
Handbuch: Cleanflight Configurator (Naze32)

ACHTUNG: Neues Betaflight Handbuch!
Klicke auf das nachfolgende Bild um zu dem neuen Handbuch zu gelangen!

In diesem Handbuch möchte ich euch so gut es geht die alternative Firmware Cleanflight vorstellen. In dieser Anleitung beziehe ich mich nur auf die Naze32 Flugsteuerung.
![]()
Alles was ihr hier lest und daheim ausprobiert geschieht auf eigene Gefahr. Sichert immer eure Einstellungen, macht Backups und seid vorsichtig beim flashen.
Ich übernehme keine Haftung für eventuelle Schäden die durch diese Anleitung entstehen.
Wichtig: Sobald ihr Einstellungen an Cleanflight ändert, flasht oder konfiguriert, schraubt bitte IMMER ALLE Propeller ab.
Inhaltsverzeichnis
Handbuch zum Download:
Dieses Handbuch kann als PDF herunter geladen werden.
Download alte Version: Handbuch zum Cleanflight Configurator v 0.61
Download neueste Version: in Arbeit
Was ist Cleanflight?
Cleanflight ist eine alternative Firmware für diverse Flugsteuerungen (Flightcontroler – FC) wie die Naze32. Die Firmware unterstützt Quadcopter, Hexacopter, Octocopter, Tricopter und Flächenmodelle. Cleanflight stammt von der 8 Bit MultiWii bzw Baseflight Software ab ist Open Source , das heißt der Quellcode ist offen. Cleanflight bietet alle Funktionen wie Baseflight, darüber hinaus aber noch viele weitere nützliche Funktionen wie OneShot ESC Unterstützung, steuerbare LEDs oder das fliegen mit einem Sonar zur Höhenkontrolle.
Installation
Der Cleanflight Configurator kann nur als App mit dem Chrome Browser genutzt werden. Nach der Installation verhält sich die App wie jedes andere Programm und erstellt eine Verknüpfung auf dem Desktop.
Schon gewusst?

Cleanflight läuft in jedem Chrome Browser als App und zwar unabhängig vom verwendeter Betriebssystem. Ob Linux oder Windows spiel keine Rolle.
Schritt 1: Chrome herunterladen und installieren
Schritt 2: Cleanflight Configuratpor installieren
Starte den Chrome Browser und ruf diese Seite auf:
https://chrome.google.com/webstore/detail/cleanflight-configurator/enacoimjcgeinfnnnpajinjgmkahmfgb

Klicke nun auf „APP STARTEN“.
Nun ist der Configurator installiert. Wenn keine Verknüpfung installiert wurde könnt ihr diese in Chrome unter „APPS“ mit einem Rechtsklick auf den Cleanflight Symbol auswählen.
Treiber installieren
Installiert folgenden Treiber: Silicon Labs CP210x USB to UART
Nachdem der Treiber installiert und das Naze32 mit einem USB-Kabel mit dem PC
verbunden ist müssen wir noch herausfinden unter welchem COM-Port der naze32 verwendet werden kann.
Ruft den Gerätemanager auf:
Win 7: „Start“ -> „Systemsteuerung“ -> „Hardware & Sound“ -> „Gerätemanager“ -> „Anschlüsse (COM & LPT)“
alternativ per „Ausführen“: „Windows-Symbol Taste + R“ -> „devmgmt.msc“ eingeben und „OK“ drücken
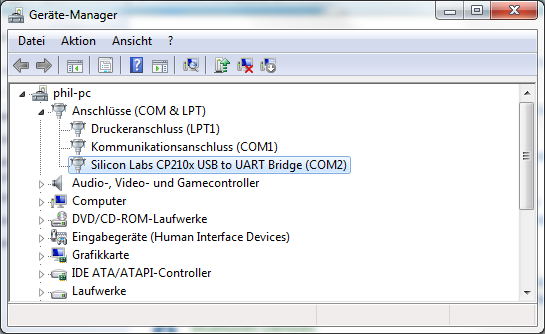
Hier sehen wir nun dass unser Naze32 auf COM-Port 2 ansprechbar ist.
Firmware flashen
Um Cleanflight nutzten zu können muss eine andere Firmware auf die Flugsteuerung geflasht werden. Viele trauen sich nicht an das flashen heran. Besonders bei der Naze32 ist das flashen sehr einfach und man kann fast nichts falsch machen. Die Naze32 benötigt lediglich ein USB Kabel.
Startet Cleanflight Configurator und verbindet eure Naze32

Cleanflight Firmware Flasher
Schritt 1: Wählt den korrekten Port sowie Baudrate (11500) aus.
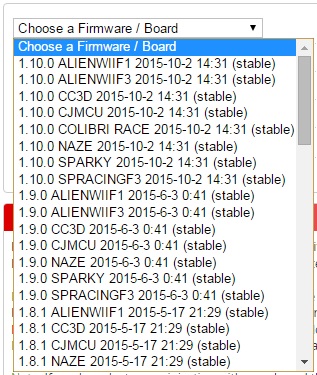
Schritt 2: Klickt auf „Firmware Flasher“ und ihr gelangt in das Menü zum Firmware flashen
Schritt 3: Wählt hier die gewünschte Cleanflight Version sowie Flugsteuerung aus.
Wichtig: Wenn du hier einen falschen Flugcontroller auswählt kann es zu irreparablen Schäden kommen. In der Regel lässt sich aber auch eine falsche Firmware erneut überschreiben.
In unserem Fall (Naze32) wählen wir „1.10.0 NAZE 2015-10-2 14:31 (stable)“ aus.
Auswahl Flugsteuerung
Unter dem Auswahlmenü sollten „No reboot squence“ sowie „Full Chip Erase“ ausgewählt sein
Schritt 4: Klickt nun auf „Load Firmware“ und es wird die ausgewählte Firmware heruntergeladen.
Schritt 5: Als letztes klickt ihr auf „Flash Firmware“. Achte darauf, dass du während des Vorgangs nicht das USB Kabel aus dem Naze32 zieht.
Wenn alles erfolgreich war, könnt ihr euch nun mit dem Cleanflight Configurator verbinden.
Wenn es mit den flashen nicht funktioniert hat und ihr eventuell keine Verbindung mehr herstellen könnt, ist hier eine Anleitung wie ihr das Problem beheben könnt:
https://blog.seidel-philipp.de/naze32-unbrick-hard-reset-anleitung/
Menüs und Aufbau
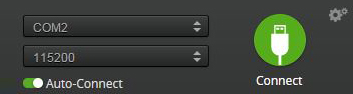
Cleanflight Comport
Hier muss der verwendetet COM-Port eingetragen werden sowie die korrekte Baudrate (Naze32: 115200) Mit dem Button „Connect/Discconnect“ verbindet ihr euch mit dem Naze32. Wenn du einen Haken bei „Auto-Connect“ gesetzt hast, verbindet sich die Software automatisch sobald du die Naze32 mit dem USB Kabel anschließt.
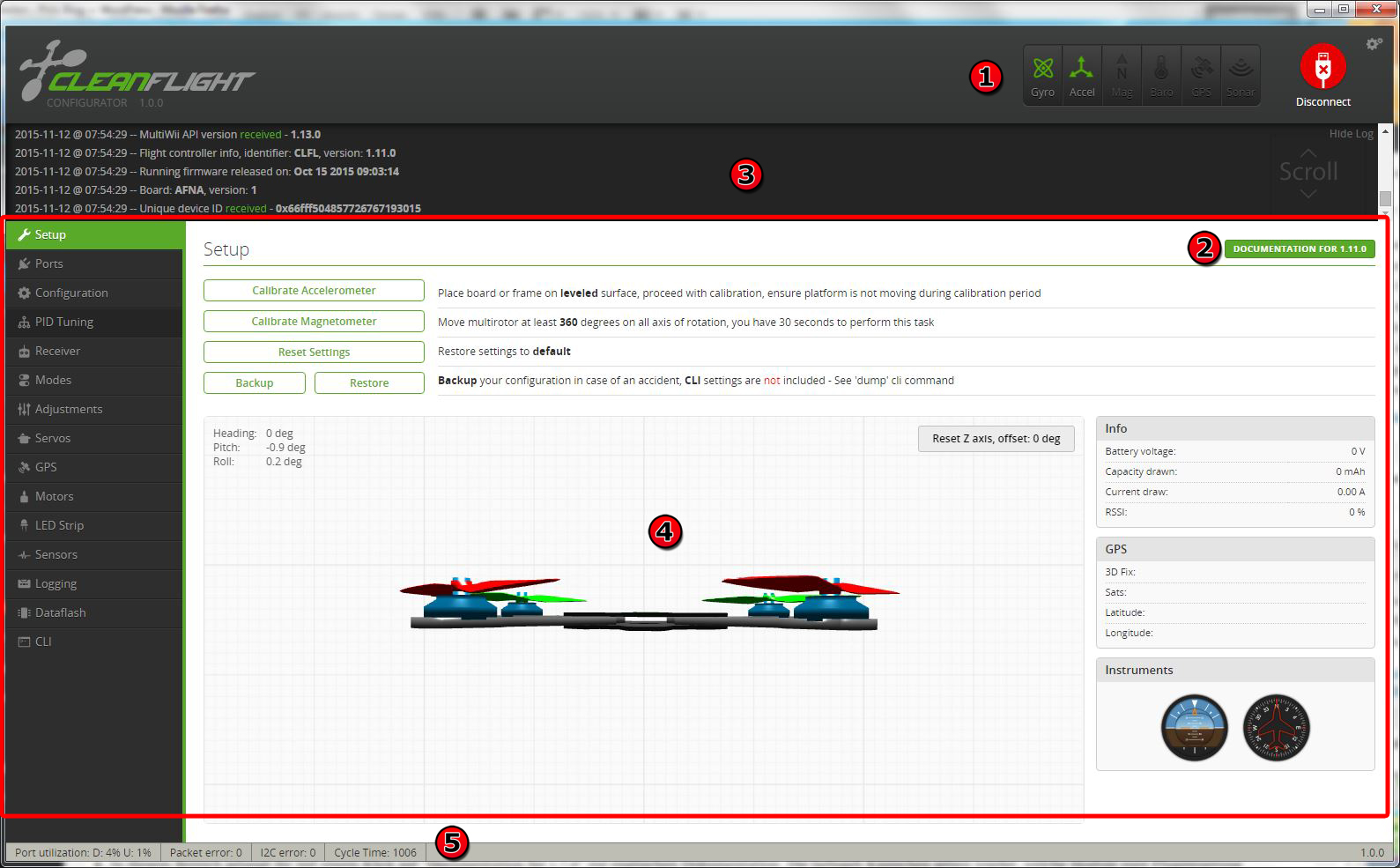
Cleanflight Setup
1. Die farbigen Kästchen geben wieder, welche Module eure Flugsteuerung unterstützt. Das Naze32 Acro Board hat nur Gyroskop/Kreisel (gyroscope) und einen Beschleunigungsmesser (accelerometer). Die Naze32 Full hat zusätzlich noch einen Magnetometer sowie ein Barometer verbaut. Der Magnetometer dient dazu, dass das Fluggerät nicht über die YAW-Achse driften kann und das Fluggerät zum Beispiel immer Richtung Norden fliegt. Der Luftdruckmesser (Barometer) dient zum halten der Höhe des Fluggerätes. Dazu misst er ständig den auf sich wirkenden Druck und steuert ggf.. dagegen. GPS wird zur Stabilisieren anhand von Satelliten genutzt. Durch ein Sonar (Ultraschallsensor) kann bis zu einer Flughöhe von 3m ziemlich genau die Höhe gehalten werden.
2. In diesem Bereich gelangst du mit einem Klick auf „Documentation fpr 1.10.0“ zur englischen Dokumentation.
3. Dieses Fenster zeigt Rückmeldungen und allgemeine Informationen der Naze32 an.
4. Im größten Bereich werden wir uns die meiste Zeit aufhalten. Hier findest du die einzelnen Tabs und darundaneben deren Inhalt.
5. In der untersten Leiste findest du Informationen zur Verbindungsqualität sowie die Versionsnummer von Cleanflight. Dieser Bereich ist nur wichtig für dich, wenn du die Verbindung via Bluetooth herstellst.
Tab: Setup
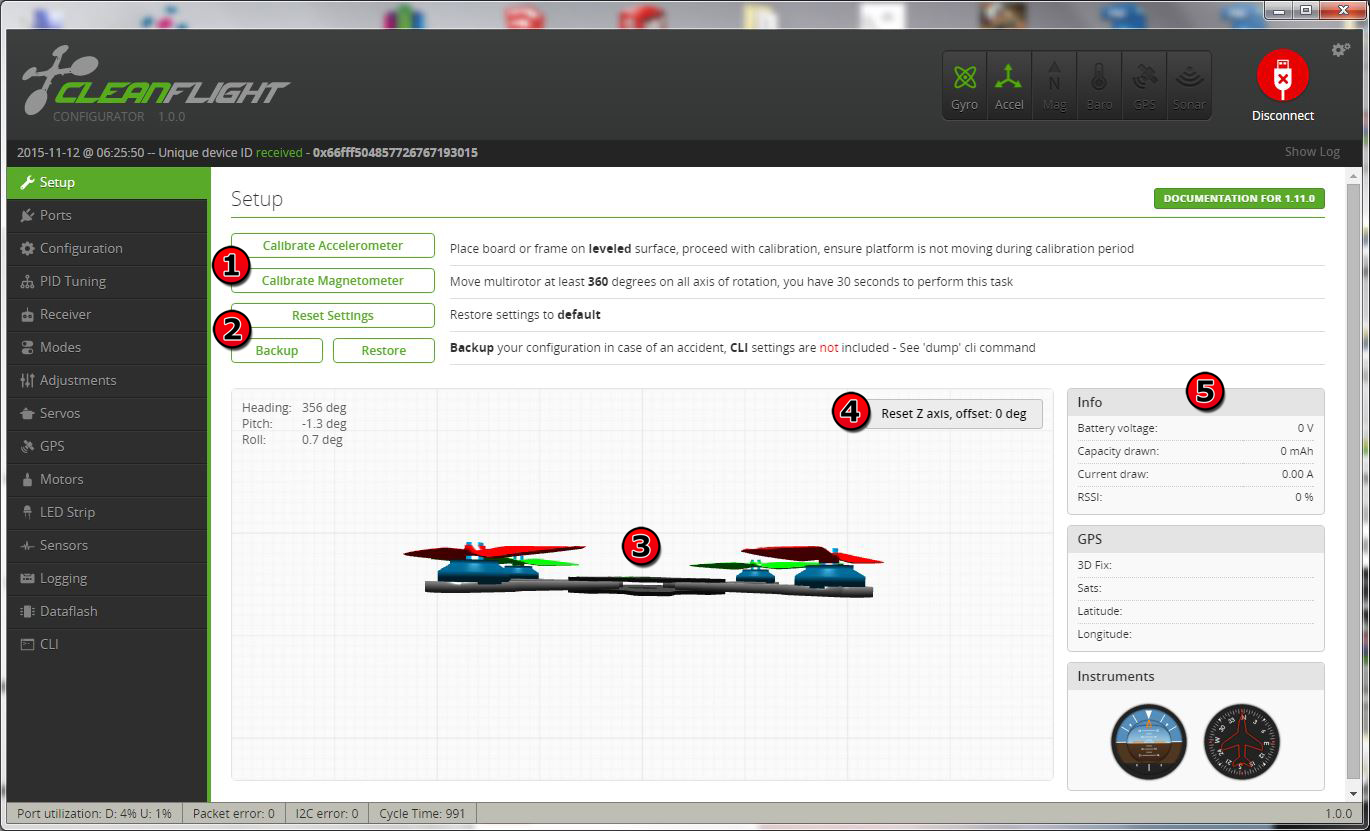
Cleanflight Setup
In diesem Tab können grundlegende Dinge wie Kalibrierung gemacht werden.

