
Betaflight Handbuch


Betaflight Handbuch – Vorwort
Dieses Betaflight Handbuch wurde von mir für die Betaflight Version 3.3.0 geschrieben. In neueren Versionen können Features hinzukommen oder wegfallen. Außerdem kann sich das Design und die Struktur des Betaflight Konfigurators ändern.
Alles was du hier liest und daheim ausprobierst, geschieht auf eigene Gefahr. Sichere immer deine Einstellungen, mache Backups und sei vorsichtig beim flashen.
Ich übernehme keine Haftung für eventuelle Schäden, die durch diese Anleitung/Handbuch entstehen.
Solltest du Fehler finden oder möchtest zu dem Betaflight Handbuch beitragen melde dich einfach bei mir!
Wenn du Fragen zu einzelnen Funktionen hast, nutze die Kommentarfunktion am Ende des Artikels!
Inhaltsverzeichnis
Was ist Betaflight?
Betaflight ist eine Firmware für diverse Flugsteuerungen (Flight Control – FC). Die Firmware unterstützt Quadcopter, Hexacopter, Octocopter, Tricopter und teilweise Flächenmodelle. Betaflight stammt von der 8Bit MultiWii bzw. Baseflight/Cleanflight Software ab und ist Open Source, das heißt der Quellcode ist offen und jeder kann zu dem Projekt beitragen. Bisher arbeiteten folgende Entwickler an dem Projekt.
Wenn dir die Software gefällt und du die Entwicklung unterstützen möchtest, kannst du hier spenden.
GUI Installation
Der Betaflight Configurator (GUI) kann als Standalone Software auf Windows, Mac und Linux betrieben werden. Mit dieser Software kannst du auf die Flugsteuerung zugreifen und diese konfigurieren.
Auf folgender Seite kannst du die Software herunterladen: https://github.com/betaflight/betaflight-configurator/releases

Treiber installieren
Es gibt zwei Varianten von Flugsteuerungen
Typ 1: Mit Silabs CP2103 USB Interface Chip über COM-Port
- benötigt Silabs CP210x Treiber
Typ 2: STM32 VCP USB Interface über DFU Modus
- benötigt WinUSB Treiber für den BootLoader Mode
- Zadig oder ImpulseRC DF
- .net framework v4.5
Eine ausführliche Anleitung findest du hier
Firmware flashen
Verbinde deine Flugsteuerung über ein USB-Kabel mit deinem Computer. Starte nun die GUI und klicke im linken Bereich auf „Firmware Flasher“

Schritt 1: Wähle den korrekten Port (Com-Port oder DFU) sowie Baudrate (115200) aus.
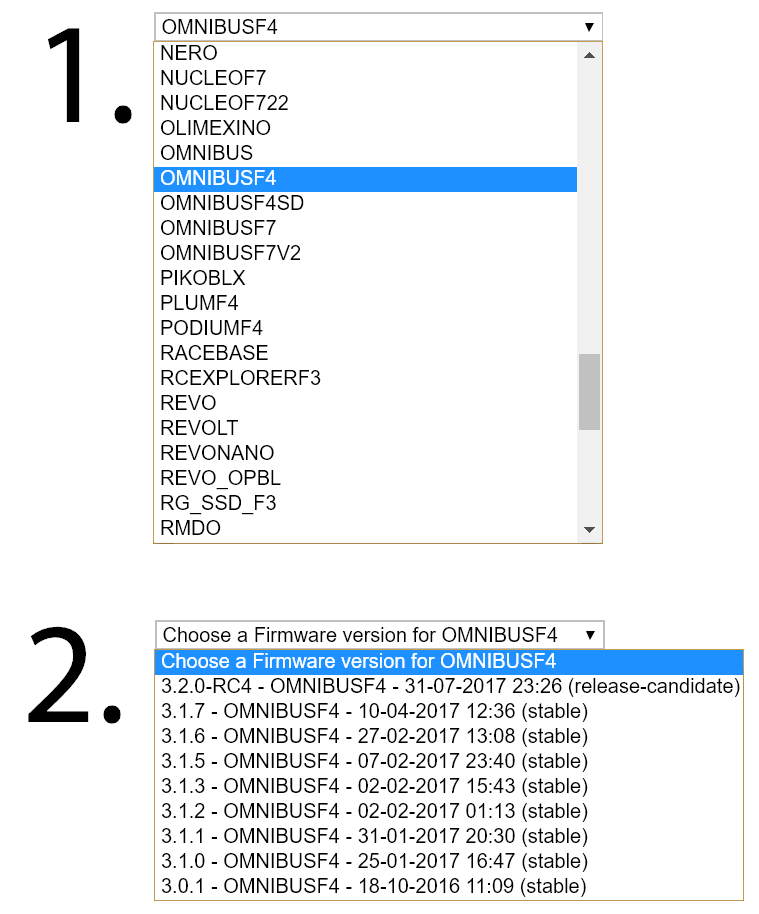
Schritt 2: Wähle die gewünschte Betaflight Version sowie Flugsteuerung aus.
