
BLHeli Suite Einstellungen erklärt

In diesem Beitrag möchte ich etwas über die Einstellungen der BLHeli Suite schreiben. Die Einstellungen beziehen sich auf die BLHeli Suite 16.0.14.5.0.1.
Einige Punkte sind noch nicht bis ins letzte beschrieben oder es bedarf noch einer Überarbeitung. Wenn ihr selber eine bessere Beschreibung oder Ideen für einzelne Punkte habt, würde ich mich freuen, wenn ihr diese in den Kommentaren postet. Dann können wir gemeinsam an dem Artikel arbeiten. =)
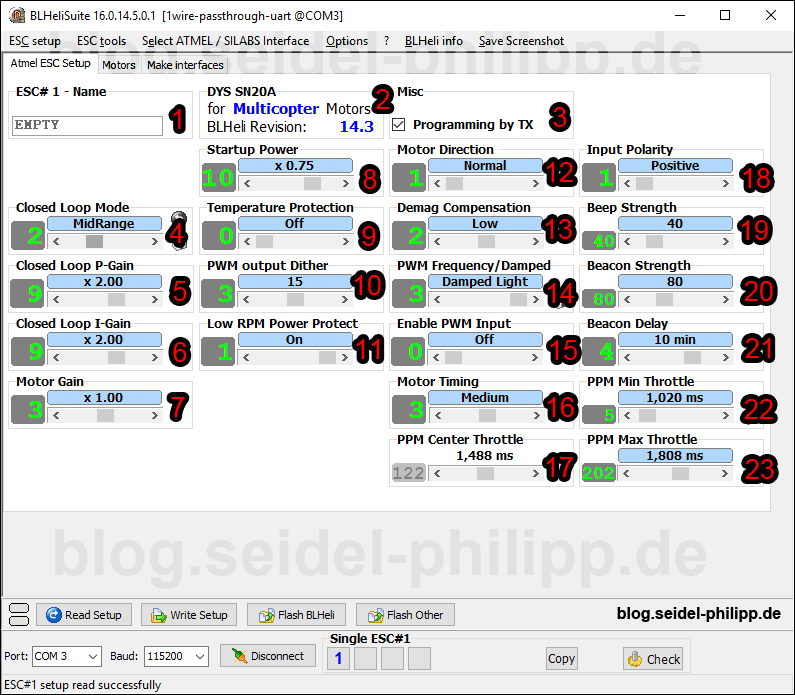
1: ESC Name
Mit dieser Option kannst du deinem ESC einen Namen zuweisen, zum Beispiel „M1“ oder „vornelinks“.
Besonders sinnvoll, wenn du deine ESCs via One-Wire- Passthrough flashst und du nicht direkt weißt, welcher Regler gerade ausgewählt wurde.
2: ESC Infos
ESC Modell sowie installierte BLHeli Version. Außedem wird angezeigt für was für eine Art Modell der ESC konfiguriert ist. In diesem Fall für Multicopter. Achtung: Das Modell wird nicht immer richtig genannt. DYS XM30a haben die Firmware anderer ESCs installiert, daher stimmt der Name nicht überein, das ist aber kein Grund zur Sorge.
3: Misc
Programmierung via TX aktiv wenn Haken gesetzt.
Haken gesetzt:
Du kannst den ESC ohne Umwege über die Funke und / oder den Cleanflight
Configurator im Motor Tab einstellen. Sinnvoll für die Throttle-Kalibrierung, dazu aber weiter unten noch mehr.
Haken nicht gesetzt:
Die Funke kann keine Einstellungen des ESCs ändern. So kommt es nicht zu Fehlkalibrierung, sollte einmal der FC und / oder Funke wilde Signale weiterleiten.
4: Closed Loop Mode
Der Closed Loop ist eine Art Nachregelung. Er regelt den Copter noch feiner. Über P-Gain und I-Gain kann der Closed Loop eingestellt werden.

Der Regler versucht eine bestimmte Umdrehungszahl (je nach Gaswert) zu erreichen. Dazu muss natürlich die nötige Leistung bestimmt werden (die ansonsten direkt vom Gaswert abhängig ist) und dafür wird ein PI-Regler (P-Gain, I-Gain) genutzt.