Beschleunigungssensor kalibrieren
Mit dem Button „Calibrate Accelerometer“ könnt ihr euren Beschleunigungssensor kalibrieren.
Schritt 1: platziert den Kopter auf eine ebene Fläche und passt auf, dass er sich wegen der Kalibrierung nicht bewegt
Schritt 2: Drückt auf „Calibrate Accelerometer“ und wartet bis der Vorgang abgeschlossen ist.
Ihr erhaltet dann folgende Meldung:
12:49:27 -- Accelerometer calibration started 12:49:29 -- Accelerometer calibration finished
Magnetometer kalibrieren
Mit dem Button „Calibrate Magnetometer“ wird euer Magnetometer kalibriert. Bei dieser Kalibrierung müsst ihr den Copter um alle 3 Achsen (Roll, Pitch, Yaw) um 360° drehen.
Schritt 1: Drückt auf „Calibrate Magnetometer“ und ihr habt 30 Sekunden zeit für die nächsten Schritte.
Schritt 2: Drehe den Kopter um alle 3 Achsen um mindestens 360°
Roll Pitch Yaw
Schritt 3: Nun platziere den Kopter wieder und warte bis der Vorgang abgeschlossen ist.
13:07:17 -- Magnetometer calibration started 13:07:47 -- Magnetometer calibration finished

Werkszustand – Reset Settings
Möchte man alle Einstellungen auf Werkseinstellungen zurücksetzten drückt man diesen Button. Achtung: Alle Daten gehen verloren.
Backup der Einstellungen
Mit einem Klick auf „Backup“ können die Einstellungen in einer Textdatei (.txt) gespeichert werden. Die CLI Einstellungen werden nicht gespeichert. Deswegen ist es wichtig auch diese zu sichern.
CLI-Einstellungen sichern
Klickt auf den Tab „CLI“ und gebt folgenden Befehl ein:
dump
Nun werden alle CLI Variablen untereinander geschrieben. Diese solltest du in einem weiteren Textdokument abspeichern.
Backup wiederherstellen – Restore
Wenn du die Einstellungen aus einem Backup wiederherstellen möchtest, geht das über diesem Knopf. Wird er gedrückt musst du nur die Textdatei mit dem Backup auswählen.
Um das CLI-Backup wiederherzustellen reicht es völlig aus den Inhalt der CLI-Backup Textdatei in dem Tab „CLI“ einzugeben und mit Enter zu bestätigen.

Hier wird das Modell angezeigt. Es reagiert auf Bewegungen auf allen Achsen.
Z-Achse zurücksetzten – Reset Z axis

Wenn du deinen Kopter in Flugrichtung vor dir auf dem Schreibtisch stehen hast und der Copter in der GUI aber zum Beispiel nach links zeigt, kannst du mit drücken auf den „Reset Z axis“ Button den Copter wieder gerade ausrichten.

In diesem Fenster erhältst du weitere Informationen wie Spannungen, Signalstärken und GPS
Tab: Configuration

Cleanflight Configuration
Dieser Tab ist dazu da, Grundlegende Dinge für deinen Copter einzustellen.
Mixer
Hier wird per Dropdownmenü der Typ des Flugmodells ausgewählt. In unserem Fall betreiben wir einen regulären Quadrocopter und wählen daher das Modell „Quad X“. Die durchnummerierten Motoren sollten in dieser Reihenfolge an die Motorenausgänge des Naze32 angeschlossen werden. Die Drehrichtung der Motoren ist hier auch dargestellt.
Board Alignment
Dieser Punkt ist für alle diejenigen wichtig, die das Naze32 Board auf dem Quadcopter drehen oder neigen möchten. Normalerweise muss die Flugsteuerung immer mit dem Pfeil in Flugrichtung eingebaut werden. Damit ist der USB Port aber schwer zu erreichen.
Wenn wir die Flugsteuerung auf dem Quadcopter drehen, geben wir also die exakte Gradzahl der Drehung bzw Neigung (z.B. bei Motortilts) an.
Receiver Mode
Der Receiver wird dazu benötigt die Steuerbefehle der Funke zu empfangen und an die Flugsteuerung weiterzugeben. Es gibt 3 grundlegende Methoden dazu:
1. PWM (Pulsweitenmodulation)
2. CPPM
3. Serial
Ein Standard PWM Empfänger (alle Kanäle einzeln verkabelt) benötigt hier die Einstellung „RX_PARALLEL_PWM“.
Wenn wir zum Beispiel einen FrSky DR4-2 Empfänger mit CPPM nutzten möchten, müssen wir die Einstellung „RX_PPM“ auswählen.
Der „FrSky TFR4 SB“ nutzt die SBUS Übertragung und benötigt dazu die Option „RX_SERIAL“.
Serial Receiver Provider
Hier wird dem Empfänger entsprechend die passende Option gewählt.
ein FrSky DR4-2 CPPM Empfänger wird mit der Einstellung „SPEKTRUM1024“ betrieben.
RSSI (Signal Strenght)
RSSI bedeutet „Received Signal Strength Indication“ und bedeutet soviel wie Signalstärke. Einige Reciever können die Signalstärke, also die Verbindung zwischen Funke und Receiver, messen und dieses an die Flugsteuerung weitergeben. Im Zusammenspiel mit einem OSD (On Screen Display) kann so im FPV-Bild (Videodownlink) eine Warnung ausgegeben werden wenn die Verbindung droht abzubrechen.
Receiver failsafe
Falls der Receiver Failsafe unterstützt, kann dies hier aktiviert werden. Sollte der Copter also in den Failsafe gehen wird automatisch der Steuerbefehl Throttle 1200 (Gaswert) ausgeführt. Dieser Wert sollt unbedingt vorher getestet werden. Der Wert sollte so eingestellt werden, sodass der Copter langsam sinkt und eine sanfte Landung hinlegt.
Ist der Gaswert zu hoch, kann es passieren, dass der Copter Richtung Himmel steigt und versucht auf dem Mond zu landen. Er steigt solange, bis der Flugakku leer ist. Also Vorsicht, ich spreche aus Erfahrung. 😉
GPS
Hier wird GPS aktiviert und konfiguriert. Es muss das korrekte Protokoll (NMEA oder UBLOX) ausgewählt werden und die korrekte Baudrate.
ESC/Motor Features
MOTOR_STOP : Diese Einstellung ist sehr wichtig. Wenn der Hacken hier gesetzt ist, was ich dringend empfehle, starten die Motoren NICHT wenn der Copter scharf gestellt (armed) wird. Ansonsten würden die Motoren sofort anfangen zu drehen.
ONESHOT125 : Hier kann das bekannte Feature Oneshot aktiviert werden sollten eure ESCs dies unterstützten.
Minimum Throttle:
Dies ist der niedrigste Wert um die Motoren zu starten. Wenn „MOTOR_STOP“ aktiviert ist drehen sich die Motoren nach dem scharfstellen auf „MINTHROTTLE“ Geschwindigkeit. Den Wert findet ihr heraus, wenn ihr im Tab „Motors“ die Motoren (natürlich ohne Propeller) mit dem Schieberegler startet.
Middle Throttle:
Dies ist der Wert eurer Mittelstellung der Funke. Dies sollte 1500 sein.
Maximum Throttle:
Dies ist der Wert bei Vollgas. Der Wert ergibt sich nach dem Kalibrieren der ESCS. Wählt hier nicht das Maximum sondern geht ein wenig darunter. Somit haben die Motoren bei Vollgas noch Luft zum ausgleichen und drehen nicht am Maximum.
Minimum Command:
Dies ist der kleinste Throttle Wert den die Flugsteuerung nutzt.
Dieser Wert wird zum Beispiel benötigt, wenn die ESCs kalibriert werden.
Standard ist 1000.
Accelerometer Trim
Hier kann der Beschleunigungssensor in Roll und Pitch getrimmt werden.
Battery Voltage
Mit dieser Einstellung kann der Flugakku überwacht werden.
Die verschiedenen Spannungen können separat eingestellt werden.
Warnungen werden per Pieper/Buzzer sowie LED Blinken ausgegeben.
Current Sensor
Hier kann ein Amperemeter angeschlossen werden um den Stromverbauch zu messen. Wenn kein Sensor verbaut werden soll kann auch ein virtueller Sensor verwendet werden. Der Stromverbauch wird dann anhand der Throttlebefehle ermittelt. Hierzu muss Scale und Offset passend konfiguriert werden.
Other Features
INFLIGHT_ACC_CAL: Kalibrierung während des Fluges
SERVO_TILT: Wird für die Steuerung eines Gimbals genutzt.
SOFTSERIAL: Software Seriell Port
SONAR: Wenn ein Sonar (z.B HC-SR04) verwendet wird
TELEMETRY: Telemetrie ausgeben
3D: Wird benötigt wenn man 3D fähige ESC verwenden möchte. z.B Überkopf-Flug
LED_STRIP: Wird aktiviert wenn man RGB LED Strips steuern möchte. Anleitung hier.
DISPLAY: Für den Anschluss eines OLED Displays
BLACKBOX: Nutztung einer Blackbox
Tab: Ports
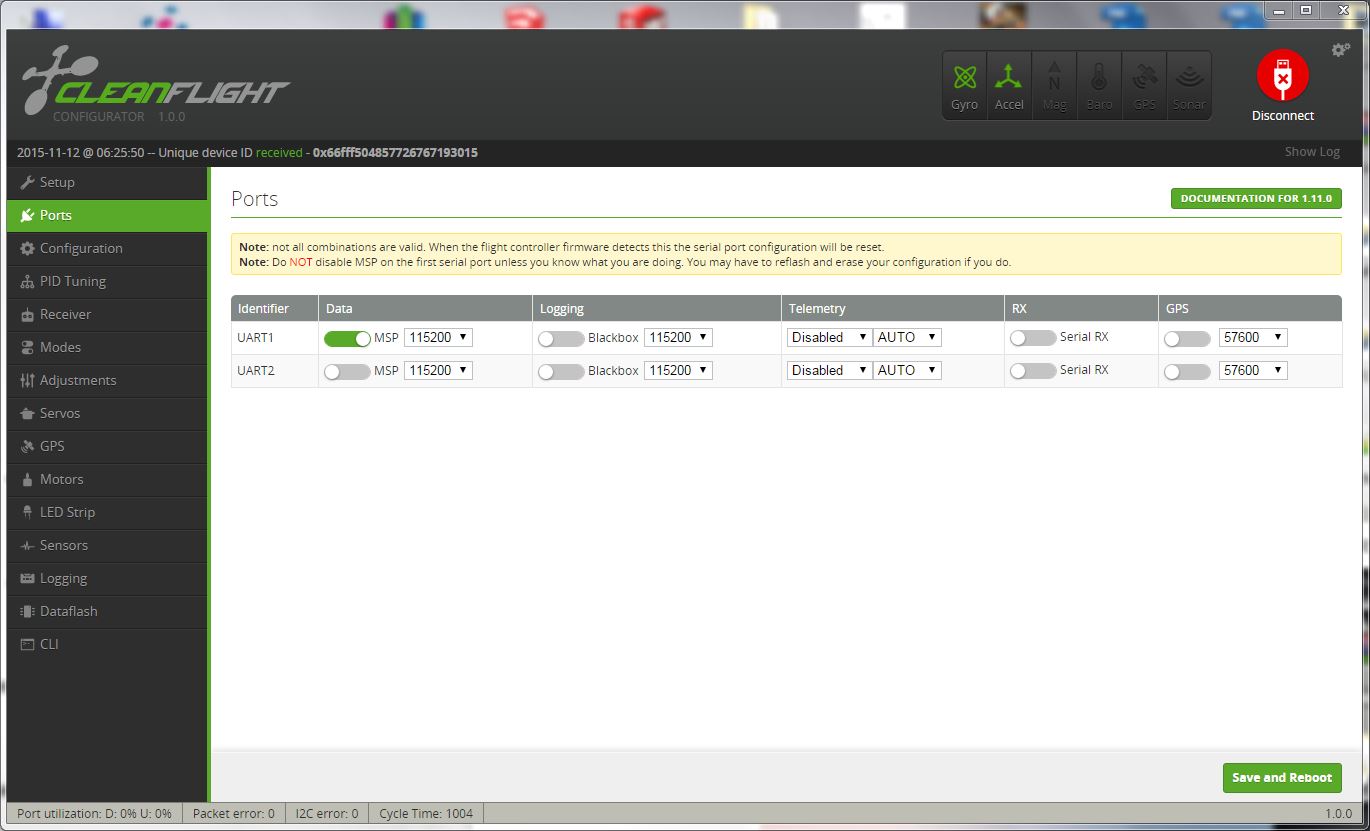
Cleanflight Ports
In diesem Menü kann man die Seriellen Schnittellen zuordnen. Um zum Beispiel ein Bluethooth Modul zu nutzten, muss „UART1“ auf CLI stehen.
man kann das Bluethooth Modul ebenfalls nutzten wenn es auf „MSP, CLI, Telemetry (when armed) , GPS Passthrough“ steht.
Nicht alle Kombinationen die man hier Einstellen kann, können auch verwendet werden. Wenn eine Kombination nicht stimmig ist, wird der Eintrag automatisch zurückgesetzt.
Tab: PID Tuning

