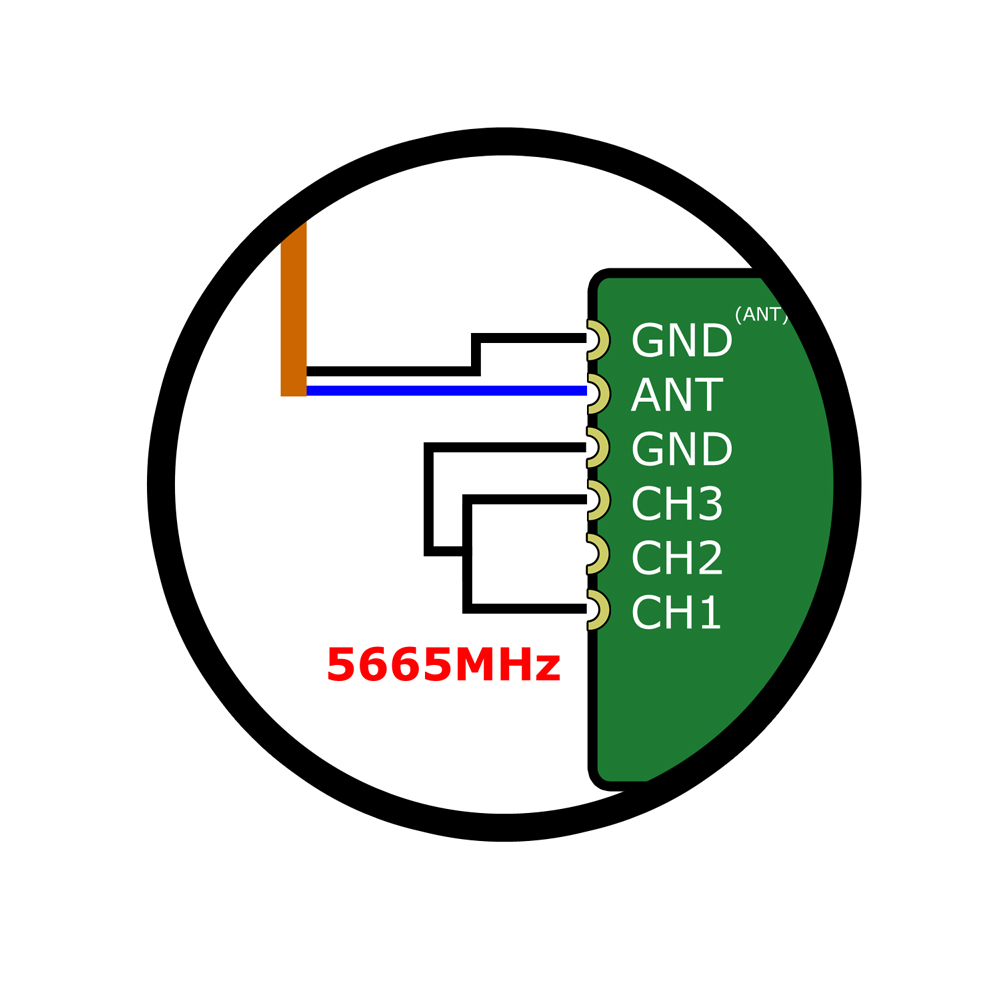
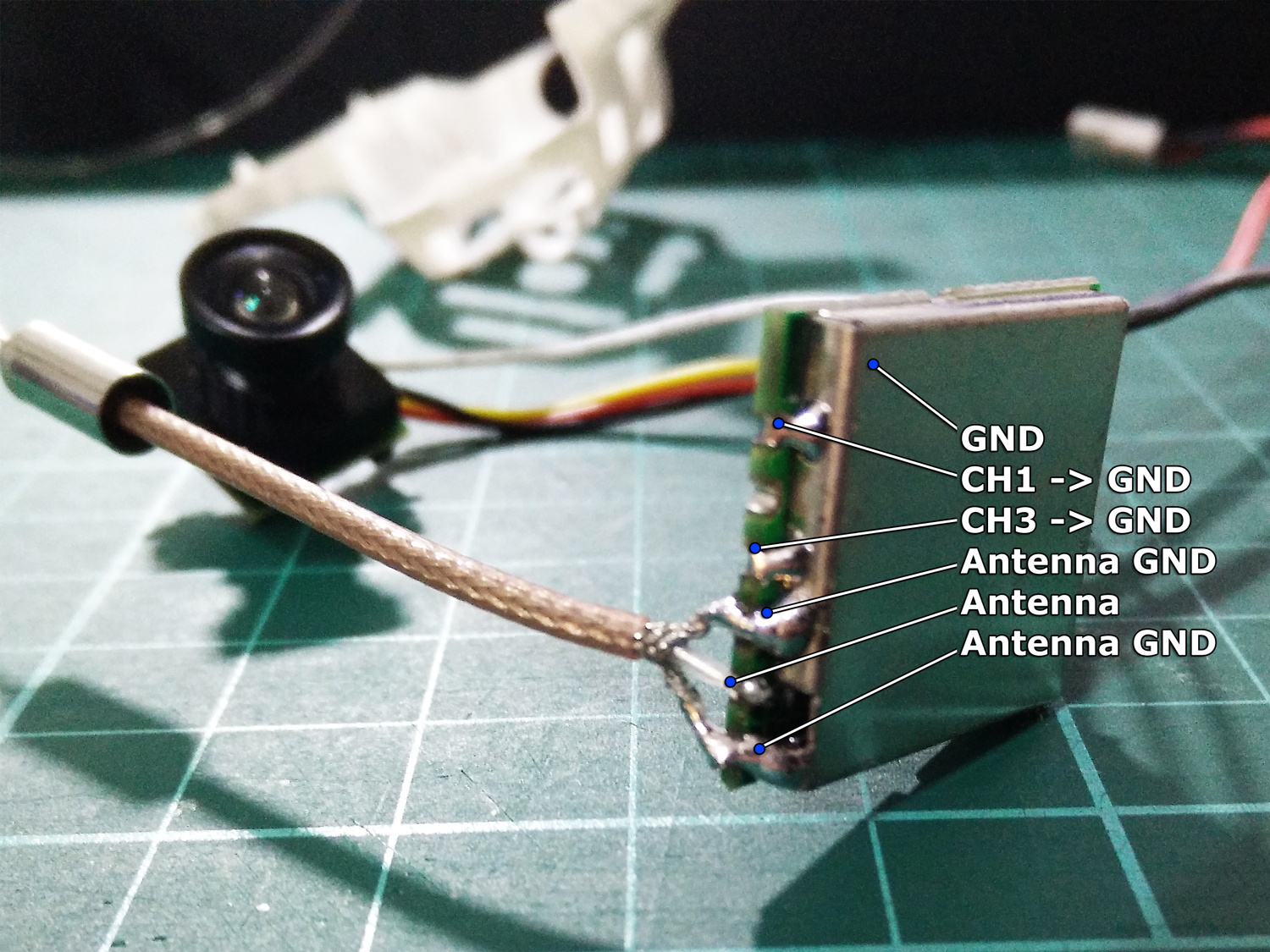
Die Metallrückseite des Videosenders ist übrigens GND. Du brauchst also nur die Lötstellen für den Channel mit dem Gehäuse verbinden.