Schritt 3: Unter dem Auswahlmenü sollten „No reboot squence“ sowie „Full Chip Erase“ ausgewählt sein
Schritt 4: Klicke nun auf „Load Firmware“ und es wird die ausgewählte Firmware heruntergeladen.
Schritt 5: Als letztes klickst du auf „Flash Firmware„. Achte darauf, dass du während des Vorgangs nicht das USB Kabel aus der Flugsteuerung ziehst.
Nachdem der Vorgang abgeschlossen ist, kannst du dich mit der Betaflight GUI mit der Flugsteuerung verbinden.
https://blog.seidel-philipp.de/naze32-unbrick-hard-reset-anleitung/
Menüs und Aufbau
Dies ist die Startseite des GUIs. Wenn dir Betaflight gefällt, denke über eine kleine Spende nach und klicke auf den „Donate“ Button unten rechts.
Dies unterstützt die Entwickler und sichert uns allen weitere tolle Features in den nächsten Versionen.
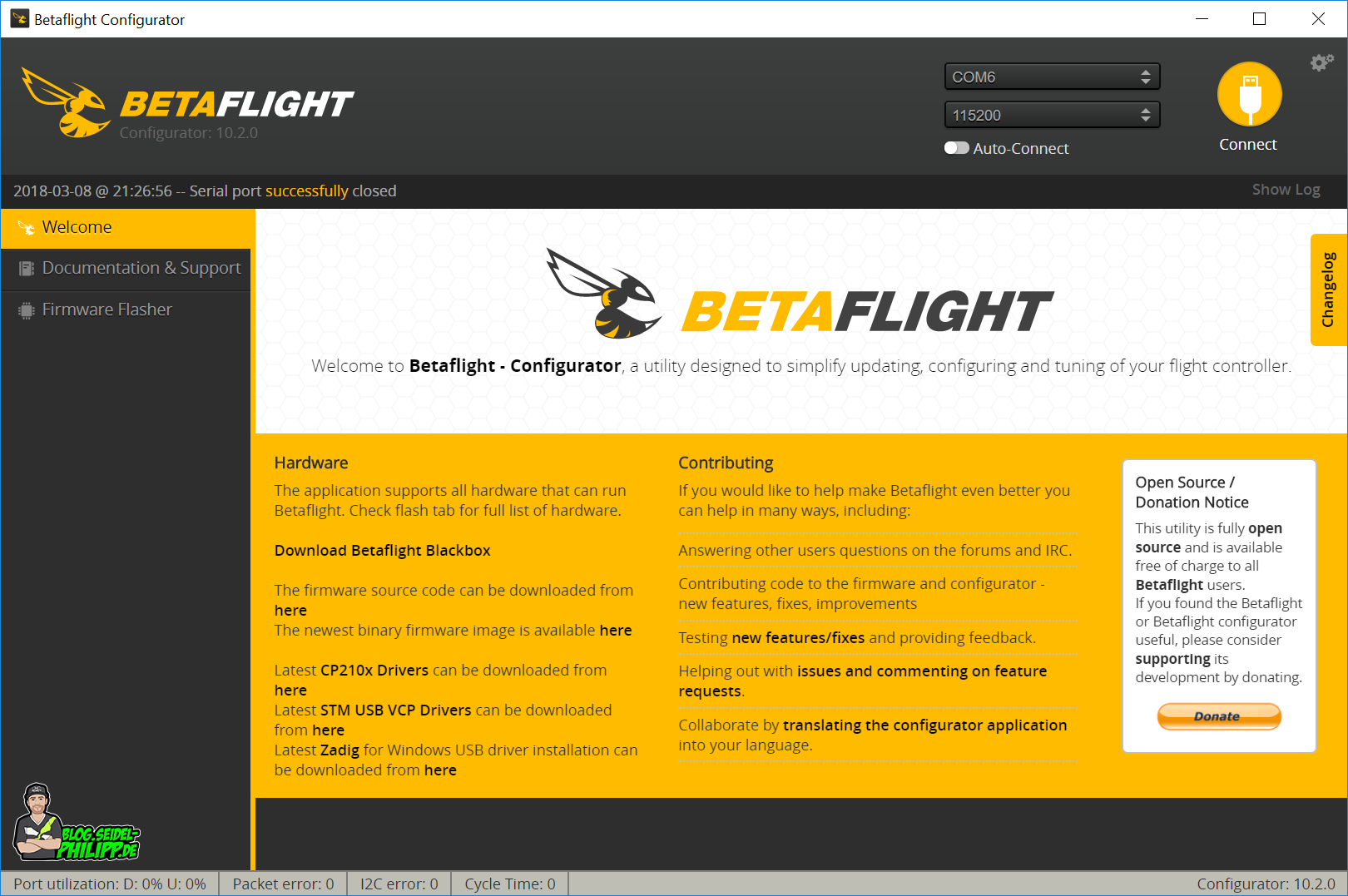
Im oberen Bereich findest du links das Betaflight Logo. Der Text unter dem Logo sagt dir, welche GUI Version und welche Firmware sowie Flugsteuerung aktuell mit der GUI verbunden ist.
In der Mitte findest du ein paar Symbole zu Sensoren. Sind diese gelb unterleuchtet, sind diese aktiv. Weiter rechts findest du die Speicherplatz-Anzeige der Blackbox sowie einen Button zum verbinden und trennen der Flugsteuerung.
Um alle Einstellungen der GUI sehen zu können, aktiviere den „Expert Mode„. Weiter unten kannst du ebenfalls den Log mit „Show/Hide Log“ anzeigen lassen.
Über das Zahnrad-Symbol gelangst du in die GUI Einstellungen. Dort empfehle ich dir die Sprache „English (en)“ auszuwählen. Die meisten Informationen sind in englischer Sprache. Wenn du deine GUI nur in deutscher Sprache verwendest, wirst du es später viel schwerer haben, wenn es mal zu Problemen kommt.
Im unteren Bereich der GUI findest du einige nützliche Informationen wie zum Beispiel die CPU Auslastung.

Setup
In diesem Tab können grundlegende Dinge wie Kalibrierung, Import und Export von Einstellungen vollzogen werden.