Cleanflight PID Tuning
Mit PID Werten könnt ihr das Verhalten eures Copters ziemlich genau einstellen.
Vorab: Es ist völlig sinnlos andere Piloten nach deren PID-Werten zu fragen. Jeder Copter ist in seiner Zusammenstellung nahezu einzigartig.
Nahezu alle Teile an eurem Copter können die PID-Werte beeinflussen.
Dazu gehört die Bauform (Frame), Propellertyp, Lipo, Regler, Motoren usw. Gewicht und Schwerpunkt sind ausschlaggebend für eure PID-Werte.
Ändert ihr eine der oben aufgeführten Dinge, müsst ihr unter Umständen die PID-Werte neu einstellen.
Was sind PID-Werte?
Wir gehen mal davon aus, dass euer Copter vor euch perfekt auf der Stelle schwebt und plötzlich durch einen Windstoß beeinflusst wird.
Diese Änderungen merken die verschiedenen Sensoren des Copters und er wird versuchen dagegen steuern. Dieses Steuern kann man mit den PID-Werten einstellen.
Erklärung: P-Wert
Mit dem P-Wert kann man die Stärke und Schnelligkeit einstellen wie der Copter gegensteuert um in die Ausgangslage zu kommen. Dabei ist nicht der Ausgangspunkt gemeint sondern nur die Lage. Je höher der P-Wert ist desto schneller steuert der Copter gegen.
Erklärung: I-Wert
Bei kleiner Lageänderung muss der Copter nicht zwingend dagegen steuern und bei einer großen Lageänderung sollte der Copter unbedingt dagegen steuern. Mit dem I-Wert wird festgelegt bei welcher Intensität der Lageänderung der Copter dagegen steuert. Ist der I-Wert zu hoch, kann es sein, dass der Copter bei jedem „Lüftchen“ versucht dagegenzusteuern. Es kann vorkommen, dass der Copter zu zittern anfängt.
Erklärung: D-Wert
Mit dem D-Wert legt ihr die Aufteilung der Steuerungsgewalt zwischen Pilot und Flugsteuerung fest. Beträgt der Wert 0 wird der Copter nichts mehr machen, bei Maximum wird der Copter alleinig die Steuerung übernehmen. Hier müsst ihr testen, welche Werte zu euch am besten passen.
Tab: Receiver
Cleanflight Receiver
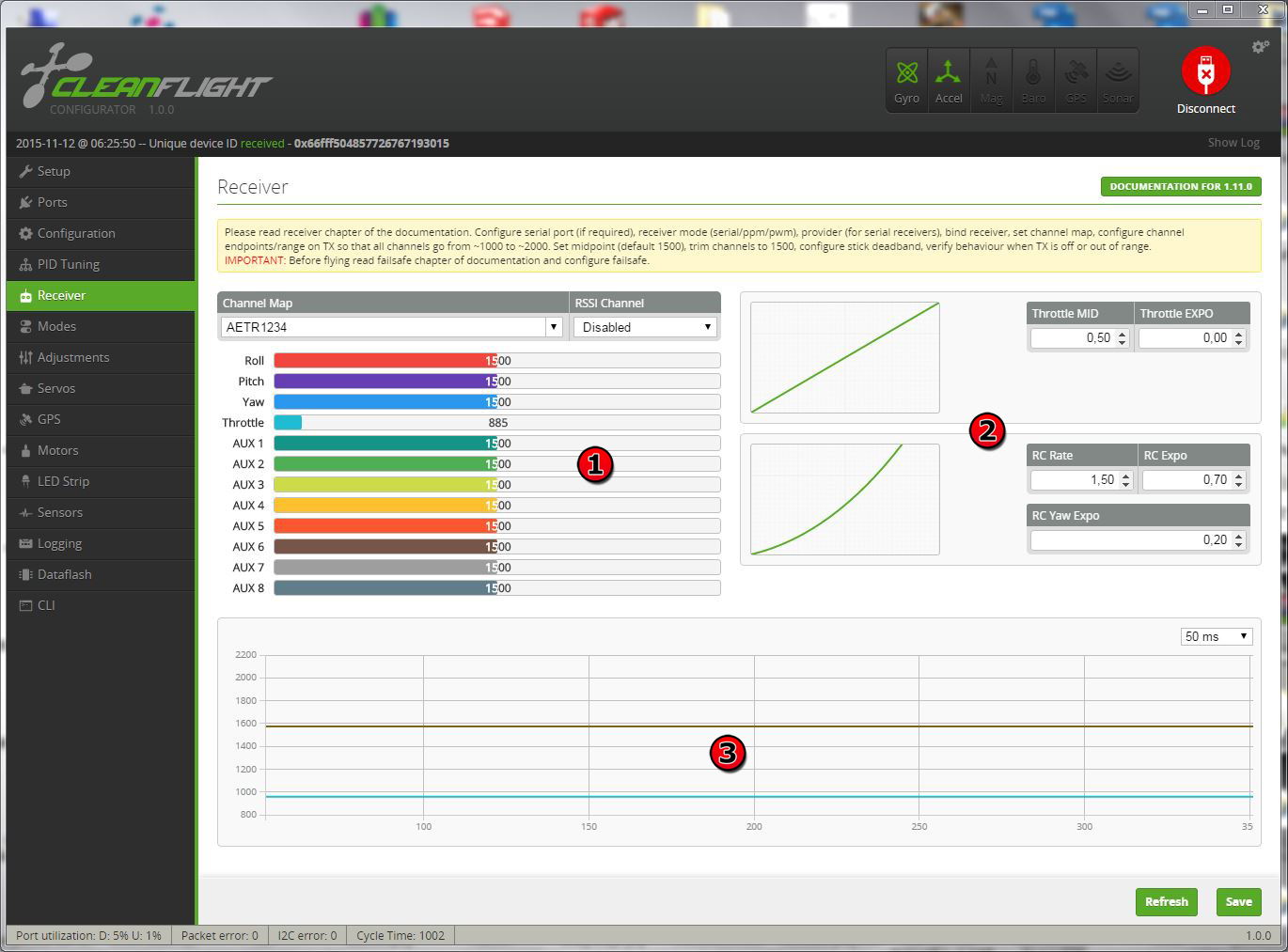
Kanalübersicht
In diesem Tab könnt ihr die Verbindung zu eurer Funke testen und konfigurieren.
Kasten 1 zeigt alle verfügbaren Kanäle an und deren aktuelle übermittelten Wert wenn die Funke mit der Naze32 verbunden ist.
Wichtig ist, dass alle Sticks (YAW, PITCH und ROLL) in Mittelstellung einen Mid-Wert von 1500 ausgeben. Wenn ihr eure Sticks also nicht bewegt muss immer 1500 ± 2 anzeigen. Würde zum Beispiel der Wert bei YAW in Mittelstellung 1590 anzeigt, würde sich der Kopter langsam drehen wenn man ihn schweben lassen würde.
Die meisten Funken bietet die Funktion Subtrim. Damit kann man die einzelnen Kanäle fein abstimmen sodass alle auf die gewünschten 1500 kommen.
Minimal sollte der Wert ca 1000 sein und maximal ca. 2000.
Hier die Kanalübersicht einer Funke im Mode 2:
linker Stick hoch runter = Throttle (Gas)
nach unten = 1000
nach oben = 2000
linker Stick links/rechts = Yaw (Drehen)
nach links = 1000
nach rechts = 2000
rechter Stick hoch/runter = Pitch
nach unten = 1000
nach oben = 2000
rechter Stick links/rechts = Roll
nach links = 1000
nach rechts = 2000
Testet diese Werte mit eurer Fernbedienung. Es kann sein, dass Kanäle invertiert oder getauscht werden müssen. Am Ende sollten die Sticks wie oben beschrieben reagieren.
Im zweiten Kasten können folgenden Einstellungen getätigt werden:
Throttle MID
Dies ist der Wert in dem euer Kopter auf einer Höhe schweben sollte. Dies ist bei jedem Kopter anders und muss durch ausprobieren herausgefunden werden. Beispiel: Wenn euer Kopter bei 50% Gas (also Mittelstellung Thottle) für längere Zeit schwebt ohne, dass ihr nachjustieren müsst habt ihr den korrekten wert gefunden und ihr könnt 0,5 eintragen. Die 0,5 steht für 50% Gas. Bei schwereren Coptern kann es vielleicht bei 60% sein oder bei über motorisierten Koptern schon bei 45%. Weitere Infos hier
Throttle EXPO
Mit diesem Wert könnt ihr die Gaskurve verändern. Dies wird oft benutzt um im Bereich 45%–55% Gas eine feinere Abstimmung zu erlangen. In diesem Bereich reagiert der Copter dann genauer. Sobald man aus diesem Bereich heraus kommt reagiert der Copter langsamer. Das ganz geht natürlich auch andersherum. Mit der richtigen Einstellung soll es für viele einfacher sein die Höhe zu halten. Wer sich an eine lineare Gaskurve gewöhnt ist wird vermutlich Schwierigkeiten haben. Also am besten einfach rantasten und testen.
RC Rate / RC Expo
At the beginning, there was only the pitch / roll rate settings.
It was introduced because the looping and flips were way to slow with default settings.
The principle is to decrease to correction control when the sick is far from the center.
This way, the rotation rate is less constrained when the sticks are not centered => with a value of 1, you will have the maximum possible rotation rate and the ability to do multiple flips per seconds.