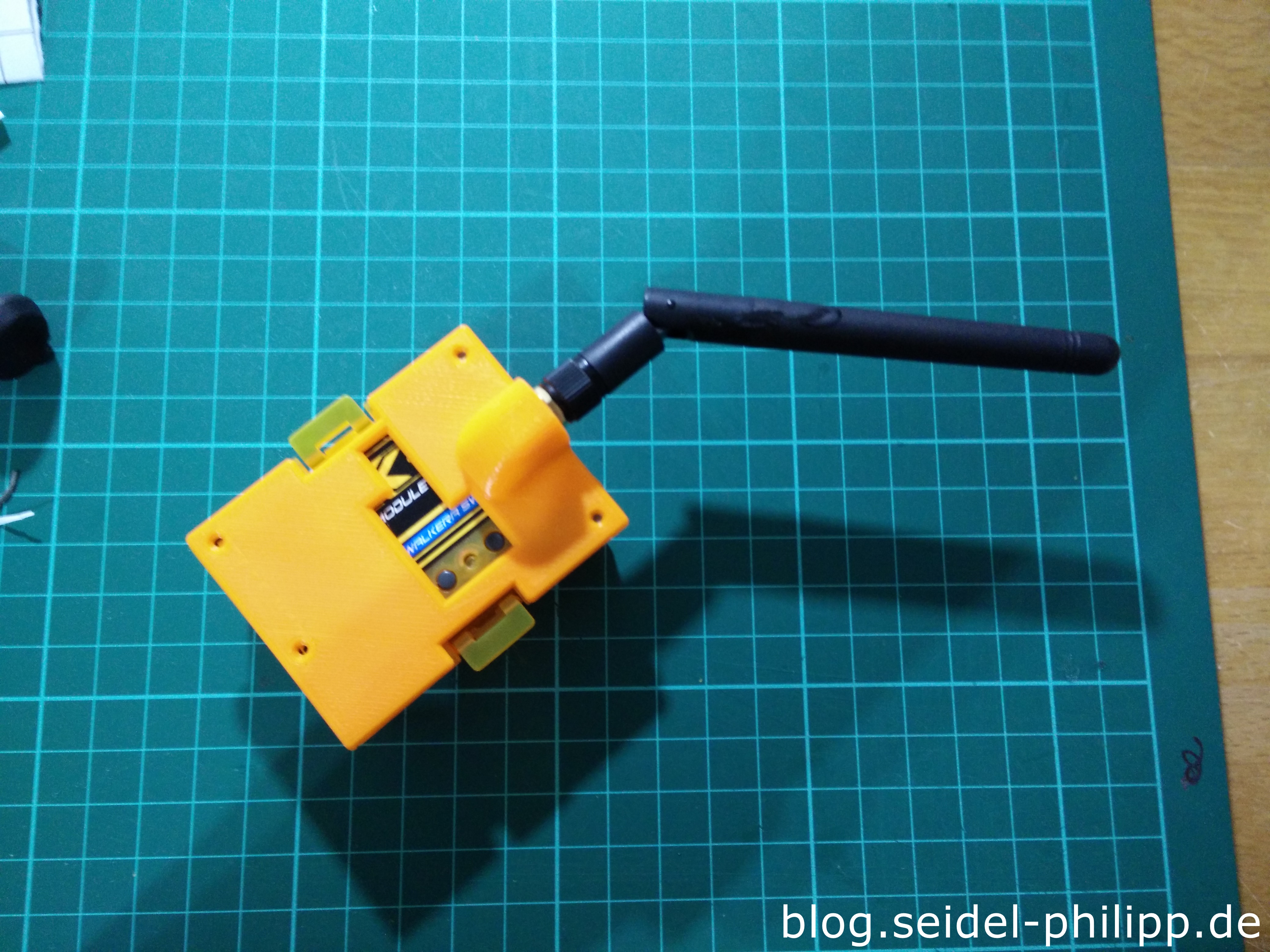
Für das OrangeRX Modul habe ich mir folgendes Teil gedruckt.

Konfiguration Copter
Natürlich muss der Copter auch Konfiguriert werden bevor der erste Flug gemacht werden kann.
Betaflight flashen funktioniert wie bei allen anderen Flugsteuerungen auch. Nach dieser Anleitung kannst du vorgehen.
Meine Einstellungen habe ich exportiert und auch ein CLI Dump erstellt. Du kannst es hier herunterladen und ggf. importieren.
Betaflight Config und CLI Dump für Micro Scisky 32bits/Quanum Pico 32bit
Konfiguration (Betaflight)
Damit die Motoren korrekt angesteuert werden können muss die PWM Auflösung eingestellt werden. Ein guter Wert ist 16000.
Folgendes in der CLI eingeben.
set motor_pwm_rate = 16000 save
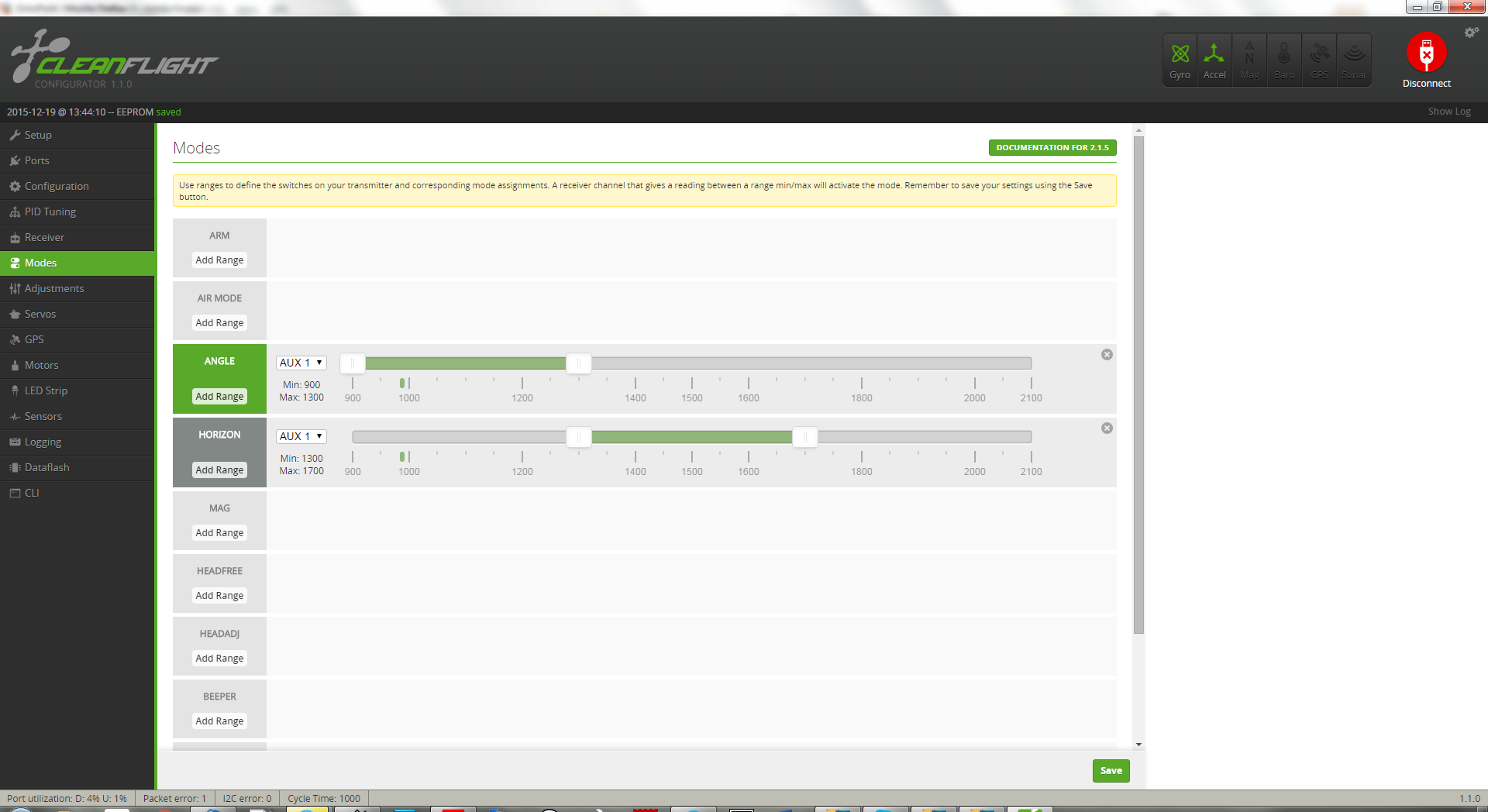
Flugmodi einstellen 😉

Hier muss man den Hacken bei UART2 Serial RX.