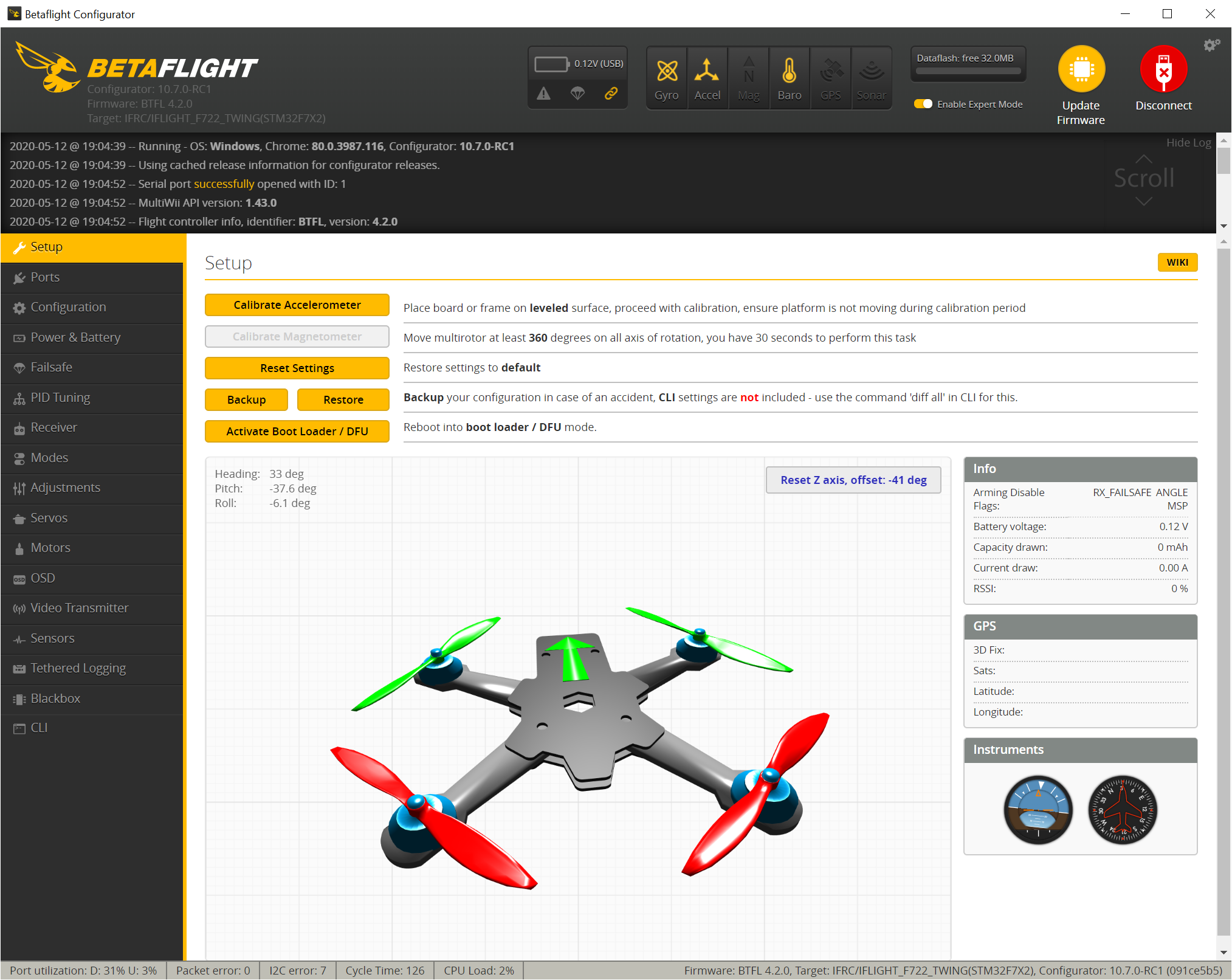
Calibrate Accelerometer (Beschleunigungssensor)
Mit dem Button „Calibrate Accelerometer“ kannst du den Beschleunigungssensor kalibrieren.
Schritt 1: platziert den Copter auf eine ebene Fläche und pass auf, dass er sich während der Kalibrierung nicht bewegt
Schritt 2: Drücke auf „Calibrate Accelerometer“ und warte bis der Vorgang abgeschlossen ist.
Du solltest folgende Meldung erhalten
2018-03-10 @ 22:51:41 -- Accelerometer calibration started 2018-03-10 @ 22:51:43 -- Accelerometer calibration finished
Magnetometer kalibrieren
Mit dem Button „Calibrate Magnetometer“ wird das Magnetometer kalibriert, falls die Flugsteuerung es unterstützt und du es verwenden möchtest. Bei dieser Kalibrierung musst du den Copter um alle 3 Achsen (Roll, Pitch, Yaw) um 360° drehen.