It acts as a „super expo“, and you it doesn’t change the accuracy near the center.The RC RATE was introduced after specially for Warthox 😉
The purpose is just to be able increase the rotation rate in a linearly way.So it depends on what you expect.
– want to fly cool and be able to do fast flips sometimes => pitch/roll rate
– want a very nervous multi in all circumstances => rc rate
Now you have the choice, and you have also the rc expo curve acting as a third parameter.
Channel Map
Hier kannst du die Reihenfolge der Kanäle ändern falls deine Funke sie anders sortiert hat. In der Regel wird an dieser Option nichts geändert und ggf. nur an der Funke angepasst, sodass die Kanalsortierung übereinstimmt.
RSSI Channel
RSSI = (R)elative (S)ignal (S)trength (I)ndicator gibt die Empfangsstärke wieder. Diese Information gibt Auskunft über die Signalstärke der Funke zum Empfänger. Vor allem die FrSky Module unterstützten RSSI, welche frühzeitig eine Warnung ausgeben wenn sollte die Verbindung drohen abzubrechen.
Im dritten Kasten, werden alle Kanäle als Graphen dargestellt und können überprüft werden wie das Signal ankommt.
Tipp: Den Copter scharf stellen ohne einen AUX Kanal zu konfigurieren („arming“ oder auch „armen“ genannt)
Das „Arming/Disarming“ mache ich nicht per Schalter sondern per Stick (Throttle/Yaw).
Das geht wie folgt:
Linker Stick nach unten-rechts: Multicopter ist scharf
Linker Stick nach unten-links: Multicopter ist nicht scharf
Das hat folgende zwei Vorteile:
1. Du sparst dir einen Kanal
2. Nach ein paar Sekunden wird das „arming“ deaktiviert, wenn du keine Stick-Bewegungen machst. Das ist ein nettes Sicherheitsfeature.
Tab: Modes
Cleanflight Modes
Dieser Tab wird vor-allem dazu verwendet um zwischen einzelnen Flugmodi zu schalten.
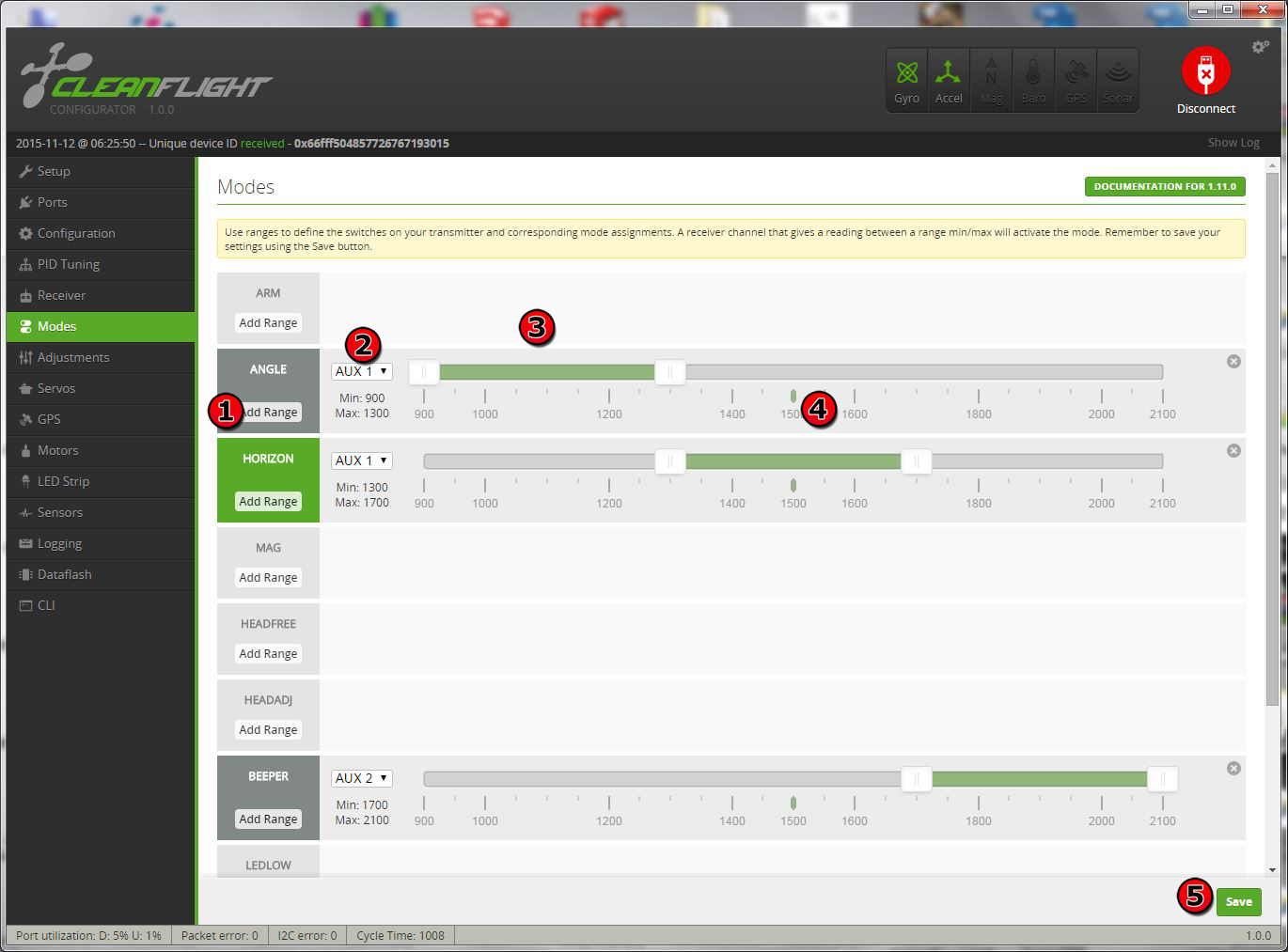
Mode/Funktion auf einen Kanal konfigurieren
1. Mit einem Klick auf „Add Range“ kann ein neuer Schieberegler erstellt werden. Der grüne Schieberegler kann eine beliebige Spanne eines Wertes einfangen.
2. Die eingestellte Spanne überwacht den Aux-Kanal den man ausgewählt hat.
3. Die eingestellte Spanne kann nun auf dem Kanal verschoben werden und wird aktiv, wenn der Wert auf dem Kanal in dieser Spanne liegt
4. Der kleine gelbe Balken zeigt den aktuellen Wert auf dem jeweiligen Aux Kanal an.
5. Nachdem ihr eure Modis konfiguriert habt, nicht vergessen zu speichern.
Was genau ist nun in dem oberen Bild eingestellt.
AUX 1 ist ein 3Fach Schalter. Aus dem Bild heraus kann man dies allerdings nicht sehen. Warum ein 3-Fach Schalter verwendet wurde erkennt ihr gleich.
… Wenn der Schalter auf dem AUX Kanal 1 die erste Stellung schaltet ist der „Angle“ Modus aktiv.
…Wenn der Schalter auf dem AUX Kanal 1 die zweite Stellung schaltet ist der „Horizon“ Modus aktiv.
…Wenn der Schalter auf dem AUX Kanal 1 die dritte Stellung schaltet ist der „Acro/Manuell“ Modus aktiv. Dieser Modus muss nicht extra ausgewählt werden. Der Modus ist immer dann aktiv, wenn keiner der anderen Modi aktiv ist.
Außerdem:
AUX-Kanal 2 aktiviert einen Pieper um das Modell besser lokalisieren zu können.
Übersicht: Mode-Funktionen
| ARM | Schaltet die Motoren scharf |
| ANGLE | Fliegen im Auto-Level Modus |
| HORIZON | Fliegen im Auto-Level Modus + Flips |
| BARO | Fliegen mit Barometer-Sensor. Die Höhe wird gehalten, wenn der Gas Stick auf 50% steht. Kann mit Angle/Horizon kombiniert werden. |
| MAG | Wenn ein Magnetometer verbaut ist und MAG aktiv ist, erkennt er die Himmelsrichtungen und bleibt immer in seiner Richtung wenn keine Kursänderung gemacht wird. Kein Yawdriften zum Beispiel. |
| HEADFREE | Wenn dieser Modusk aktiv ist, hat Yaw keinen Einfluss auf Pitch/Roll |
| HEADADJ | Mit diesem Befehl wird eine neue Yaq Position für „Headfree“ gesetzt |
| CAMSTAB | Kamera Stabilisierung einschalten |
| GPSHOME | Mit GPS Unterstützung an den Startpunkt/Homepoint fliegen. |
| GPSHOLD | Höhe und Position wird mittels GPS automatisch gehalten |
| BEEPERON | Aktiviert einen Pieper. Nützlich um das Modell nach einem Crash wiederzufinden |
| OSD | OSD (Onscreendisplay) einschalten |
| TELEMETRY | Telemetrie einschalten |
| SONAR | Höhe wird automatisch gehalten. Dazu wird ein Ultraschall/Sonar Sensor benötigt |
| BLACKBOX | aktiviert das Logging in eine Blackbox, falls vorhanden |
| GTUNE | Automatisches tunen von Pitch/Roll/Yaw P-Werten |
Tab: Adjustments
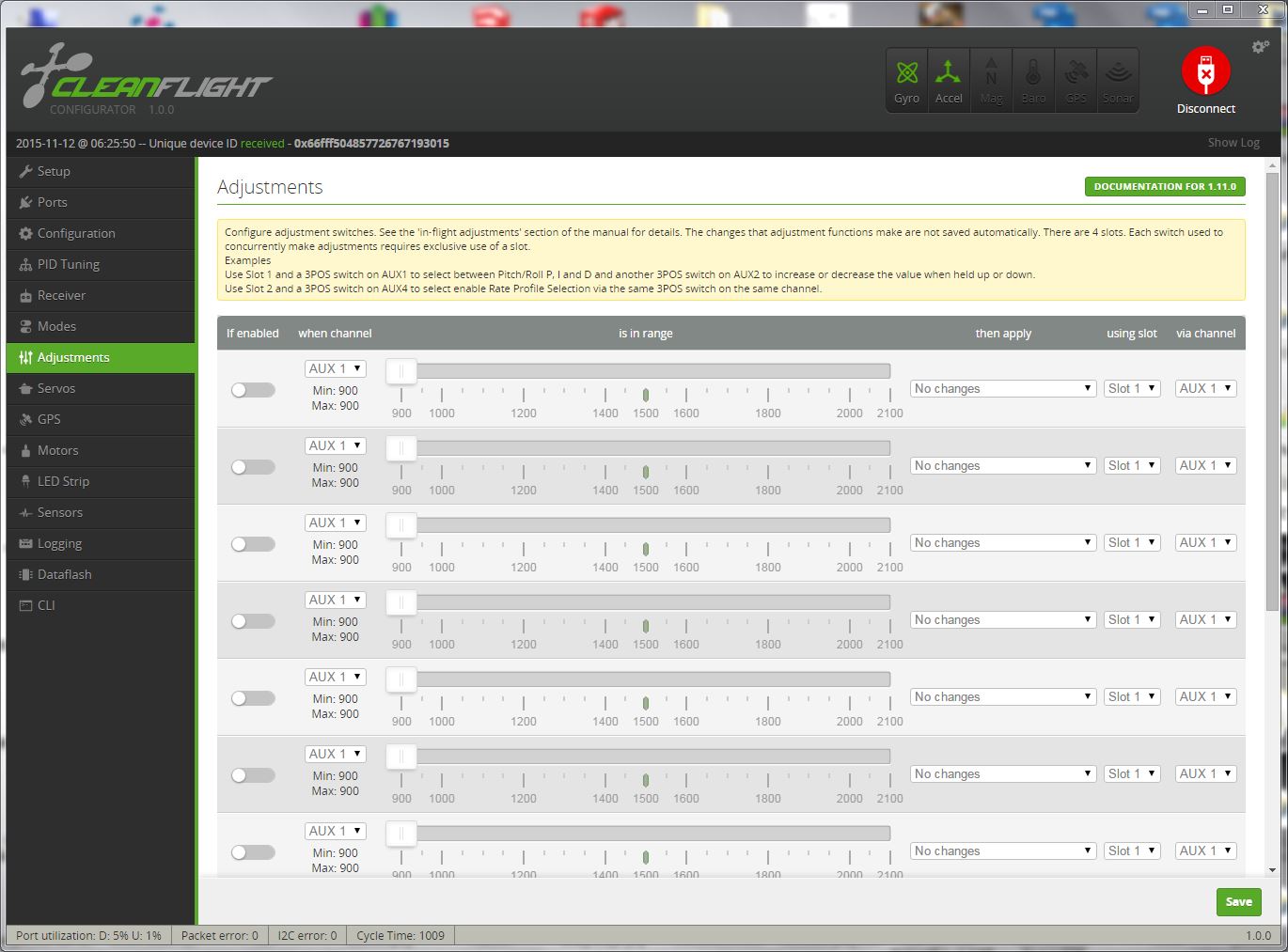
Cleanflight Adjustments
Mit den Adjustments können während des Fluges folgende Parameter verändert werden.
- RC Rate
- RC Expo
- Throttle Expo
- Roll & Pitch Rate
- Yaw Rate
- Pitch+Roll P I and D
- Yaw P I and D
Dieses Thema ist für das Handbuch noch nicht übersetzt, das es sehr umfangreich ist. Deswegen verweise ich auf das englische Handbuch
Tab: Servos
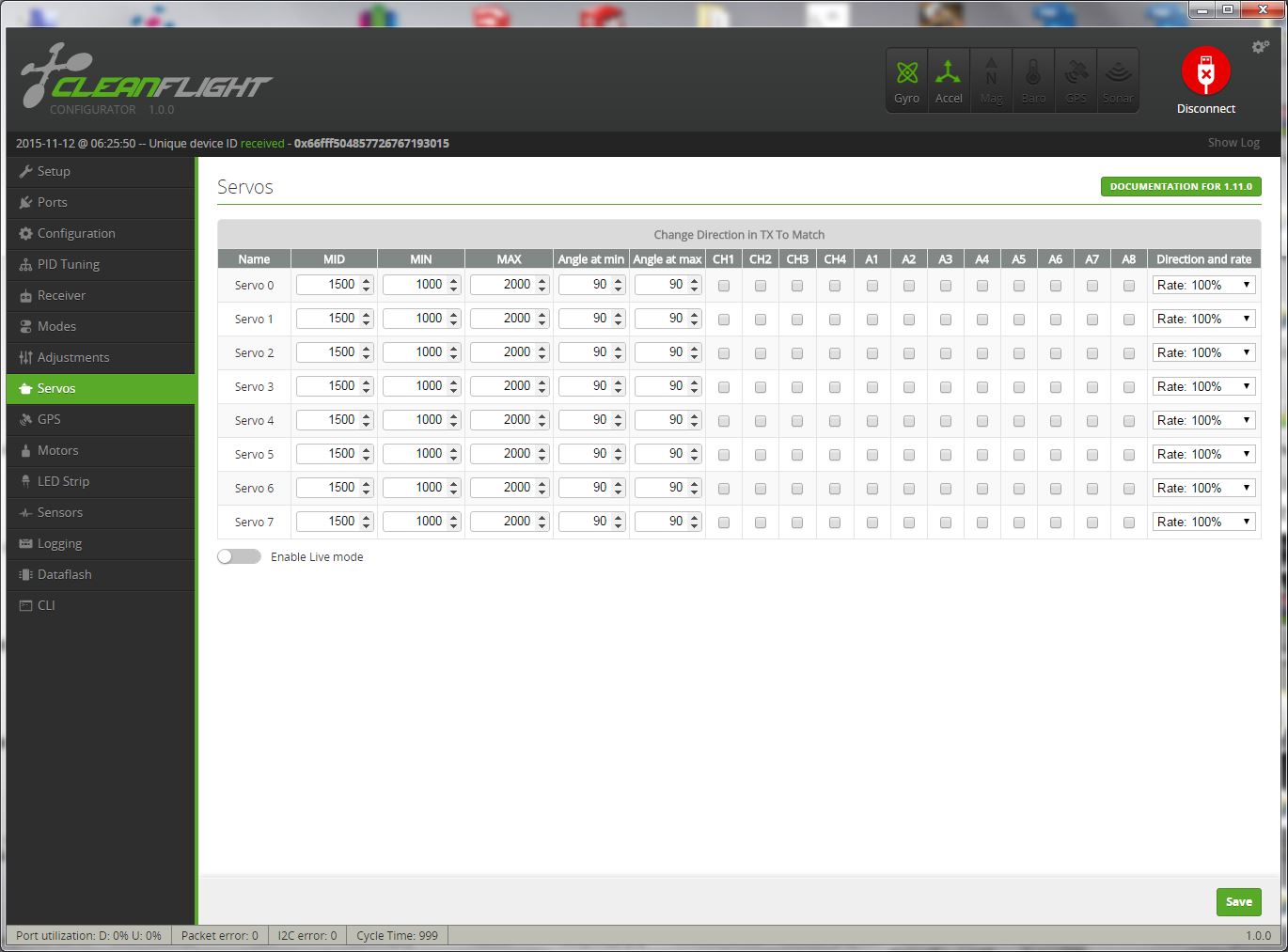
Cleanflight Servos
work in progress
Tab: GPS