Mögliche Einstellungen
1: HiRange (0-200k eRPM)
2: MidRange (0-100k eRPM)
3: LoRage (0-50k eRPM)
4: Off
5: Closed Loop P-Gain
Mögliche Einstellungen
1: 0.13
2: 0.17
3: 0.25
4: 0.38
5: 0.50
6: 0.75
7: 1.00
8: 1.00
9: 2.00
10: 3.00
11: 4.00
12: 6.00
13: 8.00
6: Closed Loop I-Gain
Mögliche Einstellungen
1: 0.13
2: 0.17
3: 0.25
4: 0.38
5: 0.50
6: 0.75
7: 1.00
8: 1.00
9: 2.00
10: 3.00
11: 4.00
12: 6.00
13: 8.00
7: Motor Gain
Faktor der zusätzlichen Verstärkung, die auf den Motor wirkt. Funktioniert nur wenn PWM Input aktiv ist.
Mögliche Einstellungen
1: 0.75
2: 0.88
3: 1.00
4: 1.12
5: 1.25
8: Startup Power
Dieser Wert/Faktor regelt den maximalen Strom, mit der Motor anlaufen soll. Ist der Wert zu hoch, wird viel Akku verbraucht und im schlimmsten Fall kann der Motor/ESC beschädigt werden. Bei zu wenig Strom, stottert der Motor.
9: Temperature Protection
Je nach Temperatur des Reglers, wird die Ausgangsleistung in 4 Stufen begrenzt.
– Temperatur höher als 140°C -> Motorleistung gedrosselt auf 75%
– Temperatur höher als 145°C -> Motorleistung gedrosselt auf 50%
– Temperatur höher als 150°C -> Motorleistung gedrosselt auf 25%
– Temperatur höher als 155°C -> Motorleistung gedrosselt auf 0%
Übrigens, nicht alle ESCs unterstützten dieses Feature. ESCs können bei falschen PIDs, Vibrationen oder zu viel Stromaufnahme schnell überhitzen und kaputt gehen.
10: PWM output Dither
Mit diesem Wert/Faktor kann eine Glättung auf das PWM Signal gelegt werden.
Mögliche Einstellungen
1: OFF
2: 7
3: 15
4: 31
5: 63
11: Low RPM Power Protect
Dieses Feature schützt ESC und Motor vor hohen Strömen beim Crash.
Mögliche Einstellungen: Ein Aus
Ein:
Die ESCs geben nach und lassen kein Anlaufen der Motoren zu. Sehr sinnvoll im Falle eines Crashes, im hohen Gras, oder beim vergessen des Disarming.
Aus:
Motoren und ESCs werden beim Blockieren unter Umständen überlastet. Das kann schnell in heißen Spulen, überhitzten ESCs und letzten Endes rauchender Elektronik führen. Wer seinen Copter aber nach jedem Crash schnell disarmt, sollte mit diesem Modus auch keine Probleme bekommen.
12: Motor Direction
Ändert die Drehrichtung des Motors
Mögliche Einstellungen:
normal: Der Motor dreht in die normale Drehrichtung die mit den 3 Phasen festgelegt ist.
reverse/umgekehrt: Mit dieser Einstellung änderst du die Drehrichtung. Du musst also nicht mehr die 2 Phasen eines Motors tauschen, das geht mit BLHeli per Software.
bidirectional/für 3D-Flug: Wer einen 3D-Copter für LOS-Acro- Flüge bauen möchte, muss diesen Modus anwählen. Hier bekommt der ESC mitgeteilt, dass in einem angegebenen Gasbereich der Motor rechts- und in dem anderen Gasbereich links-gedreht werden muss. Mehr zur Einstellung des 3D-Copters unten.
13: Demag Compensation
Demag compensation is a feature to protect from motor stalls caused by long winding demagnetization time after commutation. The typical
symptom is motor stop or stutter upon quick throttle increase, particularly when running at a low rpm. As described earlier, setting high
commutation timing normally helps, but at the cost of efficiency.
The demag compensation is an alternative way of combating the issue. First of all, it detects when a demag situation occurs.
– In this situation, there is no info on motor timing, and commutation proceeds blindly with a predicted timing.
– In addition to this, motor power is cut off some time before the next commutation.
A metric is calculated that indicates how severe the demag situation is. The more severe the situation, the longer power is cut off.