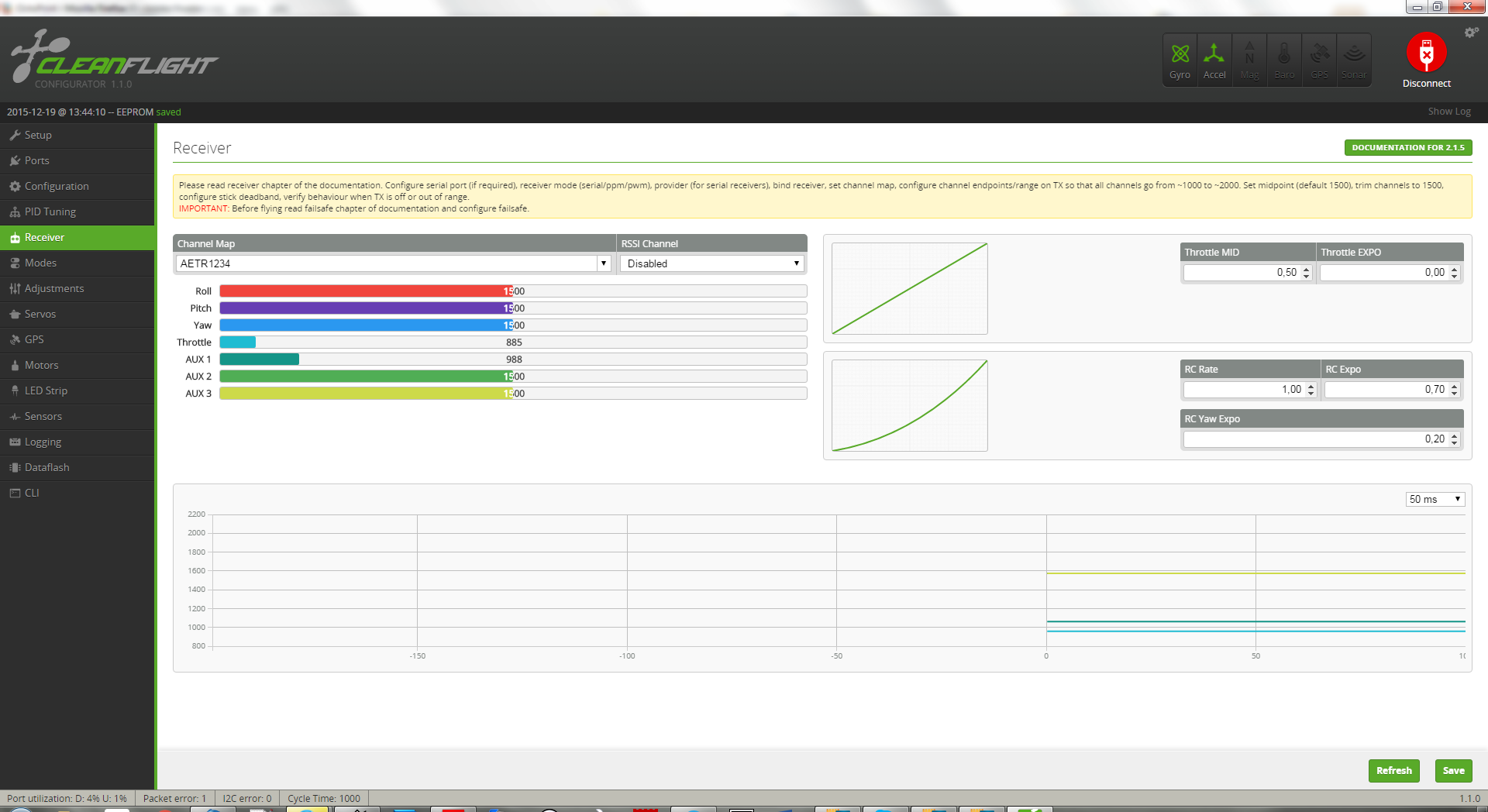
Channelmap ist AETR1234
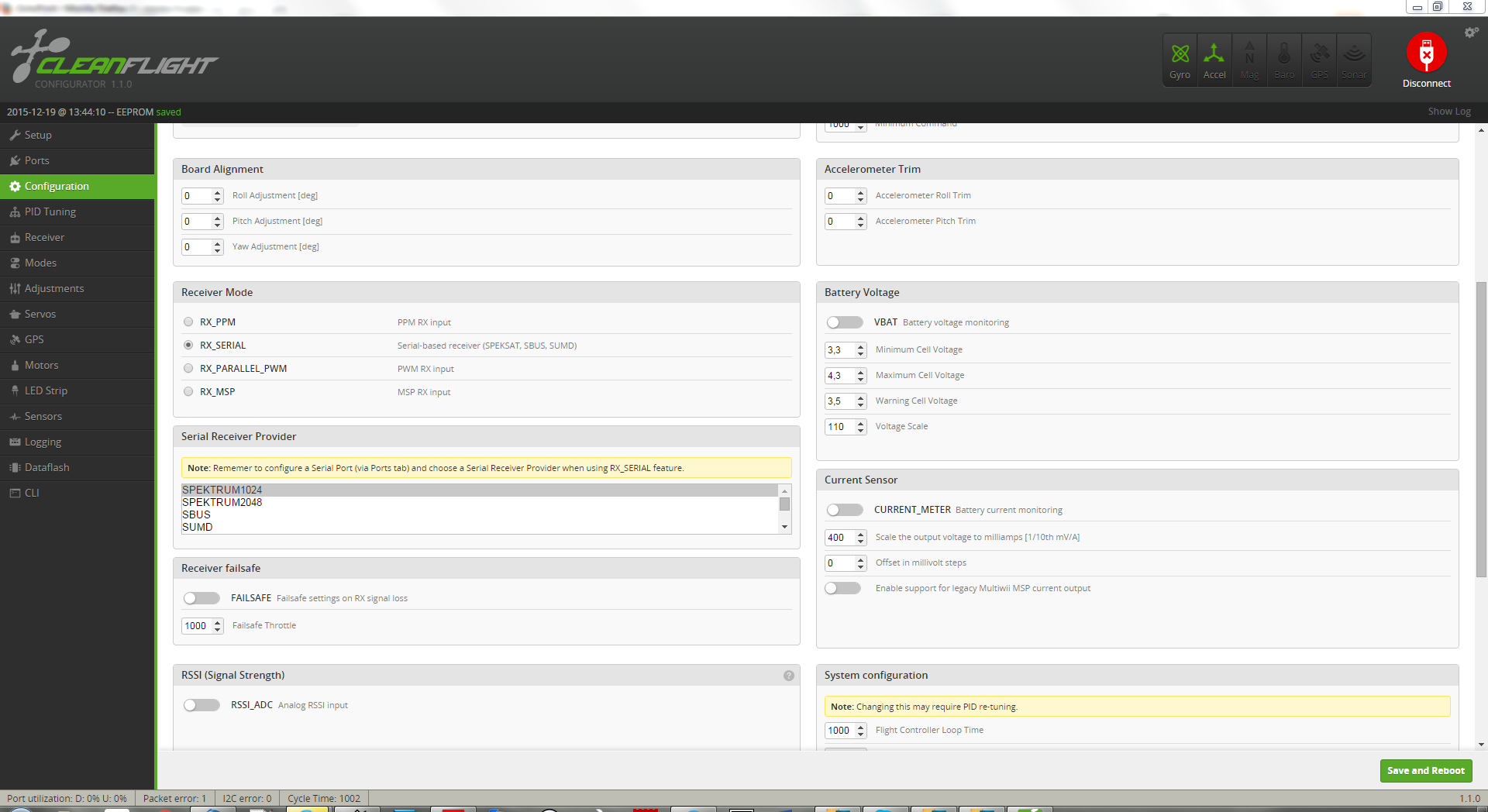
Receiver Mode = RX_Serial
Serial Receiver Provider = SPEKKTRUM1024
OneShot muss deaktiviert werden
Konfiguration Taranis
In der Taranis legt ihr euch ein neues Modell an.