Cleanflight GPS
work in progress
Tab: Motors
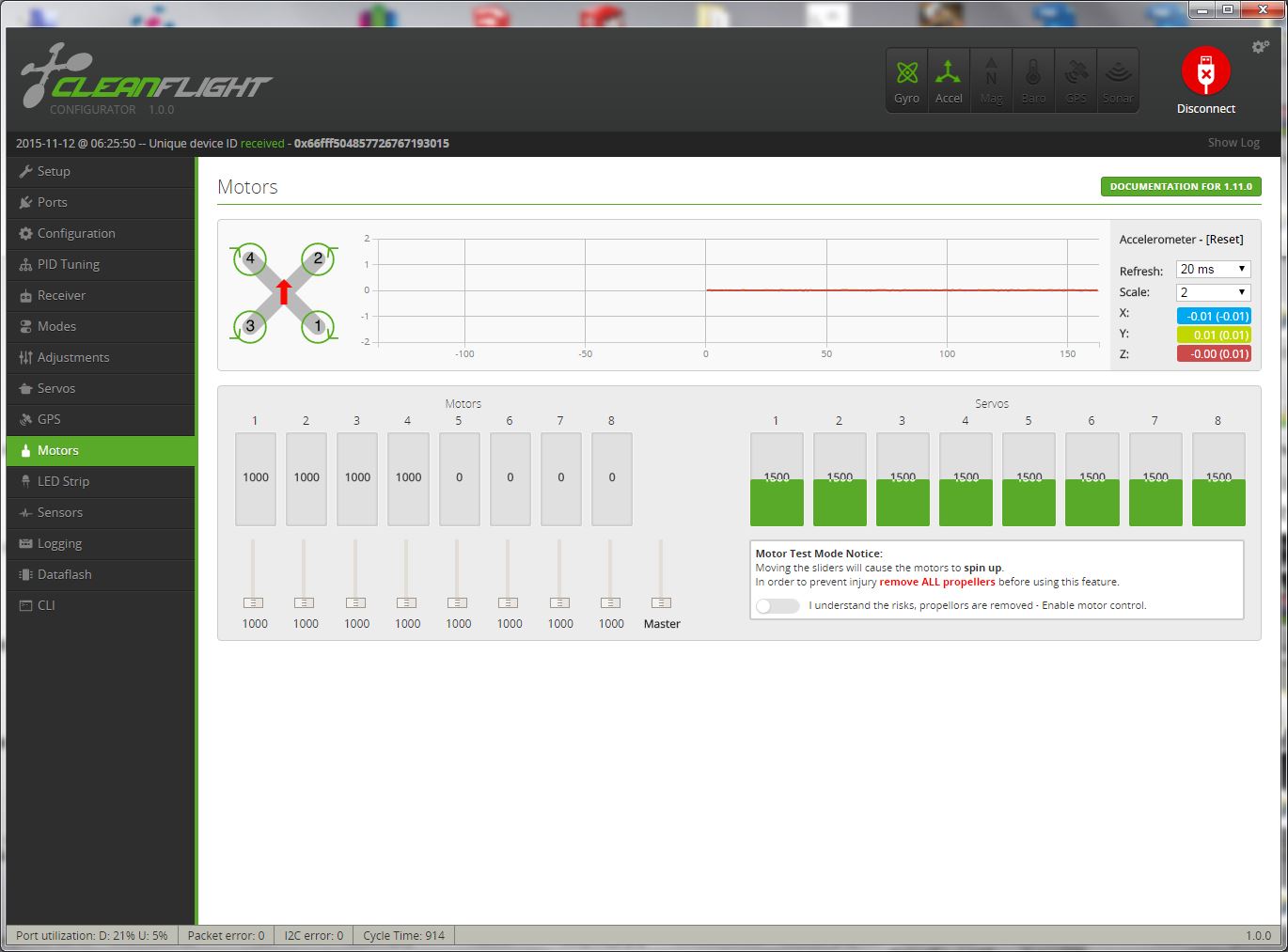
Cleanflight Motoren
In diesem Tab könnt ihr eure Motoren testen oder zum Beispiel eure ESCs kalibrieren. Außerdem kann man hier die Servowege ebenfalls einsehen, falls ihr welche verbaut habt.
Eure Motoren werden mit den Nummern 1–8 angezeigt. Mit dem Schieberegler unter jedem Motor kann jeder Motor einzeln angesteuert und getestet werden.
Mit dem Master Schieberegler können alle gleichzeitig getestet werden.
Bitte nehmt wie Warnung erst, und ENTFERNT bevor ihr die Motoren einschaltet ALLE PROPELLER!
ESCs kalibrieren funktioniert wie folgt:
1. Naze32 per USB anschließen und in den Motor Tab wechseln. Die „Check“-Box unter der Warnung aktivieren und den Masterregler komplett nach oben schieben.
2. Nun einen Akku verbinden. Die ESCs machen nun einen bestimmten Ton und signalisieren, dass sie Bereit für die Kalibrierung sind.
3. Nun mit einem Klick den Schieberegler auf 0 setzten. Nicht ziehen, sondern mit einem Klick auf das untere Ende. Danach sollten alle ESCs die Kalibrierung mit einem Piepen bestätigen.
4. Eure ESCs sind kalibriert.
Tab: LED Strip
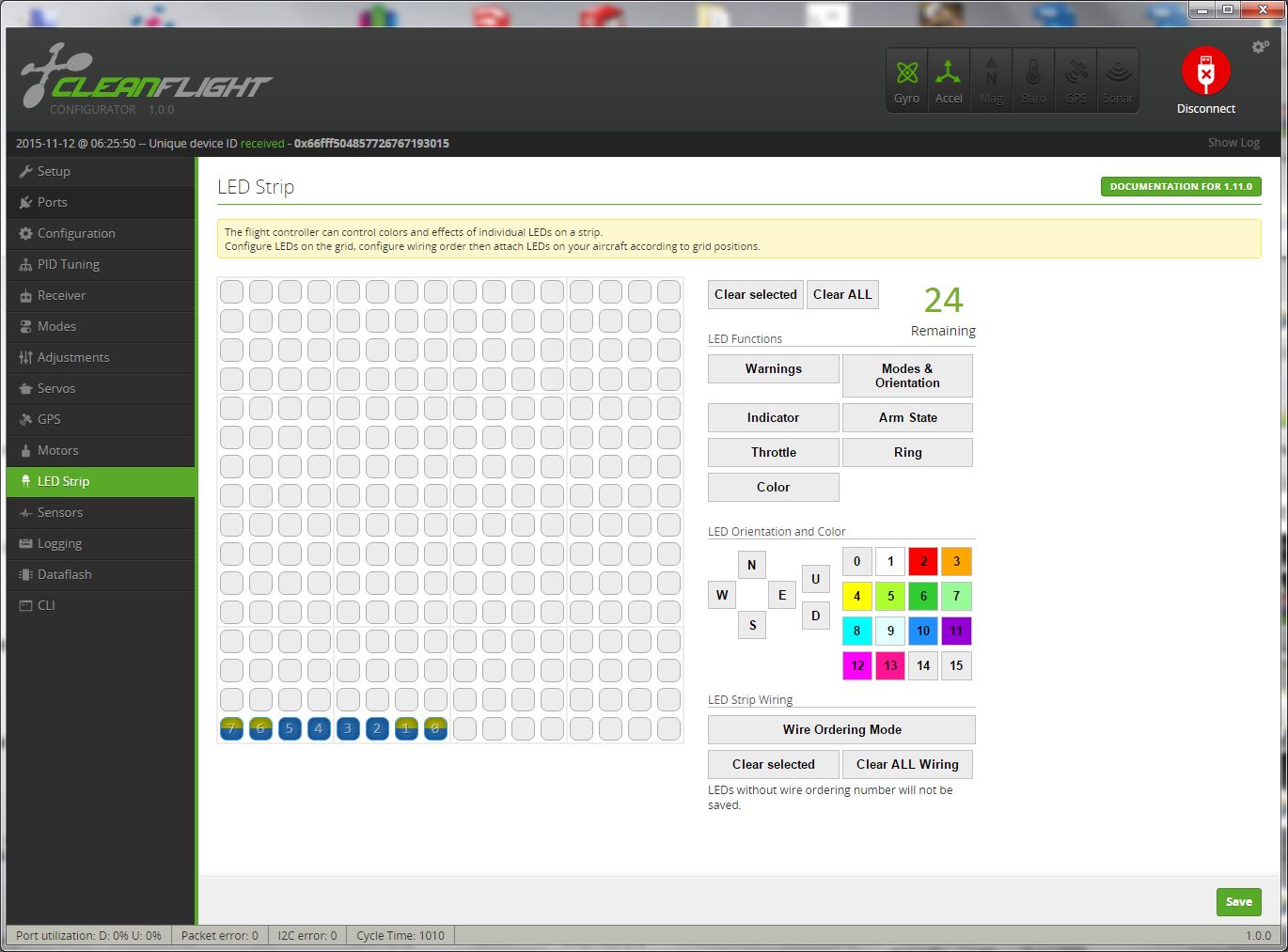
Cleanflight LED
Hier findest du ein Tutorial wie man WS2812 LEDs an das Fluggerät anschließen kann. Ein Tutorial zur Konfiguration folgt später.
Tab: Sensors
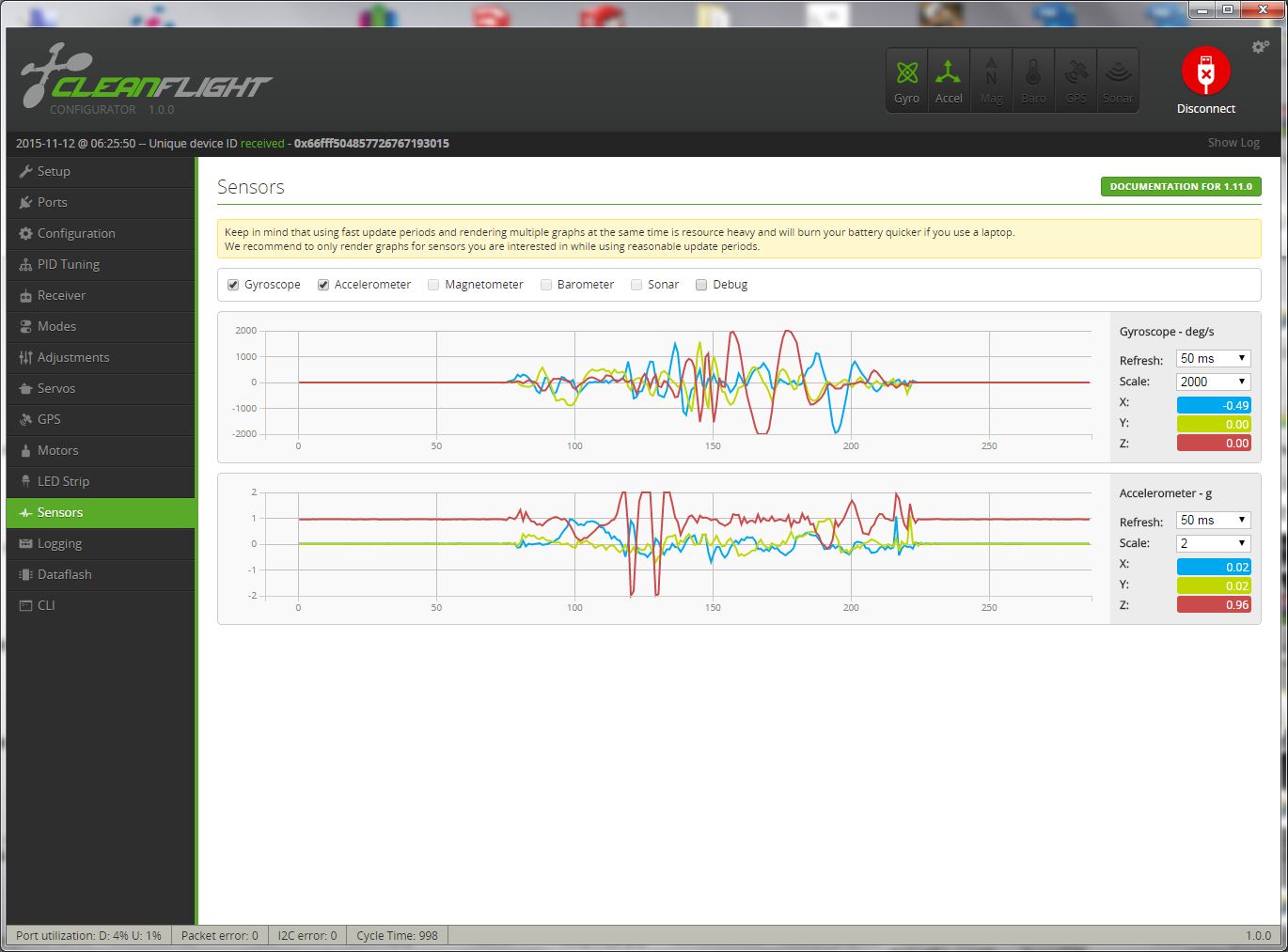
Cleanflight Sensors
work in progress
Tab: Logging
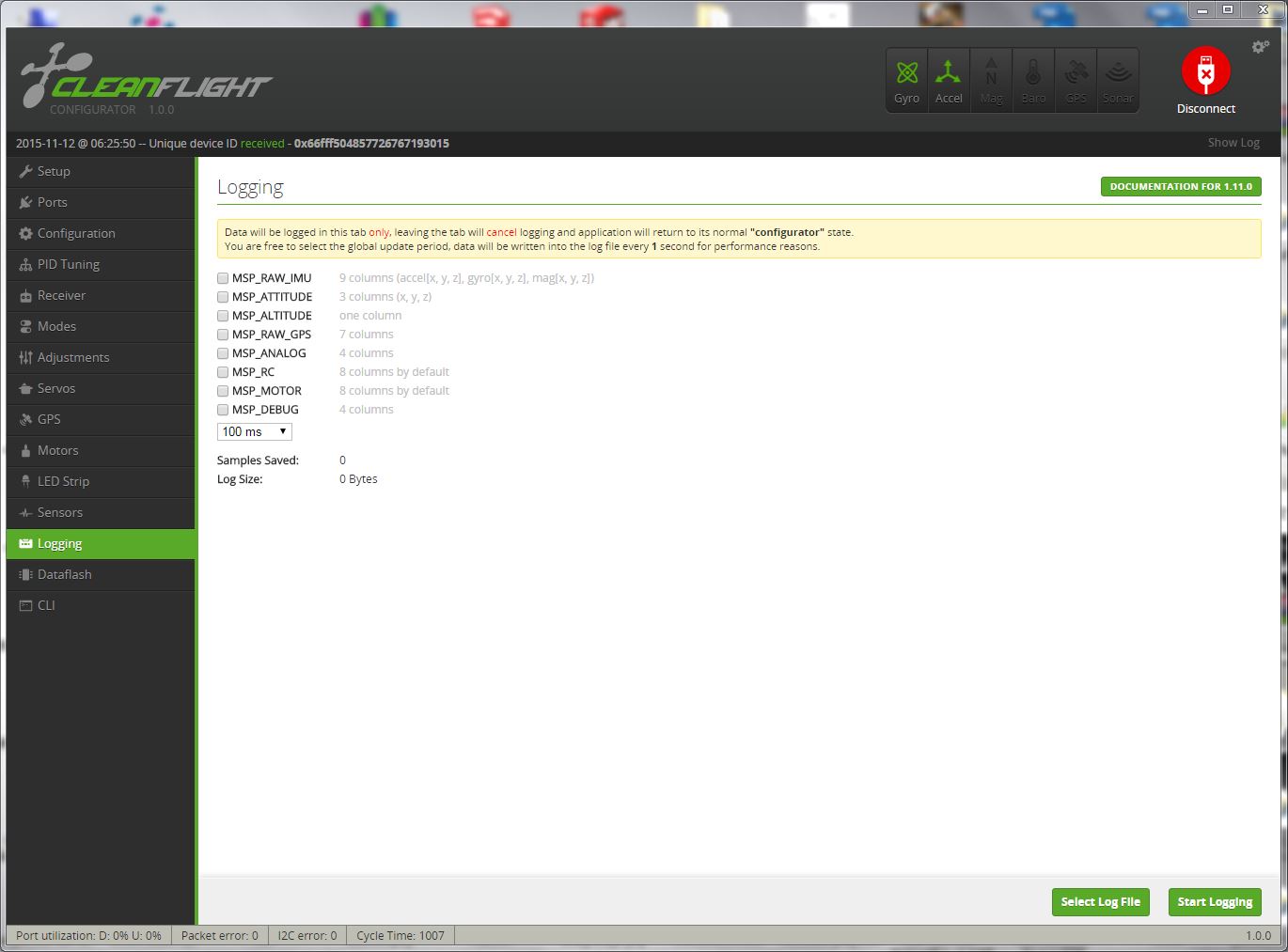
Cleanflight Logging
work in progress
Tab: Dataflash
Cleanflight Dataflash
work in progress
Tab: CLI