When demag compensation is set to off, power is never cut.
When setting it to low or high, power is cut. For a high setting, power is cut more aggressively.
Generally, a higher value of the compensation parameter gives better protection.
If demag compensation is set too high, maximum power can be somewhat reduced.
Mögliche Einstellungen: Off / Low /High
14: PWM Frequency/Damped
Gibt die PWM Geschwindigkeit des Signals an. Als zusätzliches Feature kann man, wenn der ESC es unterstützt, Damped light einschalten. Dies ist eine aktive Motorbremse, welche die Motoren sofort stoppen oder auf min_throttle Geschwindigkeit bringen wenn man Gas wegnimmt.
Mögliche Einstellungen: High / Low / Damped Light
15: Enable PWM Input
Mit dieser Einstellung kannst du die Art der Signalübertragung wechseln. Entweder PWM (on) und PPM (off) wechseln.
Mögliche Einstellung:
Off : Oneshot125/42 steht zur Verfügung.
On : für altere ESCs die kein OneShot nutzten
16: Motor Timing
Das Motortiming ist bei jedem Motor anders. Pauschal kann man sagen, je mehr Pole der Motor hat, desto höher das Timing. Ein guter Wert für alle Motoren ist „Medium“. Mit Low bekommt die nächste Phase recht früh Strom und wird gezogen. Das sorgt für etwas mehr Kraft. Ist das Setting in Richtung High eingestellt, bekommt die nächste Phase erst kurz vor Abschluss der früheren Phase Energie. Das erhöht die Drehzahl. Wenn du dir nicht sicher bist, schau in das Datenblatt des Motors, ob du eine Timing Empfehlung finden kannst.
Mögliche Einstellungen
1: Low
2: Medium Low
3: Medium
4: Medium High
5: High
17: PPM Center Throttle
Mittelstellung des Throttle Wertes, der nach der ESC Kalibrierung durch die Flugsteuerung festgelegt wird.
Ist im Prinzip nur wichtig für 3D-Quads .Ab dem angegebenen Wert ändert der ESC nämlich die Drehrichtung des Motors. Wenn du dir einen 3D-Quad bauen möchtest, musst du den Wert auf 1500 setzen – vorausgesetzt, deine Gaseingabe geht von 1000-2000.
18: Input Polarity
Mit dieser Einstellung kann man festlegen, ob bei einer positiven Flanke negativen Flanke(Signal) , Gas gegeben wird indem man den Throttle Stick hoch oder runter bewegt.
Mögliche Einstellung: Positiv/negativ
19: Beep Strength
Lautstärke der Regler beim initialisieren.
Mögliche Einstellung: 1-255 (255 entspricht 100%)
20: Beacon Strength
Lautstärke beim Lost Model Ton. Erhöht den Stromverbrauch minimal und erhitzt die Spulen, je höher der gewählte Wert. Solltest du deinen Copter erst nach 20 Minuten mit dem aktiviertem Ton finden können, kannst du dich darauf einstellen, dass die Motoren sehr heiß sind.
Mögliche Einstellung: 1-255 (255 entspricht 100%)
21: Beacon Delay
Die Zeit, nachdem der Lost Model Alarm ertönt, wenn keine Steuerbefehle an den Regler gesendet werden.
Mögliche Einstellungen
1: 1m
2: 2m
3: 5m
4: 10m
5: infinite
22: PPM Min Throttle
Niedrigster Throttle Wert, der nach der ESC Kalibrierung durch die Flugsteuerung festgelegt wird. In der Regel 1000.
23: PPM Max Throttle
Höchster Throttle Wert, der nach der ESC Kalibrierung durch die Flugsteuerung festgelegt wird. Normalerweise 2000.
Danke an folgende Mitwirkende: Mika, Jake

Hallo,
kann man BLHELI auch für RC cars/ Panzer verwenden? Ich habe es mal probiert und habe das Problem, dass man nicht so gefühlvoll um die Nullstellung herum steuern kann. Schon bei kleinen Ausschlägen geht die Drehzahl schnell hoch, bzw. ist der Ausschlag noch zu gering dann zappelt der Motor zwischen Vorwärts und Rückwärts hin und her und kommt nicht in Gange.
Welche Einstellungen müssten angepasst werden?