In dem neuen Modell gehst du in die Einstellungen und stellst folgendes ein:
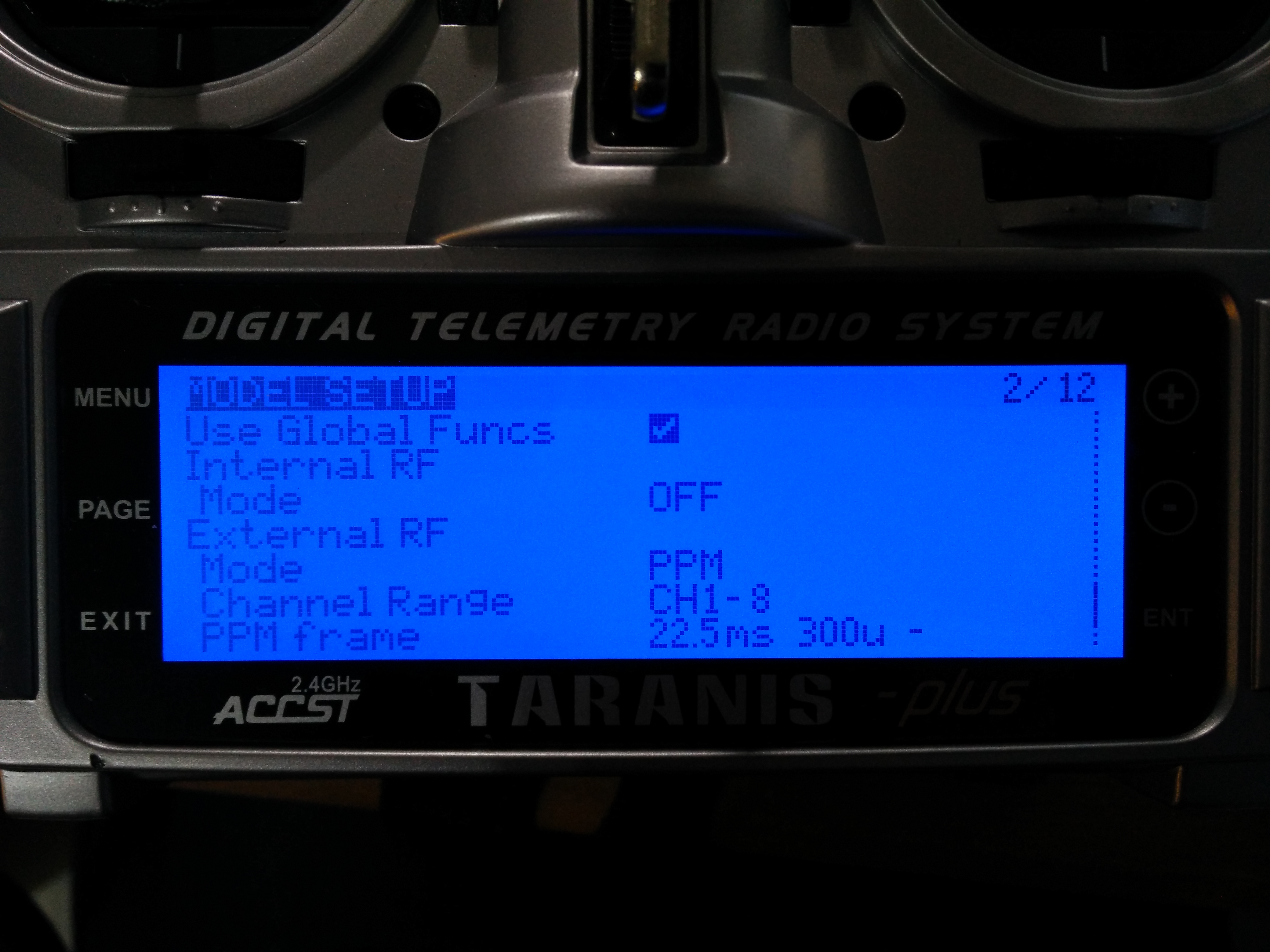
Internal RF = OFF
External RF einschalten
Mode ist PPM
Kanäle 1-8

Auf Seite 5 habe ich folgende Reihenfolge festgelegt.

Auf Seite 6 habe ich noch den 3-Wegeschalter SC auf Kanal 5 gelegt. Damit schalte ich die Flugmodi um.