Schritt 1: Drücke auf „Calibrate Magnetometer„. Du hast 30 Sekunden Zeit für den nächsten Schritt.
Schritt 2: Drehe den Copter um alle 3 Achsen um mindestens 360°
Roll Pitch Yaw
Schritt 3: Warte bis der Vorgang abgeschlossen ist.
2018-03-10 @ 22:51:41 -- Magnetometer calibration started 2018-03-10 @ 22:51:43 -- Magnetometer calibration finished
Werkszustand – Reset Settings
Möchte man alle Einstellungen auf Werkseinstellungen zurück setzen, drückt man diesen Button. Achtung: Alle Daten gehen verloren.
Backup der Einstellungen
Mit einem Klick auf „Backup“ können die Einstellungen in einer Textdatei (.txt) gespeichert werden. Die CLI Einstellungen werden nicht gespeichert. Deswegen ist es wichtig auch diese zu sichern.
CLI-Einstellungen sichern
Klickt auf den Tab „CLI“ und gebt folgenden Befehl ein:
dump
Nun werden alle CLI Variablen untereinander geschrieben. Diese solltest du in einem weiteren Textdokument abspeichern.
Backup wiederherstellen – Restore
Wenn du die Einstellungen aus einem Backup wiederherstellen möchtest, drücke „Restore„. Wähle nun die Text-Datei aus.
Um das CLI-Backup wiederherzustellen reicht es völlig aus den Inhalt der CLI-Backup Textdatei in dem Tab „CLI“ einzugeben und mit Enter zu bestätigen.
Z-Achse zurücksetzten – Reset Z axis
Wenn du deinen Copter in Flugrichtung vor dir auf dem Schreibtisch stehen hast und der Copter in der GUI aber zum Beispiel nach links zeigt, kannst du mit drücken auf den „Reset Z axis“ Button den Copter wieder gerade ausrichten.
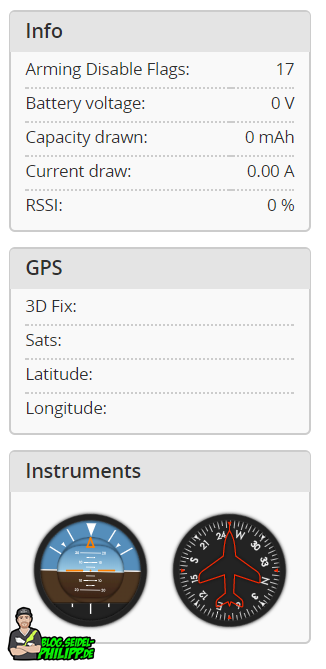
In der Info Box findest du weitere Informationen zu Spannung, GPS und anderen Werten.
Ports
Hier lassen sich verschiedene Einstellungen zur Konnektivität vornehmen. Unter anderem lassen sich hier Empfänger, Telemetrie oder andere Geräte vorkonfigurieren.
Die Port sind sogenannte UARTS (Universal asynchronous receiver-transmitter). Sie werden in der Regel mit TX und RX bezeichnet und sollten idealerweise auf der Flugsteuerung markiert sein.