Cleanflight CLI
Wenn euch der Artikel gefallen hat, lasst es mich wissen.
Bei Fragen, Anregungen und Kritik bitte ich euch diese unten in die Kommentare zu schreiben.

Hi Phil,
tolle Website, wurede aber mit meinem Problem nicht fündig. Besitze einen Afroflight Naze32 rev.6 irgendwie klappt das Firmware update nicht.
Entweder startet der kontroler nicht oder ich lande im CLI Fenster, wo ein neues Update verlangt wird.
Hi Robert,
bitte die aktuelle Cleanflight Version verwenden, dann solltest du das Update durchführen können!
Hallo Philipp! Danke für den super Post! Ich bekomme auf meiner Naze 32 REV6 leider kein Signal vom Receiver! Der Reciever ist ein FrSKY TFR6. Folgendes habe ich in Cleanflight bereits gemacht:
Configuration: PWM RX Input – Receiver Mode
Receiver: Channel Map FrSKY
Ports: Was muss ich unter Ports einstellen – das verstehe ich nicht was man da macht?! – hab aber schon einige Varianten durchprobiert und bin nicht weiter gekommen…
Vielen Dank & lg Chris
Hi Chris,
sieht alles korrekt verkabelt aus. Hast du auch jeden Kanal mit einem Kabel auf der FC verbunden?
Unter Ports musst du nichts mehr auswählen, da du ja PWM anstatt PPM verwendest!
Grüße,
Phil
Freue mich schon auf das Programmieren und danke für die Anleitung !!
gerne. 😉 Viel Spaß!
Hallo Phil, danke für deine tolle berich aber bei meine Naze 32 rev6 dof10 werden die mag und baro werte nicht angezeigt? warum
Hast du die Features auch aktiviert?
Hallo, danke für die ausführliche Anleitung. Ich habe nun seit längerem einen Quadro mit Naze32 10DOF hier liegen und jetzt endlich, will ich das Ding mal abheben lassen. Verwundert musste ich die neue Cleanfligt Version runterladen um dann fest zu stellen, das der Magnetometer in der neuen Version nicht funktioniert. Also wieder zurück auf die alte V_1_14_4 geflashed und siehe da, Magnetometer vorhanden.
Was mache ich denn falsch bzw wieso ist in der alten Version der Magnometer vorhanden in der neuen aber ausgegraut? (Aktiviert ist er im Cleanflight unter Configuration, Aber oben leuchtet er nicht grün)
Hey Oleri,
Cleanflight ist leider nicht mehr aktuell und ich würde dir empfehlen Betaflight zu flashen. Demnächst veröffentliche ich auch ein Handbuch dazu.
Gruß,
Phil
Sehr gut gelungen die Seit. Super informativ, gerade wenn man wie ich neu in dem Bereich ist. Gibt es irgendwo eine Tabelle oder Beschreibung der CLI Befehle?
Vielen Dank!
Für eine komplette Liste kannst du einfach „dump“ eingeben und mit „Enter“ bestätigen.
Außerdem gibts noch einen GET command
Hallo, erstmal ein dickeres Lob für diese Seite. Weiter so !
Ich habe einen Eachine Falcon. Ich möchte von CC3D auf SP racing F3 umbauen. Ein PDB ist fest verbaut.Ich bin nun nicht sicher wir ich die Motoren bzw. ESCs anschließen muss. Kann ich den Anschluss nehmen wo GND , 5V, M 1-4 draufsteht ?
Hey Micha,
Genau, das ist der korrekte Anschluss. =)
Gruß,
Phil
Hallo,
tolle informative Website. Ich hab da mal eine Frage:
Ich hab mir auch ein scisky32 bord gekauft und einen Kopter aufgebaut. Als Funke habe ich eine Devo 10.
Ich hab die Servomitte alle auf 1500 eingestellt. Wenn ich die Sticks bewege und dann wieder in Mittelstellung gehen stimmen die Werte nicht mehr. Ich habe dann Werte von 1495 oder so. Ich denke es liegt an der Devo denn der Copter drift auch immer auf eine Seite. Was kann ich da tun?
Wenn du per Trimmung und beobachten im RX Tab genau 1500 eingestellt hast, du danach die Sticks bewegst und der dann nicht wieder auf 1500 zurück geht, liegts wohl an deiner Funke.
Hallo,ich bin auch noch neu in diesem Hobbybereich.,Ich finde es toll diese Seite gefunden zu haben.Es ist sehr übersichtlich und gut formuliert..Es sollte vielleicht noch bei den Tab:Modes die Bedeutung der Zahlen im wie von Min 900 bis Max 2100,was diese zu bedeuten haben stehen.
Auch was man evt noch machen kann wenn man nur noch 2 Aux Kanäle zu verfügung hat wie Zb bei einer wie auch meiner meiner 6 Kanal Fersteuerung !
Hey Michael,
danke für das Feedback. =) Werde ich bei Zeiten mal nachpflegen.
Hallo , hoffe hier wird noch gelesen, ich hab ein problem mit meiner walkera rodeo 150, in cleanflight bekomme ich den fehler I2C error: 4 angezeigt und die motoren laufen nicht mehr .
ich bin sicher auch nicht verstellt zu haben da ich nur mal reinschauen wollte.
Die rodeo 150 reagiert auch nicht mehr auf meine devo 7 …
vlt kann mir da jemand helfen
gruß
Oliver
Hi Phil,
Ein sehr ausführlicher und gut geschriebener Bericht! Danke! Bei mir hat sich aber ein Problem festgesetzt. Ich habe die Drohne heute erworben und habe sie mit einem Reciever bestückt. Dieser Verbindet sich auch wunderbar mit der Funke aber sobald ich in Cleanflight unter „Reciever“ schaue, verändert sich keiner der Werte (Generell bekommt die drohne keine Signale und tut nichts). Ich bin durch Videos auf das Drohnen Fliegen gekommen und bin dementsprechend sehr Neu und brauche Hilfe. Vielen Dank im Vorraus und ich hoffe, du kannst mir Helfen
Viele Grüße,
Max
Hey Max,
gerade heute habe ich das FAQ veröffentlicht mit genau deiner Frage. 😉
Schau da mal rein.
Gruß,
Phil
Hallo Phil,
mein Junior will auch in die Racecopterfliegerei einsteigen. Bisher nur Fläche und Hubi.
Deine Blog ist klasse.
Habe alles soweit eingestellt.
Habe aber noch ein Problem:
Hab eine NAZE32 rev6 mit UBLOX M8N von Hobbyking.
BestNr.571000092-0
Features:
• Super fast satellite searching, takes approximately 10 seconds to lock 6 satellite in open space
• Built-in compass, refresh rate up to 10GHz
Bei dem GPS sollte ein eingebauter Kompass drin sein?? Wie bekomme ich den zum laufen? Mein GPS funzt aber das Board erkennt den Kompass nicht?
Oder versteh ich da was falsch oder zu blöd? 🙂
Wäre cool wenn du mir helfen könntest!
Grüße Kai
Hey Kai,
Wie hast du das GPS Modul denn angeschlossen?
Hier ein Bild, wie man es anschließen sollte, wenn es die selbe Pinbelegung hat.
Gruß,
Phil
Hallo,
danke für deine Antwort. Das GPS hat nur 4 Kabel.
Habe es wie beim Naza GPS mit „Set mag_hardware=4“ probiert aber geht auch nicht.
Hab inzwischen das GPS geöffnet und da sind 2 Pins frei, beschrieben mit „A“ und der andere mit „L“.
Ich dachte mir SC“A“ und SC“L“ ?
Hab mir ein passendes 6poliges Kabel besorgt und auf den I2C Bus angesteckt aber geht trotzdem nicht 🙁
Grüße Kai
Und da soll ein Mag verbaut sein?
Lad mal ein Foto hoch von der Platine!
Hallo, hier mal das Bild. Hab ein 6 poliges kabel angeschossen. Und die mit „A“ gekennzeichneten an SDA und das mit „L“ an SCL angeschlossen. Ohne Erfolg! Werde mir zur not mal ein GPS bestellen wo wirklich ein Kompass verbaut ist und auch ein Abgang dafür hat. Gibts da Empfehlungen? Die Ublox m8n sollen ja sehr gut sein…
Hallo Philipp,
erstmal vielen Dank für deine tollen Berichte, werde nachher noch deinen anderen zu den LED Stripes im Cleanflight benötigen 😉
Aber noch kurz zu diesem Bericht. Ich habe gestern eine Naze32 mit Cleanflight mit Spektrum DSMX Sat an meine DX9 gebunden. Hat nach einiger Zeit auch geklappt. Nur waren meine Channels in der Channel Map total daneben, egal mit welcher Anordnung ich es versucht habe, die Werte waren nicht bei 1500 und auch kein Kanal stimmte. Ich habe dann soweit rumprobiert bis ich bei ATE312R4 (anstatt TAER1234) war. Nur hat da dann Roll immernoch nicht gepasst. Heute Morgen nach Neustart des Notebooks und verbinden der Naze mit Cleanflight haben alle Kanäle plötzlich gepasst und zwar mit TAER1234. Ich vermute der Neustart des Systems hat dafür gesorgt dass der Silicon Labs CP210x USB to UART Treiber richtig gelaufen ist. Evtl. könntest du nach dem Punkt der Treiberinstallation noch einen Systemneustart des Computers in den Bericht einfügen, falls du mein Problem so auch nachstellen kannst. Ggf. hilft es anderen die, wie ich auch, dann Stunden suchen warum die Channels nicht passen.
Viele Grüße,
Thomas
Hey Thomas,
also eigentlich kann die Kanalreihenfolge nichts mit dem USB Treiber zu tun haben, aber vielleicht hilft es ja trotzdem anderen Leuten.
Gruß,
Phil
Hallo Phil,
ich habe das gleiche Problem wie Thomas, allerdings verwende ich eine Micro Scisky 32bits Brushed mit integriertem DSMX- Empfänger, allerdings konnte ich das Problem noch nicht lösen. Die Channels stimmen mit ATER3124 zwar im Cleanflight-Config., aber der Kopter lässt sich so nicht fliegen (dreht sich nur im Kreis, oder flippt am Boden).
Bei F3-FCs ist mir das noch nie aufgefallen…
Hi Philipp, erstmal muss ich sagen das mir deine Übersetzung bis jetzt sehr gute Dienste geleistet hat. Danke dafür ✌?️
Hab nun leider ein kleines Prob mit Cleanflight!
Besitze einen TBS Gemini @ Cleanflight! Nach meinem letzten Flug wollte ich mir die Log Dateien ansehen und wärend Cleanflight die Daten zog ist mir mein Rechner abgeschmiert! Nun komme ich nur noch auf die CLI … Exit usw. beendet aber den Cli Modus nicht! Wenn ich mich neu verbinde komme ich wieder nur direkt auf die CLI! Copter fliegt weiterhin normal und reagiert auf Einstellungen die ich in Cleanflight eingestellt hab! Daten konnte ich alle sichern …!
Die Meldung in Cleanflight sagt: noch in grün das die MultiWi Api 1.12.0 recieved …
Dann in rot
das er diese Firmwareversion nicht supportet und das ich auf 1.13.0 updaten soll!
Wäre cool wenn du mir helfen könntest 😉
regards Treffnix
hey Treffnix,
Cleanflight entwickelt sich immer weiter und die aktuelle GUI ist möglicherweise nicht mehr mit der alten Gemini Firmware kompatibel. Gibt es da nicht mittlerweile eine Betaflight Firmware?
Hallo Phil
Erst mal Danke für die super Anleitung.
Komme aber momentan nicht weiter.
Habe den Eachine Falcon 250 pro mit der i6 funke im Set. Als fc ist ein SP racing F3 verbaut.
Wenn ich im Cleanflight verbunden bin und mein flugmodus einstelle und save drücke passiert nichts. Angel oder horizon werden nicht aktiviert wenn ich den drehpoti drehe.Der balken wandert aber. noch was.
Wenn ich das menü wechsele in CF kommt immer waiting for data. erst wenn den lipo abziehe neu connecte und dann wieder anstecke öffnet das menü.
Bin momentan echt überfordert mit meinem „tollen“ RTF- Set. Hoffe du kannst mir ein paar Tipps geben.
grüße Tom
Wenn der Status nicht übernommen wird, kalibrier mal deine Sensoren neu.
Sind alle Kanäle korrekt konfiguriert 1000 minimum, 2000 maximum?
allerbesten dank!
Hallo Phil + andere Wissensträger,
im Motors-Menü laufen meine Motoren bei ca. 1021 Millisekunden an, den Wert hab ich in Configuration / Minimum Throttle übertragen.
Kommt das Signal aber über die Fernsteuerung (Spektrum), starten sie erst bei ca. 1100 MS, entsprechend hab ich am Knüppel ca. 10% toten Weg. Was passt da nicht?
Hab als Notbehelf eine bei 8% beginnende Gasgerade programmiert.
Hallo Phil
Mein Problem ist, das die Motore 2 +3 im Vollgasbereich runterregeln, “ Tab Motore “
und stehen bleiben.
Kein Schwebeflug möglich, da Motore runterregeln und nicht wieder hochfahren,
Nach dem Absetzen und Gasgeben scheint es so daß das Board den lezten Steuerbefehl gespeichert hat.
Gruß Reiner
Hallo Sebatian,
vielleicht geht es wenn du die Bautrate änderst.
Hallo 🙂 habe folgendes Problem 🙁
bekomme Cleanflight und MAC OSX 10.6.8 nicht zum laufen…er erkennt USB und öffnet den Port stellt aber keine Verbindung zum Naze32 her… ist meine Mac Software zu alt?
Hi,
das hat mir hier schon sehr viel geholfen.
habe meine Frsky X9E mit dem Copter (XSR) empfänger verbunden habe über cleanfligt alles eingestellt… wennn ich die Funke an mache kann ich über Reciver sehen das es auch Signale abgibt.
Mein Problem ich kann trozdem nicht fliegen wenn ich die funke die drone an mache tut sich nichts außer das die Motoren die ganze zeit zucken .
was mache ich falsch ?
Hallo Phil,
danke für die rasche Antwort.
Der Empfänger ist verbunden und hat auch Strom, weil ich über den Empfänger Strom aufs Board gebe. PWM ist an , habs jetzt auch mit meiner anderen Funke versucht ( DX6i) aber das gleiche.
Es initiiert und dann piepst es nur noch.
Ich muss dazu sagen es ist nur ein Probelauf ohne Regler nur der Empfänger ist angeschlossen.
Hat das vielleicht was damit zu tun, das es erkennt dass kein Regler dran ist?
Die Regler hab ich leider noch nicht, sonst hätte ich es komplett ausprobiert.
Hallo Phil,
Ich kann mich nur allen Vorredner anschließen, deine Seite ist echt geil.
Ich bin noch ein ganz Dummi was den Naze 32 angeht.
Ich hab folgendes Problem, ähnlich wie oben schon geschrieben von Björn.
Bei mir piepst als der Buzzer und die rote LED blinkt.
Akkuwächter hab ich bei Cleanflight schon ausgeschaltet aber bringt nichts.
Ich hab auch kein Signal an den 8 Kanälen.
Sender auf PWM und bei Cleanflight auch.
Weiß nicht was ich noch versuchen soll, vielleicht nur was ganz banales was ich übersehen habe?
Gruß Stefan
Hallo Stefan,
das kann folgende gründe haben
1. Empfänger nicht mit Funke verbunden -> Failsafe
2. Empfänger hat keinen Strom – >Failsafe
3. Falsche übertragungsweise ausgewählt (PPm7PWM/SBUS) – > Keine verbidnung -> Failsafe
Also scheint es wirklich so zu sein daß er in meinem speziellen Fall im (Segel-)Flug disarmen und zu Boden fallen würde!? Oder ist die Yaw disarm Funktion vielleicht im Airmode deaktiviert?
Ja, mit einem Schalter wäre es auch umgangen, aber mir geht es mehr um die grundsätzlichen Funktionen von Clean/Beta.
Am liebsten ist mir eben Yaw/Gas arming, da es intuitiv und vom KK Board schon fast verinnerlicht ist. Bei vielen Koptern in Besitz wirds sonst schon schwierig, die ganzen Armingvorgänge im Kopf zu behalten: der nur mit Schalter wegen Airmode, der nur Yaw weil KK, der nur Pitch, weil sonst der Trikopter Propeller im Boden hängt, der nur so, der nur so….
Oje oje, was hab ich da nur angefangen… 😀
Grüße, Martin
Hallo Philipp!
Ein großes Lob an dich und diese Website! Perfekt für alle Dummies auf Ihrem Weg zu Schlaubies!
(Mich inbegriffen)
Frage:
Mein Kopter segelt im Airmode mit Gas ganz unten in der Gegend herum, und solange ich die Hangtime nutzen kann, gebe ich ganz Yaw links. Disarmed er nun und fällt vom Himmel???
Wenn ja, könnte ich das umgehen durch ‚Arming auf Schalter mappen‘, oder ist das Stick-Arming IMMER aktiv?
Weiter so,
Grüße, Martin
Hey Martin,
Danke für das Lob. 🙂 Sorry, aber ich musste etwas schmunzeln als ich das gelesen haben 🙂
Also definitiv Arming auf einen Schalter legen. Das hat auch mehrere Vorteile:
1. Mit einem Schalter bist du schneller (wichtig beim Crash)
2. Versehentlich kannst du ihn eigentlich nicht mehr disarmen
3. Bei einem Schalter bist du sicher, dass er disarmed ist.
Schöne Grüße,
Phil.
Hey eine Frage weiß nicht ob ich es überlesen habe aber ich benutze cc3d und Spektrum AR 610 mir dx6i was auch bis jetzt geklappt hat aaaaaber mein yaw ist auf einen Schalter und nicht über Knüppel wie kann ich das ändern ? Bin noch Anfänger 😉
Danke mal im Voraus 🙂
Hallo Marco,
Schau mal dieses Bild hier an. Oben links findest du „Channel Map“
Beste Grüße,
Phil
Vielen Dank für deine schnell Antwort hat geklappt 🙂
Top
Hi,
hab mir mal blheli 20a Regler geholt. Ich dachte ich könnte über cleanflight die Drehrichtung ändern. Finde aber keine Möglichkeit dies zu tun. Muss ich dafür wirklich blhelisuite downloaden? Hab einen Mac und kann es demnach nicht installieren?
Super, danke für diesen genialen Artikel.
Genau nach so etwas habe ich gesucht! Herzlichen Dank für die Mühe, die du dir hier gegeben hast! Wirklich sehr verständlich und nachvollziehbar!
Danke für diese seite . TOP
Hallo, ich brauche bitte hilfe. ich bekomme mein GPS Modul nicht zum leben in Cleanflight.
Im U Center klappt es:
Die Konfig:
Das GPS Modul ( NZ GPS u-blox 7 )
http://eu.banggood.com/Wholesale-Warehouse-NZ-GPS-For-NAZE32-Flip32-6dof-10dof-Best-For-QAV250-ZMR250-Multicopter-Quadcopter-wp-Uk-1015134.html
eingestellt ist es nach folgendem link:
https://github.com/cleanflight/cleanflight/blob/master/docs/Gps.md
mit Baud 57600
es liegt aus uart2:
Board ist ein NAze 32 Acro ( Afroflight) Rev5.
ich bekomme leider das Protokoll nicht umgestellt, auf Ublox nur NMEA, leider bekomme ich kein GPS modul angezeigt.
ICh bastel jetzut seit 2h daran. Ich würde gerne den usart 2 testen, aber wie ? kann es sein das die FC CPU ein Pegelsignal von 5v braucht (das GPS Modul haut nur ca 3V raus)
Langsam verzweifel ich.
Also Update, usart2 geht am FC. HAbe das MINIMOSD darauf gelegt. Also kann es entweder nur ein Pegelproblem oder ein Software Problem sein.
Update 2, ein Pegelwandler ist auch nicht die Lösung. ( Hatte noch ein paar Transitoren da) Aber umso mehr ich im Internet suche benutzen alle das Ublox Protokoll, leider kann ich das nicht auswählen, es stellt sich immer wieder automatisch auf NMEA zurück. Warum ?
Update 3: Der Fehler muss in der Boris B Firmware liegen. In der normalen Cleanflight Firmware 1.12.0 klappt das GPS Modul.
Hallo Philipp , erstmal Danke für deine wirklich sehr guten Anleitungen. Nach diesen war der bau meines ersten Racecopters sehr leicht doch nun habe ich ein Problem.
Der Sillabs Treiber wird auf meinem Rechner nicht erkannt!
Egal was ich mache und ich bin durchaus versiert am Rechner.
Ich kann ihn instlieren, er behauptet auch er sei einsatzfähig, doch im Gerätemanager wird er nicht angezeigt.
Kann es sein das aktuelle Mainboards mit Z97 chipsatz dies nicht unterstützen? Frohe Ostern
Hey Björn,
Gute Frage, normalerweise muss man da gar keinen Treiber installieren ich habe es nur vorsichtshalber mit dazu geschrieben.
Ein COM-Port wird auch nicht angezeigt und du kannst nicht auf die FC zugreifen?
Beste Grüße und Frohe Ostern,
Phil
Hallo Phil
Zuerst mal ein grosses Dankeschön! Super Geiler Blog Weiter so.
Ich hab nun auch zugeschlagen und mir Puffin 210 Gekauft und Dank deinem Blog bin ich auch gut vorangekommen, nur Leider habe ich ein Problem sobald er vom Usb ist geht null und nichts via Fernsteuerung das PDB leuchtet und der Naze32 Acro leuchtet nichts, Spannung ist auf dem Board etc. Empfänger hat auch Strom, am USB geht alles kein Thema Einstellungen werden beibehalten Motoren drehen mit Sender Arm/Disarm alles geht ????
Gruss Pascal
Hallo Pascal,
Das heißt wenn du USB anschließt geht dein PDB an und dein Empfänger wird auch mit Strom versorgt? Das darf eigentlich nicht sein. Da scheint bei dir irgendwo eine Rückführung zu den Kompontenten sein.
Soviel Power wird dein USB Port auch gar nicht leisten können.
Es ist schwierig aus der ferne zu beurteilen woran es liegen mag. Du kannst hier aber auch Fotos hochladen und ich schaue mir mal deine Verkabelung ab. Am besten du schriebt hier auch einmal ganz genau was du wo angeschlossen hast.
Beste Grüße,
Phil
Hallo Phil
Danke für deine Antwort. Ich hatte ihn normal mit Akku und USB angeschlossen sobald er vom USB weg wahr ging nichts mehr, Empfänger hatte Strom und PDB hatte Strom und auch der Naze32 hatte Strom anliegen (nachgemessen) nur eben keine Led hat geleuchtet und keine Reaktionen. Ich habe nun ein neuer Naze32 und alles ist OK und er Fliegt hehe!!! Für deine Mühe Nochmals Danke.
Gruss Pascal
Hallo Phil
Ich habe meinen ersten Naze32 Acro zusammen gebaut. Dein Handbuch war dabei eine grosse Hilfe. Vielen Dank für deine Arbeit.
Nun habe ich aber ein Problem, wo ich nicht weiter komme.
Wenn ich mit der Fernsteuerung Gas gebe und auf einer niedrigen Stufe stehen lasse, gibt er selber Gas. Das Komische ist auch, dass jeder Motor anders dreht. Manchmal bleiben einzelne sogar stehen. Laut deinem Handbuch habe ich alles richtig eingestellt.
Hast du eine Idee oder Lösung?
Gruss Joel
Hey Joel,
im acro Modus sollte das nicht der Fall sein. Im Horizon oder Angle Modus ist das ganz normale, da er versucht auszugleichen. Schon mal Propeller drauf gehabt und einen kleinen Testflug gemacht? 1m hover im Keller reicht ja schon um zu sehen ob alles läuft.
Beste Grüße,
Phil
Hallo Phil,
ich habe meinen Vortex jetzt schon seit geraumer Zeit wieder vom Händler zurück bekommen, komme aber leider erst jetzt dazu das Rätzel aufzulösen. Das Problem mit dem nicht speichern lag daran, dass der Vortex im OSD Menü im Setup Modus stand und da ich noch keinen OSD Bildschirm und auch keine Brille habe, konnte ich das nicht erkennen. Wenn der Vortex im OSD Menü im Setup Modus steht, lassen sich keine Einstellungen im Cleanflight speichern!! Hoffe das alle die den selben Fehler haben, damit weitergeholfen ist. Gruß Andi
Interessant, danke für die Rückmeldung!
Hallo,
Vorhanden ZMR250, Naze32 Acro,
Als XQuad mit Cleanflight
folgende Frage…… Bei der Naze32 Acro muss ich an den Motorenausgängen die zu den ESC führen…. Motor 1 an Ausgang M5, Motor2 an Ausgang M6, Motor3 an M3,
Motor4 an M4 anschließen damit die Motoren laufen.
M1 und M2 bleiben frei.
Kann es sein dass sich trotz Konfiguration von Cleanflight das Board sich im Servo Mode befindet?
Wenn Ja, wie stelle ich das um dass ich in den Standart Mode komme?
Dann könnte ich ja wie vorgehabt über M5 die LED ansteuerung verwenden….
Gruß Walter
Hallo Walter,
Also, die ESCs musst du wie folgt anschließen:
ESC Motor 1 -> Naze32 Ausgang 1
ESC Motor 2 -> Naze32 Ausgang 2
ESC Motor 3 -> Naze32 Ausgang 3
ESC Motor 4 -> Naze32 Ausgang 4
Die LEDs steuerst du über den Kanal 5 an wenn du SPPM oder SBUS nutzt.
Schau mal hier:
http://blog.seidel-philipp.de/wp-content/uploads/2015/11/naze32_rev6_anschlussplan.jpg
Die Seite hat mir echt geholfen, Danke !
Hallo Philipp,
genialer Artikel, der mich erst davon überzeugt hat Cleanflight zu nehmen.
Ich habe jedoch folgendes Problem: Wenn ich „No reboot squence“ aktiviere kommt jedesmal beim flashen die Fehlermeldung „no response from the bootloader, programming failed“. Deaktiviere ich die Funktion flasht er und ich kann anschließend connecten und alle Daten sehen.
Woran liegt das?
Beste Grüße
Philipp
Hi Phil,
Ich wühl mich grad durch sämtliche Seiten, bis ich auf deine hier gestoßen bin. Ist bisher die beste!!
Ein paar Dingne hab ich dennoch nicht gefunden:
1. Ich habe ne Jeti Steuerung und im Mode 1.
Jetzt sind alle Stick an die Bewegungen der Maske im Cleanflight angepasst, ist aber umständlich. Gibts da nicht was, damit ich in Cleanflight die Stickbewegung auf mode 1 bringen kann?
2. ICh bekomm die Motoren nicht zum Laufen über die Funke. Über die regler geht´s aber.
Wie meinst Du das mit dem Armen und Disarmen via Stickbewegung (links unten…) muss ich das einlernen?
Es grüßt das Frankenland
Hallo Franz,
http://blog.seidel-philipp.de/handbuch-cleanflight-configurator-naze32/#Tab_Receiver
zu 1.
Damit in Cleanflight deine Sticks auch zu deiner Funke passen, gibt es den „Channel Map“ da musst du es anpassen. Ein anderer Weg bleibt dir nicht, außer die Kanäle in deiner Funke auf die Cleanflight Reihenfolge anzupassen. Ich würde aber ersteres empfehlen.
2. Was für Stickwege min/max hast du denn im Reiter Receiver?
Genau das War der Fehler……
Dankeschön
Jetzt läuft Gruß Michael
Hallo, erstmal dickes Lob für die ganze Zeit und Arbeit.
Ich habe mir den Virus ganz neu eingefangen und nun komme ich nicht weiter…….
Ich möchte mein naze32 afro rev5 mit cleaflight Flash. Aber ich bekomme keine Verbindung zum FC.
Ich habe zum probieren mal baseflight getestet und da War es kein Problem mit dem verbinden. Aber flashen ging auch nicht.
Wo liegt das Problem. Kannst du mir das erklären?
Gruß Michael
Hey Michael,
was für Optionen und Haken hast du denn unter „Firmware Flasher“ aktiviert?
Probier es mal nur mit „Full Chip Erase“ aktiviert.
Beste Grüße,
Phil
Hi Phil,
Dein Blog und das Handbuch zu cleanflight ist eine große Hilfe. Ich hab die Naze32 rev 6 mit einem auf cppm geflashten X4R SB verbunden – der Empfänger ist auch mit der Taranis verbunden. Dennoch bekommt der Empfänger von der Naze keinen Strom. Hab sogar schon die Naze getauscht und die Lötstellen kontrolliert … Nix hat geholfen. Hast Du noch eine Idee??
Beste Grüße,
FabiFX
Hey FabiFX,
lass mich raten, du hast deine Naze per USB angeschlossen und er Empfänger geht nicht? Schließ mal 5V an einen der Motor/PWM Ausgänge an. Dann sollte der Empfänger auch Strom bekommen.
Beste Grüße,
Phil
Super Anleitung!
Nur habe ich ein Problem: Auf Kanal 1 beim Empfänger ist bei mir die Roll Achse hinterlegt nur wenn ich im reiter receiver bei cleanflight nachschaue ist der Kanal nicht vorhanden dementsprechend kann ich die Roll achse nicht bedienen Wie kann ich dies ändern?
Unter Openpilot z.b. sind alle Kanäle vorhanden.
Meine FC ist eine cc3d und der Empfänger von Turnigy GY-ia6.
verbunden sind diese über den input Kanal der FC.
Gruss Melf
Hallo Phil
Ich dank dir für die sehr hilfreichen Anleitungen die du geschrieben hast. Ich hab no nie zuvor irgend etwas in der Art gebaut. Hat aber auf Anhieb geklappt und fliegen tuts auch!!!?
Sehr schöne Website,viel angenehmer als Stundenlanges Sufu in irgendwelchen Foren.
Gruss Matthias
Ich habe noch nie eine so simple und gute Erkärung der PID Werte wie bei Dir gefunden! Tolles Handbuch. Ein großes Dankeschön!
Super Anleitung aber beim flashen von 1.10.0 naze
bekomme ich die fehlermeldung
No response from the bootloader,programming failed ?
Das heist jetzt ?
Hallo Martin,
Hast du die Hacken alle so gesetzt wie im Foto beschrieben?
Folgendes kannst du versuchen:
1. Bootloader Pads überbrücken
2. Flash on Connect
3. Punkt 1 und 2 zusammen 😉
LG,
Phil
1. Bootloader Pads überbrücken
2. Flash on Connect
Wenn ich alle punkte zusammen machen dann geht es ohne probleme… Danke
Jetzt noch einstellen, und mal sehen ob er auf der yaw achse besser dreht..
Hallo zusammen.
Ich komme aus der helifliegreie und möchte mir jetzt einen Racer zulegen und da mal reinschnuppern. Erst mal vielen Dank für die super anleitung. Funktionier die auch beim Nighthawk 280 mit der Skyline32 Flugsteuerung? Sollte eigentlich schon wenn ich mich richtig belesen habe!
dann noch eine frage zur Steuerung eines racers. Du schreibst:
Hier die Kanalübersicht einer Funke im Mode 2:
linker Stick hoch runter = Throttle (Gas)
nach unten = 1000
nach oben = 2000
Kenne ich vom Heli als Pitch(auf/ab)
linker Stick links/rechts = Yaw (Drehen)
nach links = 1000
nach rechts = 2000
Kenne ich vom Heli als Heckrotor
rechter Stick hoch/runter = Pitch
nach unten = 1000
nach oben = 2000
Kenne ich vom Heli als Nick
rechter Stick links/rechts = Roll
nach links = 1000
nach rechts = 2000
Kenne ich vom Heli auch als Roll!
Wie beschleunigt ihr eure Racer nach vorne, eben NICK?
vielen Dank schon mal.
Gruß
Rudi
Hallo Rudi,
die Skyline32 ist ein Naze32 Clone. Deswegen läuft alles was auf der Naze32 läuft auch auf der Skyline32.
Also Cleanflight, Betaflight und Co.
Zu den Sticks.
Du kannst mit Pitch (Nick) den Copter nach vorne kippen. Dadurch leigt der Copter steil in der Luft und bekommt dadurch mehr Geschwindigkeit. Das Kippen wird vollautomatisch von der Flugsteuerung gemacht, die die Motoren unterschiedlich schnell ansteuert.
Das gleiche passiert bei Roll und YAW. Alle „Achsen“ sind also gleich belegt mit einem Wert von 1000 bis 2000. 1500 ist dabei die Neutralstellung. YAW (drehen), Roll(rollen) und Pitch(nicken) auf 1500 sollte der Copter gerade in der Luft schweben. Die Höhe muss ständig mit Throttle reguliert werden.
Hoffe ich konnte es einigermaßen erklären.
Phil
Hallo phil,
ja das begreife ich also doch wie beim Heli.
Danbke schon mal.
Gruß
Rudi
Ich sag einfach mal Danke für diese Anleitung. Da tut man sich als
Anfänger schon mal viel leichter, vorallem wenn mans mit den Fremdsprachen
nicht so wirklich hat. Super Sache !!!
Gruß Hendrik
Danke für die super Anleitungen.
Gruß Norbert
Hallo Phil
……..deine Anleitung ist super ausführlich, habe alles zum einstellen bekommen und habe ein Backup gemacht. Jetzt kommt mein Problem, alle Einstellungen die ich mache sind nachdem ich den Akku neu einstecke wieder weg. Machen dann ein Restore und dann geht alles wieder. Hast Du eine Idee????
Gruß Andi
Hey Andi,
du musst auf jeder Seite auch nach dem Einstellen auf „save“ drücken. Den Button findest du ganz unten. Erst nach dem drücken dieses Buttons werden die Werte an die Flugsteuerung geschickt und gespeichert.
Gruß,
Phil
Hallo Phil
…danke für die schnelle Antwort. Speichern hab ich natürlich gedrückt, sogar mehrmals!!! Bringt nix, hat laut Anzeige gesichert und Reboot gemacht und wenn die Akku ausgesteckt und wieder eingestekct wird is alles wieder weg. Gruß Andi
Was für eine Flugsteuerung nutzt du?
Welche Firmware ist drauf?
Hast du mal versucht die Firmware neu aufzuspielen und dann alles per Hand (ohne Einspielen von Backup) zu konfigurieren? Eventuell gibts ein Problem mit dem Backupfile.
Hallo Phil
….vielleicht hab ich ja grundsätzlich was falsch gemacht. Ich fang mal ganz vorne an. Ich hab einen Vortex mit einem orange r615x gebraucht gekauft und wegen der geringen Reichweite einen Spektrum AR7700 reingebaut (Sender DX9). Dafür hab ich mit Cleanflight die NAZE32 (1.10.0) Software und über RC Toolls die 1.0.0.15 ( die 1.0.0.21 ging auch nicht) draufgespielt. Wenn ich nun in Cleanflight z.b. die Modulation auf PPM umstelle damit meine Anlage (Empfänger) überhaupt mit dem Copter spricht, funktioniert auch die Anzeige aller Kanäle, nur eben wenn ich den Akku wegstecke sind auch meine Einstellungen wieder weg, trotz (store) Taste. Gruß Andi
Hmh, irgendwas stimmt da mit deinen Firmwares nicht.
Ich wurde mal folgende zwei Setups ausprobieren.
Stabile Firmware:
Vortex Firmware v1.0.0.21
Cleanflight v1.9.1
EzUHF Firmware v1.52
Oder als Beta:
Vortex Firmware 1.0.0.22
Cleanflight 1.11.0
Wenn beide Setups das selbe Problem haben, kann es fasst nur ein Hardware Problem sein.
Beste Grüße
Hallo Phil
………Sorry, Sorry, Sorry, war nur so verzweifelt das ich nicht fliehen kann, dass ich vielleicht ein bisschen ungeduldig war. Keine böse Absicht, ich weiß so was macht viel Arbeit!!!
Ich werde das mit der Software mal ausprobieren und berichten, was ich bis heute nicht hinbekommen habe ist das mit der EzUHF Firmware, kannst Du mir sagen mit welchen Programm man das aufspielt? Mit RC Tools hat es nicht funktioniert!!
Gruß Andi
Hey Andi,
klingt doof aber eigentlich muss es mit RC Tools funktionieren.
Mir fällt gerade ein, dass ImmersionRC eine Chromeapp herausgebracht hat. Probiere das doch mal.
https://chrome.google.com/webstore/detail/vortex-configurator/jelolponpnnidoojekihdojjdjphdeog/related
…..alles probiert, es ist zum kotz…… Werde ihn wol einschicken müssen, mir fällt nicht mehr ein? Dir? Gruß Andi
Wenn es nicht geklappt hat, ist das wohl die letzte Möglichkeit.
Hab ihn weg geschickt, sobald ich weiß an was es gelegen hat melde ich mich. Gruß Andi
….hab ich mich jetzt falsch geautet, dass ich einen Vortex fliegen und keinen NAZE32, weil ich keine Antwort mehr bekomme? Gruß Andi
Also ich habe vor geraumer zeit mal was angefragt und die Seite gelobt. Darauf kam auch nie eine Reaktion. lediglich auf Lobeshymnen habe ich kurze Reaktionen gelesen. Er scheint bei einfachen Sachen noch zu unterstützen aber an der Seite tut sich schon länger nichts wesentliches….
das soll ein wertfreie Feststellung sein! Jeder muss sich seine Zeit so einteilen wie er es für sinnvoll erachtet.
Finde es nur Schade, da die Basis super ist.
Danke für die ehrliche Meinung.
Was hattest du denn abgefragt? Vielleicht habe ich es übersehen. (Würde ich gerne nochmal darauf eingehen) 😉
Bitte beachte, dass das ist hier auch kein offizielles Support Forum ist, ich nicht alles weiß und ich es nur als Hobby betreibe.
Ich veröffentliche regelmäßig Artikel, deswegen kann ich deine Äußerung
„aber an der Seite tut sich schon länger nichts wesentliches…“
nicht wirklich nachvollziehen.
Ja, in dem Handbuch sind noch Themen offen, aber ich habe auch noch ein privates Leben und andere Projekte. 😉
Ich bin nicht wirklich ein guter Schreiber, deswegen fällt mir das verfassen von Artikeln oft schwer und braucht halt mal etwas länger.
Beste Grüße,
Phil