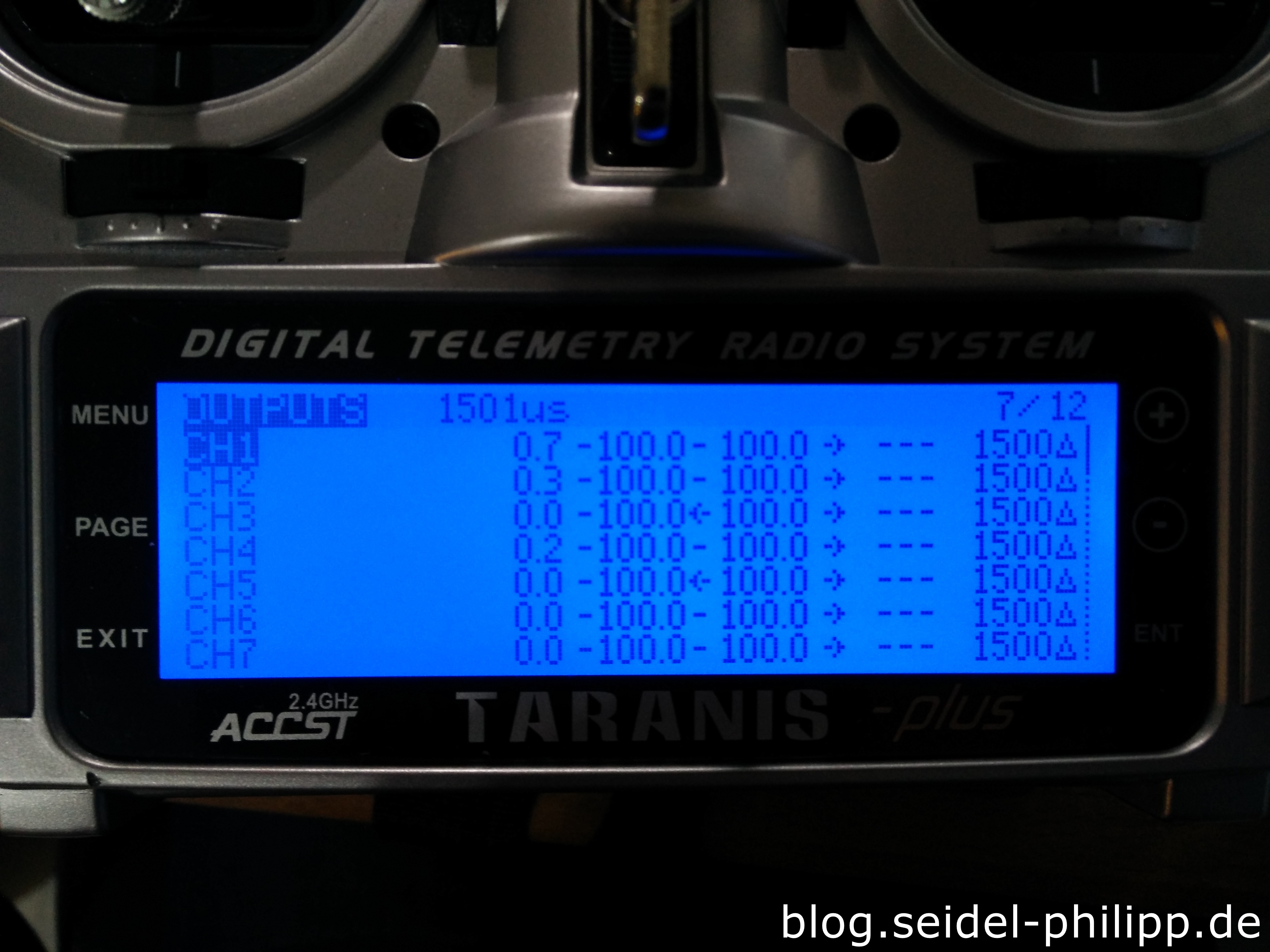
Wie bei jedem anderen Copter auch habe ich per Subtrim die Mitten eingestellt. Dazu musst du die Flugsteuerung anschließen und im Cleanflight Configurator (Tab Receiver) die Werte auf 1500 bringen. Hier auch nochmal nachzulesen.
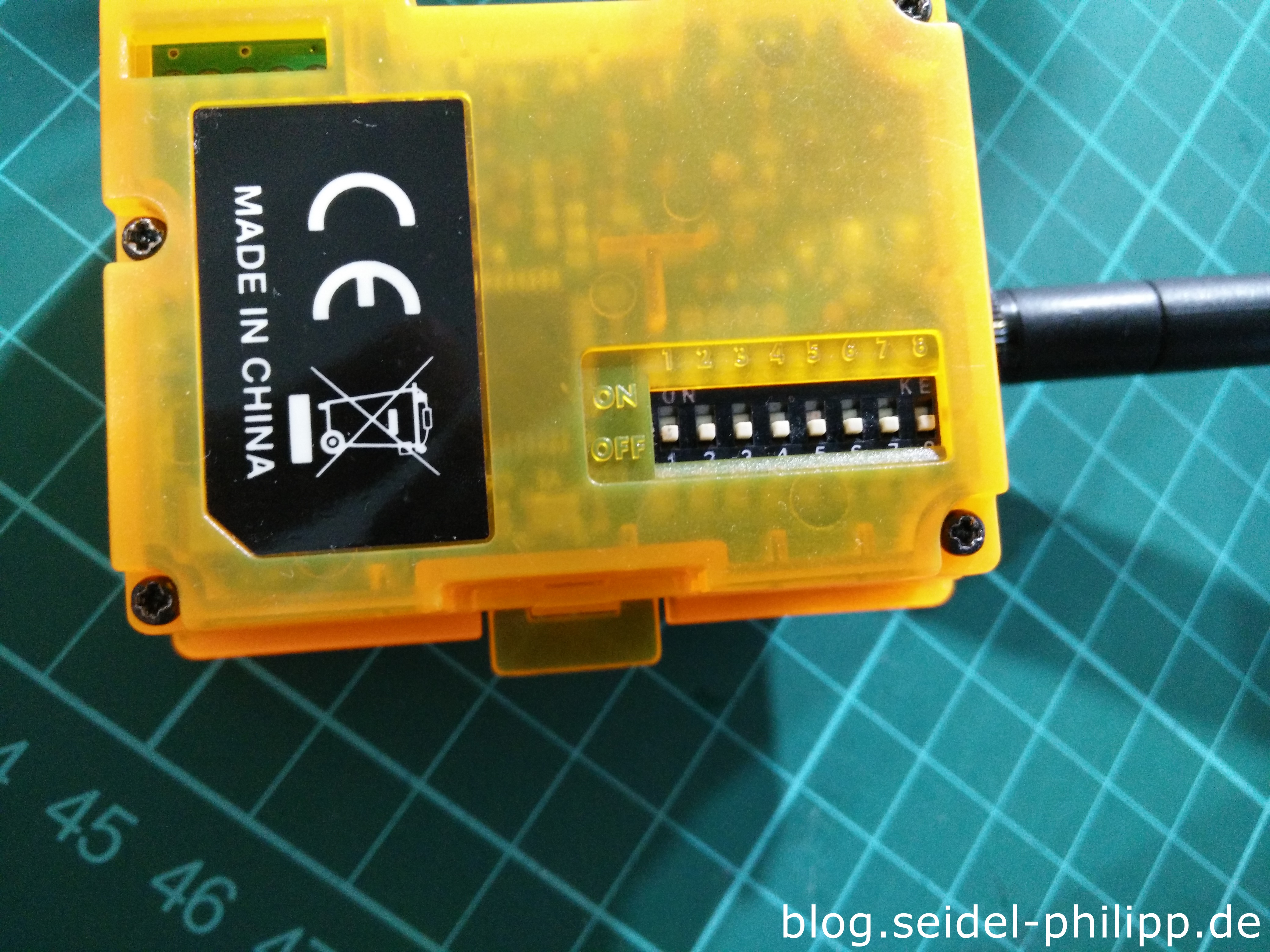
Das Orange Modul muss wie folgt konfiguriert werden.