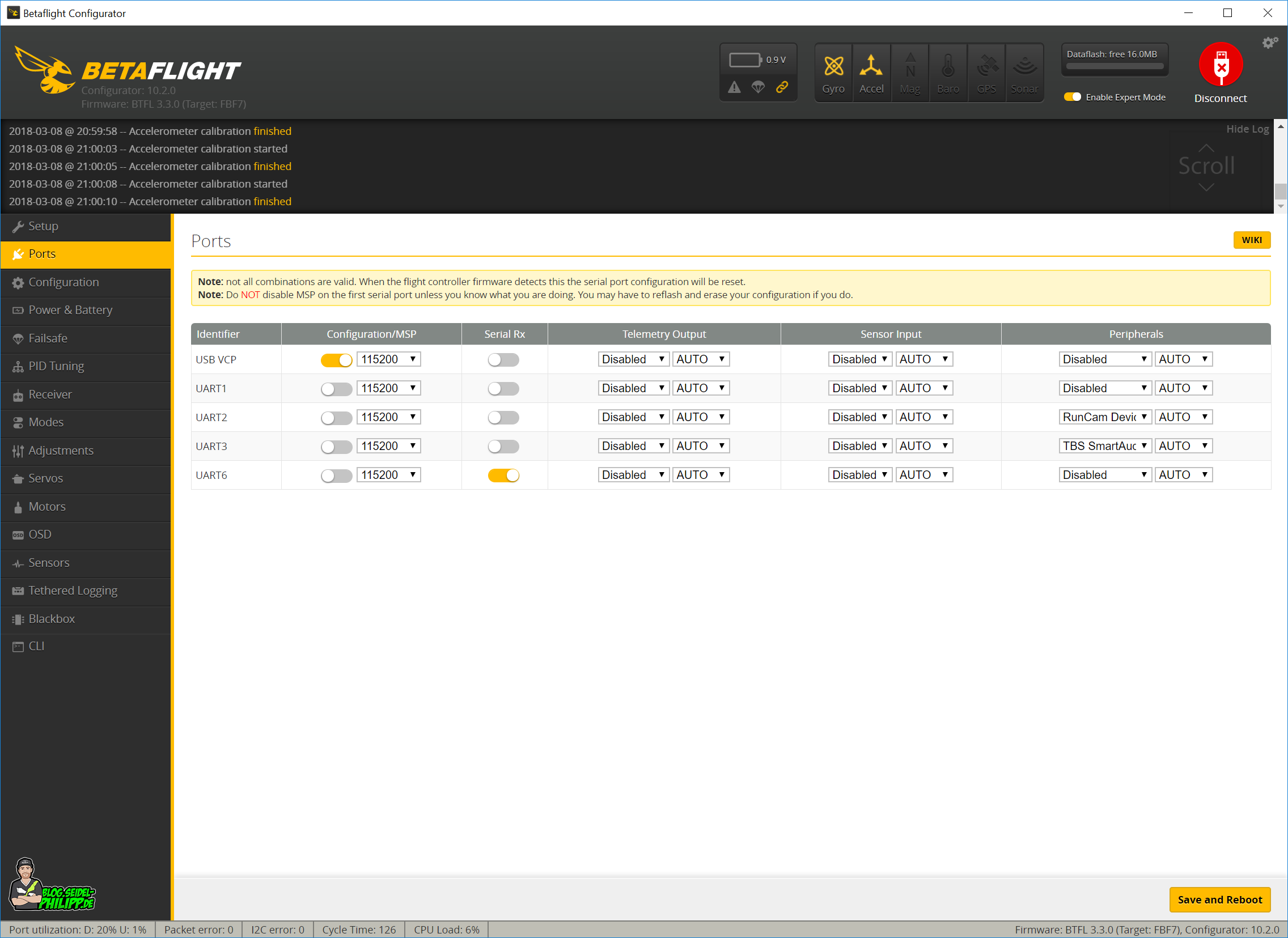
Identifier
Sagt aus um welchen UART Port es sich handelt
Configuration/MSP
Diese Option sollte nur 1x ausgewählt sein. Dabei handelt es sich um den USB Anschluss. Normalerweise ist dieser auf dem USB VCP aktiviert. Wenn du ihn aus versehen deaktivierst, kannst nicht mehr auf deine Flugsteuerung zugreifen und musst unter Umständen mit einem Totalverlust deiner Daten rechnen und die Firmware neu flashen.
Serial RX
Serial RX aktiviert die Kommunikation eines an diesem UART angeschlossenen Empfängers wie zum Beispiel den FrSky R-XSR. Hier sollte ebenfalls nur ein UART als Serial RX aktiviert werden.
Telemetry Output
Mit dieser Option können an dem betroffenen UART Telemetrie Daten ausgegeben werden.
Sensor Input
Mit dieser Option können an dem betroffenen UART GPS oder ESC Sensoren angeschlossen werden.