Hey Andi,bin einfach über die Feiertage nicht dazu gekommmen. 😉
Hallo
Im Menü PID Tuning gibt es den Tab PID Controller…
Die verschiedenen Auswahlmöglichkeiten….sind das einfach PID-Vorschläge, oder hat es damit etwas anderes aufsich?
Die verschiedenen PID-Controller sind teilweise sehr unterschiedlich. Der PID-Controller berechnet mit den eingestellten Werten das Flugverhalten und Ansteuerung.
Du kannst dir einen aussuchen oder den voreingestellten drin lassen und schauen welcher dir am besten gefällt.
Hier erfährst du mehr zu dem Thema: https://github.com/cleanflight/cleanflight/blob/master/docs/PID%20tuning.md
Hi Andre,
Vielen Dank für diese sehr versändliche Anleitung! Ich bin absoluter Neuling und mit 65 J. auch nicht mehr der Jüngste,habe aber meinen Quadrocopter dank Deiner Anleitung gut zum Fliegen gebracht!
Habe leider noch folgendes Problem:Ich möchte gern ein GPS einbauen,bekomme es aber nicht hin.Ich habe einen Skyline32 ADVANCED Flightcontroller(Nace 32 kompatibel)eingebaut und eine Mini GPS Antenne Ublox 7 mit 4 Ansclüssen.Den Controller habe ich per CPPM mit dem Empfänger verbunden und die GPS antenne müßte auf Kanal 3(TX) und Kanal 4(RX) verbunden werden.Es zeigt aber Im Cleanflight nichs an!
Hey Phil,
danke für das Handbuch, dank dir fliegt mein Copter vorbildlich, dake dafür.
Bzw muss ich sagen flog, habe folgendes komisches Problem:
Meine Motoren haben komischerweise nur noch ca 30-40% ihrer Leistung und stottern arg wenn sie unter volllast sind.
Schliesse ich die Skyline 32 aber ans Cleanflight an und jage die Motor via Masterregler hoch, haben sie volle Leistung.
Im prinzip kann ich doch davon ausgehen das Motor und esc’s schon mal in Ordnung sind oder?
Inwieweit der FC bei dieser art der Ansteuerung noch eingebunden ist, vermag ich nicht zu sagen.
Ich vermute das Problem beim Empfänger oder der FC….hast du evtl ne Ahnung woran es liegen könnte??
Danke im voraus
Andre
Hey Andre,
Er flog ja mal vorbildlich, sagst du. Hast du etwas geändert (Hardware/Konfiguration/Crash) bevor der Fehler aufgetreten ist oder kam das plötzlich?
Schau mal ob es an deinem „maximal throttle“ Wert liegt.
Beste Grüße,
Phil
Hi Phil,
sehr gute Arbeit deine Anleitung!!!
Ich habe bei meinem Quad mit Naze32 folgendes Problem:
Wenn ich eine längere Strecke 100-200 Meter in der gleichen Lage Vorwärtsflug mache und am Ende dann den Stick loslasse, sodass der Quad sich wieder gerade stellen sollte, passiert folgendes.
Der Quad denkt die null Stellung der Funke wäre Rückwärtsflug. So als ob sich der Gyro in dem Vorwärtsflug neu auf null kalibriert hätte, und dann wenn ich den Stick nach hinten lasse er sich auch nach hinten bewegt.
Also muss ich dann den Stick nach vorne schieben um wieder in eine horizontale Position zu gelangen. Weil ich mit dieser Situation als Anfänger überfordert war, bin ich jetzt schon 3 mal abgeschmiert. Langsam ist das nicht mehr lustig…:-(
Hast du zufällig eine Ahnung woran das liegen könnte?
Ich hoffe man kann verstehen was ich meine, obwohl ich es sehr laienhaft beschrieben habe.
Danke
Gruß Max
Hey Max,
in welchem Modus fliegst du denn?
Ich habe das Problem im Horizont und im Angle Modus.
Hallo,auch von mir großes Lob für deine Anleitung.
Mein Kopter mit Flip32fliegt schon ziemlich gut.
In Cleanflight schaffe ich es nicht im Reiter Sensoren eine Darstellung zu bekommen. Raus komme ich da nur durch disarmen???
Auch mit den LEDs klappt das nicht. Farben erreiche ich nur zufällig und treffe auch die falschen Leds.
ICH freu mich schon über eine Anleitung für „Dummis“ wie mich.
LG Dieter
Super Anleitung, ganz dickes Lob.
Jetzt klappt das auch mit den Flickflack.
Ohne deine Anleitung würde sich immer noch kein Motor bei mir drehen
FETTES DANKE
Das freut mich. Danke für das Feedback.
hallo,
ich habe Probleme mit dem BT Modul! Es läuft alles prima aber wenn ich CF disconecte ist die Funke vom Kopter getrennt und ich muss den Akku abtrennen um neu zu starten. Ich benutze die Firmware 1.8.
Hi Phil
Fettes Danke und ein Riesen Respekt für deine Arbeit hier. Du tust vielen neuen Leuten einen Riesen Gefallen mit deiner Arbeit hier. Bitte weiter so. Für doch mal ein Spendenkonto ein auf das jeder Freiwillig spenden kann. 😉 Lg Ralf
Vielen Dank Ralf für das Feedback. Das motiviert mich sehr!
Einen Spendenbutton könnte ich mal ein bauen. Ansonsten kann man hier etwas spenden. https://www.paypal.me/ps915/
=)
Klasse Arbeit, die du hier gemacht hast!
Gibt es eine Möglichkeit, dass die Motoren Töne abgeben, z.B. wenn die Calibrierung abgeschlossen ist, oder wenn man Trimmen will? Ich habe bisher keinen Buzzer angeschlossen.
Dirk
Das ist mit Cleanflight leider nicht möglich, soweit ich weiß!
Super Anleitung, wann geht es weiter 🙂
Hallo,
tolle Anleitung. nur vermisse ich z.b. die felhlercodes, was welches blinken bedeutet oder was welches piepsen.
meine naze32 piepst und blinkt und bis jetzt kann mir keiner sagen warum….
grüße Björn
Hallo Björn,
gute Idee. Werde ich umsetzten.
Zu deinem Problem: Deaktiviere mal „Battery Voltage“
Findest du unter dem Tab: Configuration -> Battery Voltage“
http://blog.seidel-philipp.de/handbuch-cleanflight-configurator-naze32/#Tab_Configuration
Beste Grüße,
Phil
Super Arbeit, find ich sehr klasse.
Danke
Vielen Dank für das Feedback!
Hi Phil,
Respekt für die ordentliche Mühe. Lese hier gerne, danke.
Bist du schon wieder am weiterschreiben?
Ich würde gerne die Modes beschrieben bekommen. Bzw zwei bedtimmte:
Auto tune und in flight calibration.
in Fight calib habe ich mal getestet, dabei wurden meiner Meinung nach die pids verstellt (flog danach zittriger).
Bei cleanflight ( https://github.com/cleanflight/cleanflight/blob/master/docs/Modes.md ) steht das aber unter autotune beschrieben. Ich dachte autotune ist für die levelcalibrierung wärend des Fluges?!
Wäre super wenn ich das bald hier nachschlagen könnte :-))
Beste Grüße und danke
Peter
Hey, danke für deine Hilfe. Mittlerweile funktioniert alles. Jetz hab ich nur noch eine frage und zwar sobald ich ihn arme und ihn neige z.b wenn ich ihn in da hand halte oder so dann fangen paar motoren an sich schnellet zu drehen aber immer nur einen kurzen moment. Ist das verhaltrn normal?
Das ist normal. Der Copter reagiert auf die Lageänderung und möchte diese, durch ansteuern der Motoren, ausgleichen.
Hey, ich habe irgendwie keine ahnung wie ich meinen quadrocopter scharf schalte. hab naze32 und alles über diese anleitung eingestellt. Pid werte hab ich erstmal so lassen. Muss ich bei modes was einstellen bei arm? Wenn ja wie weiß ich dann welchen aux und so. Bitte im hikfe
Hallo Tom,
das scharfstellen habe ich gestern Abend noch hinzugefügt.
Findest du in folgenden Kapitel ganz unten:http://blog.seidel-philipp.de/handbuch-cleanflight-configurator-naze32/#Tab_Receiver
Ich hoffe, ich konnte helfen.
Danke dir schon mal,, werde es am WE noch mal testen,, wenn ich die Motoren
gegeneinander tausche ( mit den Drehrichtungen ) dann müßte ja ein anderer Fehler auftreten oder?
Danke mfg
Hallo danke für den super Bericht ,, ich hab aber ein Problem ,wenn du mir evt. dazu noch einen tip geben kannst?
Habe einen Quadcopter mit 70cm Durchmesser gebaut… Ich habe die Laufrichtungen,die Propellerseiten überprüft.. Alles ok. Aber der Copter dreht
ständig über die YAW ( Gier) Achse nach rechts.. Ich kann einstellen was ich will..
Hast du da noch eine Idee was ich machen kann ? Danke schon mal
Hallo Wilfried,
Wie doll dreht dich der Copter? Nur ganz langsam?
Folgende zwei Ursachen könnten vorliegen:
1. Die Mitten der Funke sind nicht genau eingestellt. Dadurch erhält der Copter immer einen Befehl, dass der Copter sich über die YAW Achse drehen soll.
Du kannst in Cleanflight unter dem Tab „Reciever“ schauen was deine Funke in Mittelstellung an den Copter sendet. Genaueres findest du hier:
http://blog.seidel-philipp.de/handbuch-cleanflight-configurator-naze32/#Tab_Receiver
Die korrekte Mitte kannst du in den meisten Funken per „Subtrim“ einstellen.
2. Es könnte sein, dass ein oder mehrere Motoren zu wenig Umdrehungen liefern. Drehen alle Motoren gleich flüssig wenn du sie per Hand drehst?
Ich hoffe ich konnte helfen. Freue mich auf eine Rückmeldung.
Phil
Sehr gute anleitung.Danke dafür ! …Und natürlich weiter so! 🙂
Hey Phil, ich bin s nochmal 🙂
Die Möhre fliegt soweit und ich hab einen Riesenspaß!! Danke für den Support!
Ich fahre die devo7e und ein naze32.
Auf dem naze gehen mir langsam die Pins aus.
Ist es möglich(unter Verwendung der deviation-software und einem entsprechenden Empfägner)
PPM anstelle PWM zu übertragen?
Gruß ph
Hallo auch Ph ja die funke devo 7e mit der deviation software kann ppm , ich hoffe nur das hast du auch die diode ungelötet und damit die reichweite erhöht,
Hallo Phill
vielen Dank für die Arbeit die du dir hier machst. Ich finde eine Anleitung in deutsch wirklich klasse denn nicht jeder ist so gut in Englisch um die ganzen Fachbegriffe zu übersetzten.
Ich wäre dir sehr dankbar wenn du zu den Flugmodes mehr Infos geben könntest, da es sehr viele gibt. Brauch ich die alle? Was ist der Stabilisierungsmode und wie funktioniert das mit Autotune genau?
Das wären so Sachen die mich noch interessieren würden.
Viele Grüße Helmut
Hej Phil,
führst du das Handbuch weiter??
Hey Marcus,
das Handbuch wird natürlich weitergeführt. Derzeit bin ich aus zeitlichen Gründen nicht in der Lage dazu. Ab Ende Juni wird es wahrscheinlich weitergehen.
Ich hoffe, ihr habt solange Geduld! 😉
Hallo,
gibt es die möglichkei dieses tolle handbuch als PDF oder so zu bekommen damit man es Drucjken kann?
MFG steven
Ich habe einen entsprechenden Button eingefügt.
Du findest einen grünen „Print Friendly“ Button am Ende vom Artikel.
Top sache. Bitte weiter machen im Handbuch.
@Tobias,
Wenndu den Kopter mit der Fernbedienung starten kannst, muss ja noch ein Empfänger angeschlossen sein.
Mein Tipp: Alle Komponenten von der Naze32 trennen, bis auf die Spannungsversorgung.
Dann testen ob es noch funktioniert. Wenn ja, einzelne Komponenten anschließen und immer wieder testen ob die Verbindung funktioniert.
Hallo,
ersteinmal tolle Anleitung. Habe aber folgendes Problem, sobald ich den Flugakku anschließe, verliert die Naze32 die Verbindung zu Cleanflight und ich kann nichts mehr einstellen. Woran kann das liegen?
Hallo Tobias,
kann irgendein Masseproblem sein.
Kannst du dich verbinden, wenn du nach dem Lipo die USB Verbindung erneut anschließt?
Hallo Phil. Nein das geht leider auch dann nicht mehr. Sobald der akku angesteckt ist geht die rote Led aus. Nur noch die blaue led bleibt an. Ich kann dann zwar den copter mit der Fernbedienungen einschalten. Aber wie gesagt, zum Rechner kommuniziert er nicht mehr. Auch an nem tablet mit ezgui macht er das selbe spiel.
OK, das sollte so eigentlich nicht sein. Komisch dass der Copter sich starten lässt. Ich hätte auf einen Kurzschluss getippt.
Welche Versorgungsspannung liegt am Naze32 bei dir an? Und wie hast du sie abgeschlossen.
Versorgungsspannung sind 5 V kommen direkt vom Nucleus PDB bzw vom BEC der Regler. Was noch angeschlossen ist, ist ein MinimOSD über die RX/TX pins auf der mitte der Platine. Kann hier der Übeltäter stecken???
Hallo
Wow Super -Anleitung , jetzt kann ich ja ma meine naze32 in Betrieb nehmen ,nach 4 Jahren Multiwii
Hallo Sinnforfer,
da bleibt dir nichts anderes übrig als neu zu flashen. Du könntest es versuchen über die UART Pins auf dem Naze32 Verbindung zu erlangen, aber neu flashen führt wohl etwas schneller ans Ziel.
Wie das flashen funktioniert, wenn man keine Serielle Verbindung mehr herstellen kann, habe ich hier beschrieben.
http://blog.seidel-philipp.de/naze32-unbrick-hard-reset-anleitung/
Ich hoffe ich konnte helfen,
Beste Grüße,
Phil
Hallo Phil,
yep.. ich habe inzwischen neu geflashed.. mit den Bootloader-Pads hat es dann geklappt.
Läuft inzwischen alles wider.. sogar BT und GPS gehen auch.
Danke.
Super! 🙂
Ich habe mir irgendwie die USB-Schnittstelle „abgehängt“, indem ich die UART1 auf „unused“ gesetzt habe.. (bevor ich diesen Artikel hier fand), weil ich dachte dann würde BT ans laufen kommen.
Habe aber leider nicht richtig überlegt…
Wie kann ich das wieder zurücksetzen, ohne das ich „connecten“ kann?
Geht das also irgendiwe mit neu flashen, oder mit den Pads?
Wäre klasse, wenn Du mir helfen könntest.
Hey Phil!
Saugut, deine Infos. Danke dafür!
Ich bin blutigster Anfänger. Krieg meinen Quad nicht ge-ARMED
Im Cleanflight GUI kann ich die Motoren bewegen, und sehe, dass Fernbedienung und Empfäanger funktionieren.
Einmal hat das armen geklappt, ich weiß aber nicht mehr wie und warum.
Wie man munkelt ist der linke Stick auf der Funke einige Sekunden
nach rechts unten zu halten.
Meine Stickbelegung:
Throttle und Pitch steigen, wenn ich die Sticks richtung 12 Uhr bewege.
Throttle linker Stick, Pitch rechter Stick.
Yaw(linker Stick)nach links, und der Wert nimmt zu.
Roll(rechter Stick) nach links, Wert nimmt zu.
Ich glaube Yaw und Roll müsst ich noch invertieren ..?!
Dann sollte das Quad doch trotzdem armen, wenn ich den linken Stick nach links unten halte.
Mein 2. Versuch war nun aux1 zu benutzen.
Unter Modes hab ich Aux1 auf arm gemapped.
Unter „Receiver“ seh ich, dass sich was tut, wenn ich den kleinen Schalter an der Funke bediene (1099-1899).
Dachte, wenn ich unter Modes Arm Aux wähle, und die Fader so verschiebe, dass der gesamte Bereich gelb ist. Müsste der Quad automatisch armen, da beide Schalterstellunge innerhalb des gelben Bereichs sind. Klappt aber leider nicht.
Hast du vielleicht ne Idee, was ich vergesse haben könnte?
Hey,
hier sind die korrekten Werte wenn du eine Fernbedienung im Mode 2 hast
Kanalübersicht im Mode 2
linker Stick hoch runter = Throttle (Gas)
nach unten = 1000
nach oben = 2000
linker Stick links/rechts = Yaw (Drehen)
nach links = 1000
nach rechts = 2000
rechter Stick hoch/runter = Pitch
nach unten = 1000
nach oben = 2000
rechter Stick links/rechts = Roll
nach links = 1000
nach rechts = 2000
Roll Pitch und Yaq sollten wenn man die Sticks nicht bewegt auf 1500 stehen.
Zum Thema arming:
Ich mache das arming nicht per Schalter sondern per Stick, genau wie du es schon gemacht hast.
Das geht wie folgt:
Links Stick nach unten rechts: Multicopter ist scharf
Linker Stick nach unten links: Multicopter ist nicht scharf
Das hat folgende zwei Vorteile:
1. Du sparst dir einen Kanal
2. Nach ein paar Sekunden wird das arming disabled wenn du keine Stick-Bewegung machst. Ist ein kleines Sicherheitsfeature.
Ich mache das bei meinem Naze32 auch über den linken Stick und bin damit sehr zufrieden.
Ich hoffe ich konnte weiterhelfen. Bin gespannt ob es nun klappt bei dir!
Beste Grüße
Phil
Danke!
Hätt mir mal vorher deine ganze Anleitung durchlesen sollen 🙂
Er läuft!!
Hab die devo7e Funke
Hab Roll und Yaw invertieren müssen
(function menu -> Reverse Switch)
und die Ausgabe der Funke überall auf 125% hochschrauben
(function menu -> Travel Adjust)
Jetzt klappt auch das Armen mit Stick. prima Sache 🙂
Morgen dann erster Flugversuch..
Grüße ph
Sehr gut.
Wünsche einen erfolgreichen Erstflug.
Und vergiss nicht es zu filmen. 😉
Danke, ich warte noch auf 330er 16×14 Carbon Rohre.. dann kann ich wieder fliegen… und meinen zweiten aufbauen.
KLar.. filmen werde ich… auch wen es noch kein FPV ist…. aber ich arbeite dran.
Hallo R. Kirsten
Vielen Dank für das Feedback. Ich werde versuchen das Handbuch in der nächsten Woche weiter zu schreiben und ganz oben auf der Liste steht dann die LED-Konfiguration.
Hast du bei der LED Konfiguration spezielle Fragen auf die ich genau eingehen soll?
Phil
Hallo Philipp,
ein super Bericht. Danke dafür! Dennoch wäre es schön wenn du evtl. nochmal eine Anleitung schreiben könntest über die Konfiguration der LED’s
Hi Phil,
danke nein, nur halt so, das es ein blutiger Anfänger versteht. Das wäre schon wirklich gut. Riesen Dank schon mal vorab!
Bis demnächst R.