Weitere Fotos:



Hallo Philipp, vielen Dank für das Build!
Eine Frage. Wenn ich die Funke vom Hubsan nehme (diese kleine glaube sie heisst flysky) wie kann ich die denn an deinen Mikro quadcopter anschließen? Hat das was mit der orange zu tun?
die normalen Hubsan Funken kannst du nicht verwenden, du brauchst eine mit OrangeRX
Hallo Philipp!
Sehr ausführliche und gute Beschreibung! Habe noch eine Frage:
Kann man an den MicroSciSky auch 6 Motoren anbauen, um z. B. einen Hexacopter zu realisieren? Mir gefällt der Controller so gut, weil er so klein ist und den eingebauten DSM2 Receiver hat.
Was ist mit den beiden ungenutzen Steckverbindern für SCA/SCL bzw. RX/TX auf dem Board? Kann man die irgendwie anzapfen?
Oder kennt jemand eine Alternative mit eingebautem DSM2 Receiver und 6 FET-„Endstufen“ zum direkten Anschluß der Brushed-Motoren?
Viele Grüße
Hey Stefan,
nein ein Hexa kann man damit nicht bauen. An die übrigen Anschlüsse kannst du aber zum Beispiel WS2812 LEDS anschließen.
Gruß,
Phil
Hallo Leute. Habe einen Hubsan X4 zuhause rumliegen und benutze ihn seit längerem nicht mehr, da ich jetzt auf mein erstes 250er Quad umgestiegen bin.
Für den Umbau hab ich jetzt aber eine Frage: Wie kann ich denn meine FlySky FS-i6 Funke für den Receiver des MicroQuads „um/aufrüsten“ habe das mit dem Orange RX nicht ganz herausgefunden.
Danke für die Hilfe im Vorhinein
Hey Philipp,
jetzt habe ich auch den Micro Quad gebaut (Fire Flo V3)
Nur macht die Scisky nicht richtig mit. Sie lässt sich einfach nicht flashen. Hatte vor Betaflight zu flashen, doch immer kommt Bootloader fehler.
Gewählt habe ich die Naze als Board in der Version 1.12.0 und Betaflight hab ich die betaflight_2.8.0_NAZE geladen.
Muss mann hier auch etwas auf dem Board brücken um zu flashen? oder hat man die Baud rate gesondert ein zustellen?
Viele Grüße
Versuch es mal bitte mit Betaflight 2.6.x
Bei den neuen kommen im Moment heufiger diese Fehler.
Falls das nicht klappen sollte, ggf anderes Kabel. Hatte das Problem auch und connecten ging auch nicht. Bei meinen anderen FCs funktioniert es. Erst beim Kabelwechsel lief alles reibungslos.
Hallo,
erstmal danke für diese geniale Anleitung. Die habe ich jetzt nachgebaut, aber über ein Problem stolpere ich, was ich irgendwie bei der kleinen nicht gelöst bekomme. Sobald ich starten will, kippt der Copter im Stand sofort hinten über, als wäre zuviel Gas auf den vorderen 2 Motoren. Ich habe schon gecheckt, ob die Motoren passend auf dem FC angelötet sind, Drehrichtung ist geprüft und auch die Propeller habe ich nochmals gecheckt. Irgendwie gehen mir die Ideen aus und vielleicht hat einer von euch noch einen Geistesblitz. 😉 Ach ja, konfiguriert habe ich den FC über deinen angebotenen Dump.
Hey,
hört sich vielleicht doof an, aber es ist meistens ein Falsch drehender Propeller. Check das nochmal. Ansonsten kannst du versuchen im Acro Modus zu starten um auszuschließen dass der Fehler im Levelmodus liegt. ACC hast du aber kalibriert?
Hi Phil,
so doof ist das gar nicht. Das war nämlich das Problem meines damaligen ersten Copters. 😉 Drehrichtung ist meiner Ansicht nach richtig. Motor 4 (lo) und 1 (ru) rechts drehend, 3 (lu) und 2 (ro) links drehend.
Es ist egal in welchem Modus ist starte. Im Acro wirbelt er heftig umher und bricht nach allen Seiten weg. Beim Horizont überschlägt er sich wenigstens immer nach hinten. ACC hatte ich kalibriert. Aber der FC liegt nicht 100%ig gerade im Frame. Könnte es evtl das sein und wie hast Du den befestigt? Heisskleber? Die Propeller habe ich auch nochmals gecheckt. Alle passend zur Drehrichtung. Ach ja, er hebt gar nicht erst ab. Sobald genug Schub da ist, überschlägt er sich sofort.
Okay, kannst du die Motoren denn per Cleanflight ganz normal hochfahren?
Eventuell passt die PWM Rate nicht zu den Motoren. Hast du das schonmal gecheckt. Hatte ich auch im Beitrag etwas zu geschrieben.
PWM habe ich den von Dir vorgeschlagenen Wert genutzt, also 16000. Einen anderen Wert habe ich noch nicht getestet, werde ich heute Abend aber mal machen.
Die Motoren kann ich über Cleanfligt gar nicht hoch fahren. Ich weiß nicht ob mein USB genug Saft dafür her gibt. Hatte irgendwo gelesen, dass der FC nicht gleichzeitig am USB und per Akku betrieben werden darf, da die Spannung zu hoch wäre.
Betreibe jetzt mein FX758 direkt vom 5v Pad an der SciSky und habe damit das beste Ergebnis. http://community.micro-motor-warehouse.com/t/scisky-brushed-fc-community-sourced-documentation/798
Keine Störungen – Kein LC Filter oder StepUp/StepDown notwendig!
Ich habe meinen Micro jetzt auch fertig. Und ich habe keinerlei Bildstörungen. Was ich gemacht habe ist folgendes: Ich habe mir von Banggood folgenden 3.3V Step-Down geholt: http://www.banggood.com/DC-DC-Step-Down-Module-12V-to-3_3V-Voltage-Regulator-MP2259-Board-p-957356.html .