Danke
Hey,
damit du gefühlvoller steuern kannst würde ich die empfehlen etwas Expo in der Funke zu konfigurieren. Starte mal mit Expo 50%.
Gruß,
Phil
Hallo Philipp
Super Beitrag!
Ich hätte noch eine kleine Frage, wenn ich bei meiner Vendetta die Drehrichtung eines Motors wechseln will, wie kann ich ich in der BLHELISUITE den gewünschten ESC auswählen? Verbinde ich die Vendetta via micro USB Schnittstelle? Und kann dan in BLHELI SUITE den gewünschten ESC wählen?
Ich danke dir im Voraus für deine Rückmeldung.
Gruss Igor
Hallo Igor,
du benötigst auf jeden Fall die Betafligtht Firmware und die neuste Version der BLHeli Suite. Dann kannst du per USB die Drehrichtung ändern.
Schau mal in dem Handbuch zum PowerCube unter Firmware Updates. Da gibt es unterschiedliche Methoden um das umzusetztenö.
Beste Grüße,
Phil
Der Closed Loop Mode ist im BlHeli Manual ganz gut beschrieben: „In the closed loop mode, the throttle value while running sets the rpm target of the motor.“
Der Regler versucht also die bestimmte Umdrehungszahl (je nach Gaswert) zu erreichen. Dazu muss natürlich die nötige Leistung bestimmt werden (die ansonsten direkt vom Gaswert abhängig ist) und dafür wird ein PI-Regler genutzt. Was der Proportional/Integral Teil bewirkt sollte von den FCs bekannt sein, wenn nicht wird es hier anschaulich erklärt: https://de.wikipedia.org/wiki/Regler#Stetige_lineare_Regler
Danke für die Erklärung! =) Ich habe es im Artikel aufgenommen und dich unten auch erwähnt!
Beste Grüße,
Phil
Cool, freut mich 🙂
Ich habe den Closed Loop Modus übrigens letztens mal ausprobiert und dabei schlechte Erfahrungen gemacht. Bei LowRange ist das Teil ganz ok fliegbar, aber mit wesentlich weniger Leistung. Also MidRange eingestellt, damit war es schon sehr aggressiv beim Start und ist schon bei sehr wenig Gas gestiegen, mit etwas mehr Gas hat es sich dann aufschaukelt und dabei immer mehr Höhe gewonnen, so das es nicht mehr möglich war sauber zu landen… Das Ganze mit BlHeli 14.6, umgeflashte Plush 25A ESC, 450er Frame, 8045 Props auf 4S mit 1000kv Motoren. Erfahrungen mit anderen Setups würden mich interessieren! Man findet dazu fast nichts im Internet.
Eigentlich auch logisch, ein weiterer Regler der Überkompensieren kann. Der Text „Der Closed Loop ist eine Art Nachregelung. Er regelt den Copter noch feiner.“ ist falsch, es ist eine gänzlich andere Regelung, die das Verhalten aggressiver macht, indem es ein Drehzahlabsacken bei hoher Belastung automatisch kompensiert.
Für den Austausch fehlt einfach ein vernünftiges Forum 🙂 FB nutzt nicht jeder und taugt dafür IMHO auch überhaupt nicht.
Demag:
http://www.multi-rotor.co.uk/index.php?topic=14153.0
„Demag compensation is a feature to protect from motor stalls caused by long winding demagnetization time after commutation. The typical
symptom is motor stop or stutter upon quick throttle increase, particularly when running at a low rpm. As described earlier, setting high
commutation timing normally helps, but at the cost of efficiency.
The demag compensation is an alternative way of combating the issue. First of all, it detects when a demag situation occurs.
– In this situation, there is no info on motor timing, and commutation proceeds blindly with a predicted timing.
– In addition to this, motor power is cut off some time before the next commutation.
A metric is calculated that indicates how severe the demag situation is. The more severe the situation, the longer power is cut off.
When demag compensation is set to off, power is never cut.
When setting it to low or high, power is cut. For a high setting, power is cut more aggressively.
Generally, a higher value of the compensation parameter gives better protection.
If demag compensation is set too high, maximum power can be somewhat reduced.“
Also im Zweifel auf off, und wenn man bei geringen Drehzahlen einen stotternden Motor hat, ggf. mal Demag ausprobieren, auf Kosten der Effizienz.