Peripherals
Mit dieser Option können an dem betroffenen UART diverse Serielle Geräte angeschlossen werden. Zum Beispiel können darüber RunCam FPV Kameras oder Video Sender angesprochen werden.
Configuration
In diesem Tab finden sich die wichtigsten und grundlegenden Einstellungen wieder.
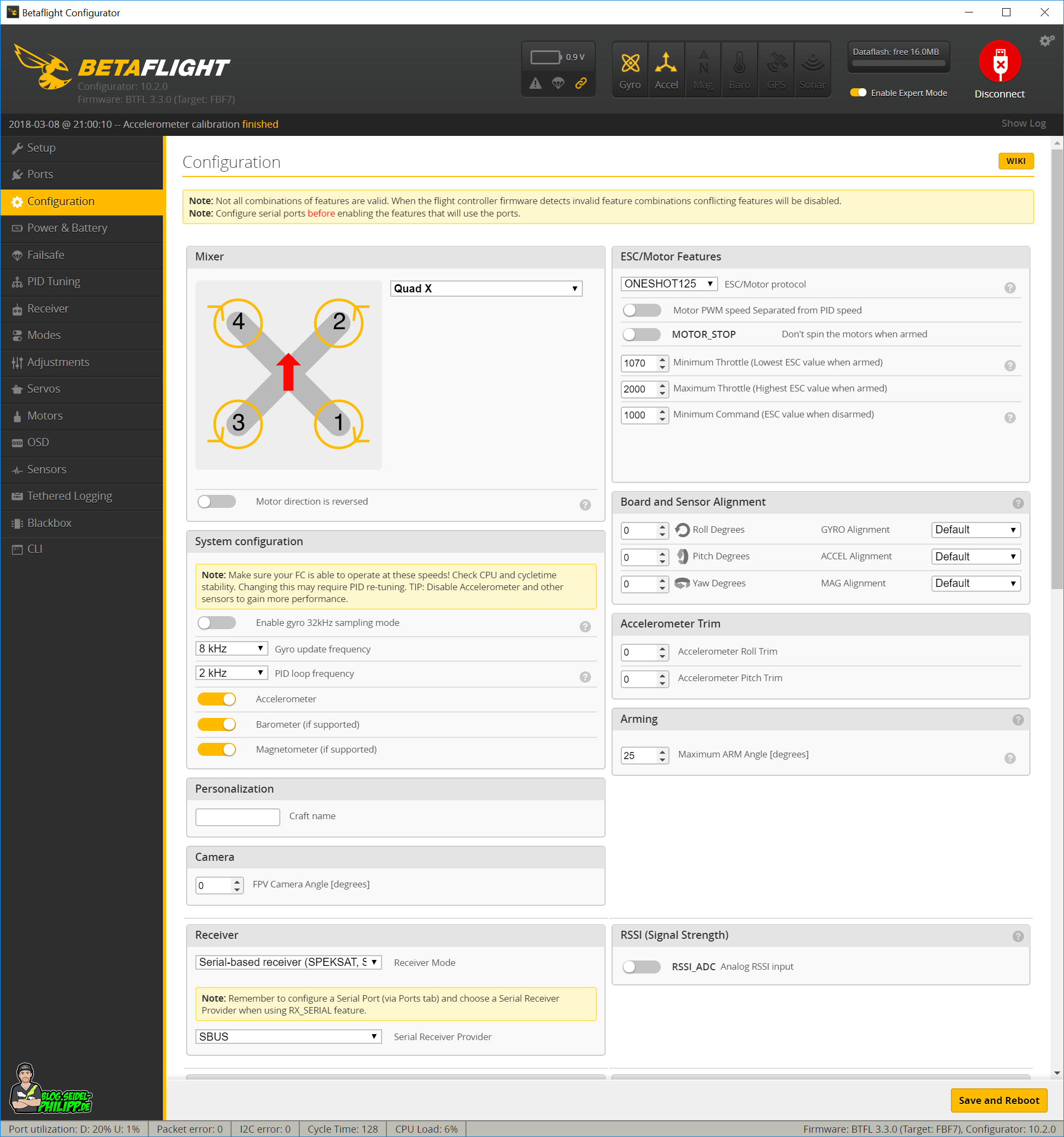
Mixer
Hier wird per Dropdownmenü der Typ des Flugmodells ausgewählt. In unserem Fall betreiben wir einen regulären Quadrocopter und wählen daher das Modell „Quad X„. Die durchnummerierten Motoren sollten in dieser Reihenfolge an die Motorenausgänge der Flugsteuerung angeschlossen werden. Die Drehrichtung der Motoren ist hier auch dargestellt. Möchtest du die Drehrichtung aller Motoren ändern, kannst du dies mit dem Schalter „Motor direction is reversed“ tun.