Das gute an diesem Step-Down ist, dass es extrem klein ist (noch kleiner als die Pololu Dinger), und es hat noch extra Lötpads für das Video Signal was dann gefiltert wird!. Den Step-Down habe ich an die 5V Leitung von dem Scisky angeschloßen und dann an den Tx. Für die Kamera habe ich die andere 5V Leitung vom Scisky genommen. Das gelbe Kabel von der Kamera habe ich am Video Input von dem Step-Down gelötet und vom Video output Lötpad des Step-Downs habe ich ein Kabel verlegt was zum Video Pad des Tx verläuft. Und voilà super Bild ohne Störungen.
Klasse, danke für den Tipp
Hi Phil,
was hat es eigenltich mit der Motor_PWM_Rate auf sich.
Meiner hat etwas wenig Dampf auf der Brust mit den MMW Dark-E und nem 750mah bei 66g.
Hatte beim Einstellen auch etwas Probleme mit meinen Min/Max Werten das die von 1000-2000 passen.
Meine motor_pwm_rate ist bei 32000. Könnte erhöhen/verringern etwas ausmachen. Könnte ich mir mit bsp. mit einem Wert von 16000 was kaputt machen xD ?
Greetz&Cheers
Jan
Hallo Jan,
Motor_PWM_Rate gibt quasi die Auflösung der Ansteuerung der Motoren an. Höhere Werte steuern die Motoren feiner an. Das musst du für jeden Motor selber testen. Mehr Power solltest du dadurch nicht bekommen.
Das liegt denke ich an dem schweren LiPo. Würde maximal 500mah zuladen oder besser bei 300mah Turnigy Nanotech bleiben.
Ich hab mir auch einen kleinen Copter nach der Bauanleitung gebaut. Hat alles soweit geklappt, hatte aber sobald ich Gas gegeben hab kaum mehr was sehen können. Hab dann den empfohlenen Stepdown zwischen Akku und VTX gelötet, was aber auch nicht wirklich geholfen hat. Ein störungsfreies Bild habe ich erst seitdem ich vom Scisky 5V abgreife und mit denen durch den Stepdown den VTX und Cam versorge.
Habe mit meinem Board derbe Probleme. Zunehmend stärker werdender Drift in Angle/Horizon. Nach 2 min ist der unfliegbar. Landen, gyro kallibrieren per stick und dann ist in den ersten 30 sek wieder alles gut bis der Drift rapide zunimmt. Hat das jemand auch?
Passiert übrigens auch wenn das Board einfach still auf dem Tisch liegt. Motoren aus. Der Roll Offset in cleanflight wächt dann selbstständig bis dieser bei etwa 3 Grad ist. Habe betaflight, CF-RC2 und inav probiert. überall das selbe…
Hallo Albert,
das hört sich nicht gut an. Also mit der Stock Firmware (sei es Cleanflight oder Betaflight) sollte, ohne etwas eingestellt zu haben nichts driften in der GUI.
Hört sich nach einem defekten Gyro an.
Phil
Hi Albert, hab exakt das selbe Problem! Der driftet bei mir nach rechts. Wenn ich es in Cleanflight anschließe und kalibriere dann ist der bei 0grad in roll und Pitch. Aber mit der Zeit neigt der sich immer weiter nach links bis hoch zu über 3Grad obwohl ich es die ganze Zeit nicht anfasse…
Mit dieser version von CF habe ich es in den Griff bekommen. CF: 1.11.0; Board: ALIENWIIF1 (nicht naze nehmen). Alles andere brachte leider keine Besserung.
Hallo Albert
Vielen Dank für diesen Tipp. Habe dasselbe Problem und wusste nicht mehr weiter. Nun habe ich aber das Problem dass die Motoren einfach starten sobald ich den LiPo anschliesse. Hab die PWM Rate auf 32000 angepasst und es passiert trotzdem noch. Ich benutze ein Orange Modul mit der Taranis. Hast du hierzu vielleicht eine Lösung?
Guckt mal in der CLI nach, ob der Wert wirklich geändert worden ist.
hab ich, ist geändert.
ich habe es nun mit 40k, 32k,16k, 10k und 8k versucht. leider erfolglos. receiver ist gebunden.
es scheint an etwas anderem zu liegen, hat jemand noch ne Idee? Gruss
Hey Leute,
ein Kumpel hat das selbe Setup und benutzt diesen StepUp.
http://de.aliexpress.com/item/Free-Shipping-5pcs-lot-New-1A-3V-to-5V-DC-DC-Converter-Step-Up-Boost-Module/1728894115.html
Ich werde berichten ob das klappt. Habe mir mal ein paar bestellt. Die Teile findet man auch auf ebay oder Banggood. müsst ihr einfach nach dem Aussehen gehen.
Phil
Habe den kleinen soweit fertig und bin ganz zufrieden. Ohne FPV-Kram lag ich bei ca. 5 Minuten Flugzeit mit einem 500mah Akku. Nun, wo die Cam, TX und StepUp drin sind, komme ich auf höchstens 3 Minuten. Das merkwürdige ist, dass vorher der Quad langsam zu Boden ging wenn der Lipo leer war – nun geht einfach alles mitten im Flug aus (alle Lichter aus) = sehr uncool! Habe bereits dadurch ein Motor geschrotet (durch den Aufprall). Manchmal geht er aber auch nach 30 Sek einfach aus und ist nur durch Ab- und Wiederanspöpseln des Lipos wieder da. Passiert das bei euch auch so?
Ach ja: Gesamtgewicht ist jetzt mit einem 500mah Lipo 55g
Das könnte daran liegen, dass der Stepup zu viel saft zieht. Das geht bei mir auch recht schnell.
ich bin derzet noch auf der Suche nach dem besten Stepup. Ich habe aber auch noch einen anderen videosender bestellt.
Heute ein erstes Erfolgserlebnis gehabt. Habe den Pololu 5V Step-Up Voltage Regulator U3V12F5 ausprobiert. Auch wenn das TX5823 bei 5v recht heiss wird, sind die Bildstörungen zu 98% weg. Nun kann ich ein gutes Videobild sehen. Ist ein Unterschied wie Tag und Nacht. Werde TX5823 noch eine 1N4001 Diode davor löten damit das Modul etwas entlastet wird. Dann hätte es eine Spannung von 4.3V und wird hoffentlich nicht mehr ganz so heiß.
Vielen Dank für die Info! Dachte, dass der TX5823 nur mit 3,3V betrieben werden darf. Bitte berichte ob es mit der Diode besser ist. Würde mich auch interessieren was für eine Diode man da nimmt und wo man diese genau drauf löten muss.
Ja, laut Beschreibung darf er nur 3.3V, aber 5V machen ihm nichts aus.
Ich teste derzeit mit einem Stepup auf 5V damit die Störungen endlich verschwinden.
Betreibe jetzt mein FX758 direkt vom 5v Pad an der SciSky und habe damit das beste Ergebnis. http://community.micro-motor-warehouse.com/t/scisky-brushed-fc-community-sourced-documentation/798
Keine Störungen – Kein LC Filter oder StepUp/StepDown notwendig!
Also die Kombi aus Pololu 5V SetepUp NCP1402 und 3.3v StepDown (LDO) hat bei meinem Syma schon mal leider keine Besserung gebracht. Wenn die Motoren hochdrehen, kann ich das Videobild höchstens erahnen. Übrigens habe ich gelesen, dass der FX758 besser für brushed Motoren geeignet sein soll. Warte nun auf weitere Komponenten zum Testen….
Habe jetzt auch parallel diesen filter bestellt um vergleichen zu können. http://www.csgshop.com/product.php?id_product=135
Werde also beides ausprobieren: diesen Filter oben und die Aneinanderreihung von einem 5v SetepUp (Switched) und 3.3v StepDown (LDO). Mal sehen ob es was bringt.
Die Ultimative Lösung scheint diese zu sein: http://www.getfpv.com/altituderc-nano-25mw-5-8ghz-fpv-video-transmitter.html Hier ist wohl ein LC-Filter bereits einbebaut. Finde es aber ehrlich gesagt zu teuer.
Habe das projet mit einem Syma x11 nachgebaut. Leider sind die Störungen im FPV Bild so stark, dass es nicht fliegbar ist. Auch der Polulu S7V8F3 bracht nur kaum Besserung. Irgend eine bessere Idee um die Störungen rauszufiltern?
Ja, bei mir sind teilweise auch noch Störungen im Bild, bin auch noch nicht ganz zufrieden.
Ich versuche es mal mit einem anderen stepdown oder einem LC filter.
Hast Du einen Tipp für einen lc filter der in das Gehäuse noch reinpasst?
Hi Albert,
du kannst dir für super wenig Geld einen eigenen Lc-Filter bauen nach dieser Anleitung. Der LC Filter kostet <2€ und ist kaum größer als eine Centmünze. https://fpv-team.de/blog-aktuelles-news/entry/videouebertragung/mini-lc-filter-fuer-nanocopter
Danke, die Anleitung kenne ich, ist aber leider zu groß für ein Hubsan X4 oder Syma X11. Irgendetwas im Formfaktor des Polulu S7V8F3 wäre optimal. Versuche jetzt mal ein 5v step up up und einen 3.3 step down Modul hintereinander zu schalten. Hinweis von hier: http://forum.mikrokopter.de/topic-post456607.html#post456607
Folgende Teile sind bestellt.
5v step up: http://www.watterott.com/de/Pololu-5V-Boost-Regulator-NCP1402
3v step down LDO: http://www.ebay.de/itm/201436004099
Ich werde berichten.
Bin gespannt. 🙂
Hier noch eine interessante Alternative: http://www.csgshop.com/product.php?id_product=135
Ulala. Das sieht sehr klein aus. 🙂 cool
Oder noch kleiner:
http://de.farnell.com/murata/bnx025h01l/filter-powerline-aec-q200-25v/dp/2494142
Ist nur der Chip. Einfach direkt anlöten. Hätte mal Lust das auszuprobieren.
Ich denke, so einen LC-Filter werde ich mit auch bauen.
Hi Phil,
gibt es einen Grund warum du einen Step Up/Step Down Regler genommen hast und nicht nur einen einfachen Step-Down Regler wie diesen Pololu 3.3V Step-Down Regulator: http://www.exp-tech.de/pololu-3-3v-300ma-step-down-spannungsregler-d24v3f3
Bitte vergiss nicht meinen Post weiter oben über den Vtx. Habe mir jetzt alles bestellt und würde mich echt interessieren wo du die ganzen Komponenten platziert hast.
Lieben Gruß
Ich hatte das Teil noch rumliegen bin aber noch nicht zufrieden mit dem „Filter“.
Bilder werde ich noch nachreichen.
Hi vielleicht könntest du es ja mit diesem DIY Mini Lc-Filter versuchen und berichten.
https://fpv-team.de/blog-aktuelles-news/entry/videouebertragung/mini-lc-filter-fuer-nanocopter
Welche Motoren sind denn empfehlenswerter?
Würde für meinen Sohn gleich alles in einem Rutsch bestellen wollen.
Gibt es solche Micro-FCs auch mit Gyro/Magnetometer zur Stabilisierung ?
Hey,
ich habe mir die 8x20mm black insane Motoren von micromotorwarehouse gekauft.
Das quanum board hat gyro mit an board. Ist quasi ein naze32 klon.
Ein Magnetometer brauchst du in der Regel nicht. 😉
Das klingt interessant. Was für Außenmaße hat der Copter dann und wieviel hast Du ohne Fernsteuerung investiert?
Ich habe mal nachgemessen:
Diagonale von Rotor zu Rotor sind 90mm. Mit Propellern sind es ca 12cmx10cm.
Schau einfach mal die Produktliste durch, da habe ich alles aufgeführt. Allerdings habe ich mir nun bessere Motoren bestellt, da die Hubsan Motoren etwas schwach sind. Deswegen werde ich an dem Teil sicherlich noch viel herum basteln.
Beste Grüße,
Phil
Hi, super Anleitung – dann brauche ich mir das nicht selber aufschreiben 🙂
Eine Sache die Ich nun schon 2 mal vergessen habe und vielleicht auch erwähnt werden sollte- bei Betaflight ist schon eine Weile OneShot 125 als Standard gesetzt – muss auf aus, sonst drehen die Propeller immer
Grüße Clemens
Hey Clemens,
Werde die OneShot Einstellung ergänzen. 😉 Danke.
Phil
Hi Phil,
Danke für die super Anleitung. Könntest du mir noch den Bind Prozess mit dem OrangeRX und dem DSM beschreiben? Einfach den Lipo anschließen und die Bind taste am Modul betätigen? Und wo hast du den OrangeRx Modul gekauft?
Hey,
du musst am Orange Modul den Bind Knopf halten und dann dir Funke einschalten. Den Copter vorher einschalten. Dann verbinden sie sich.
Erneutes binden ist nicht notwendig, er wird dann immer wieder erkannt.
Habe das Modul gebraucht gekauft. Du kannst das Modul aber bei Hobbyking beziehen.
Hi Phil,
fohes neues Jahr!
Ich habe da noch eine Frage wo hast du den Tx inkl. Antenne platziert?
Hast du evtl. ein Foto von dem Quad inkl. dem Tx?
LG
Hallo Phill,
das sieht interessant aus! habe meine Hubsan auch schon eingiemal umgestalltet.
ich vermisse die angaben zum verwendete receiver?! bin ich blind oder steht das nirgens?! ein zwei bilder von der vom copter mit der verbauten Technik wären schön!
Sieht nämlich cool aus das Projekt!
die Kamera habe ich auch schon geflogen. Fande aber den Fischaugeneffekt zu ausgeprägt. bei Lageänderung des Copters veränderte sich auch immer meine Wahrnehmung des Abstandes zum Boden bzw. zur Umgebenung. Fand die kaum fliegbar…. mit 110° statt 170° fänd ich die Cam sicher tauglicher…
gruß Peter
Hey Peter,
unter dem Punkt „Flugsteuerung“ habe ich doch etwas zum Empfänger geschrieben. Das Board hat einen DSM Empfänger integriert.
110° macht mehr Sinn, das stimmt, hab ich aber leider gerade nicht da. Mit den 170° komme ich trotzdem ganz gut klar.
Phil