ESC/Motor Features
- ESC/Motor protocol: In diesem Dropdown Menü stellst du das ESC Protokoll deiner ESCs ein. Wenn deine ESCs zum Beispiel Dshot unterstützen, musst du dies hier auswählen
- Motor PWM speed Separated from PID speed: Solltest du dein PWM Signal anders als dein PID-Speed betreiben wollen, kannst du hier die Motor PWM Frequenz einstellen
- MOTOR_STOP: Wenn aktiviert, drehen sich die Motoren nicht, wenn der Copter gearmed ist
- Minimum Throttle (Lowest ESC value when armed): Minimaler Gas-Wert. Dies ist der niedrigste Wert um die Motoren zu starten. Wenn „MOTOR_STOP“ aktiviert ist drehen sich die Motoren nach dem scharfstellen auf „MINTHROTTLE“ Geschwindigkeit. Den Wert findet ihr heraus, wenn ihr im Tab „Motors“ die Motoren (natürlich ohne Propeller) mit dem Schieberegler startet.
- Maximum Throttle (Highest ESC value when armed): Maximaler Gas-Wert
- Minimum Command (ESC value when disarmed): Gas-Wert, wenn Copter disarmed ist
System configuration
In diesem Fenster können Geschwindigkeiten für Gyro und PID-Loop festgelegt werden. Außerdem können verschiedenen Sensoren wie Accelerometer, Barometer oder Magnetometer aktiviert werden.
Board and Sensor Alignment
Dieser Punkt ist für alle diejenigen wichtig, die die Flugsteuerung auf dem Copter drehen oder neigen möchten. Normalerweise muss die Flugsteuerung immer mit dem Pfeil in Flugrichtung eingebaut werden. Damit ist der USB Port aber manchmal schwer zu erreichen.
Wenn wir die Flugsteuerung auf dem Copter drehen, geben wir also die exakte Gradzahl der Drehung bzw Neigung an.
Accelerometer Trim
Hier kann der Beschleunigungssensor über ROLL und PITCH getrimmt werden.
Personalization
In diesem Feld kannst du deinem Copter einen Namen geben. Wenn deine Flugsteuerung ein OSD hat, wird dort zum Beispiel dieser Name angezeigt.
Arming
Wenn der Beschleunigungssensor (Accelerometer) aktiviert ist, kann man hier eine Gradzahl eingeben bis der der Copter zu armen ist. Steht der Copter zu schief, ist ein scharf schalten der Motoren nicht möglich.
Camera
Trage hier deinen Winkel der FPV Kamera ein, wenn du einen speziellen Modus fliegen möchtest, der diesen Winkel bei Drehungen kompensiert. Trage hier bitte nur etwas ein, wenn du weißt was du tust.
Receiver
In diesem Tab legst du fest, was für eine Art Empfänger verwendet wird. Beachte bitte, dass vorher im Port-Tab der Empfänger dem korrekten UART zugewiesen ist.
RSSI (Signal Strength)
Wenn deine Flugsteuerung über einen RSSI Eingang verfügt, kannst du hier ein analoges Signal anschließen. Somit weißt du immer wie gut/schlecht deine Verbindung zum Copter ist.
Other Features
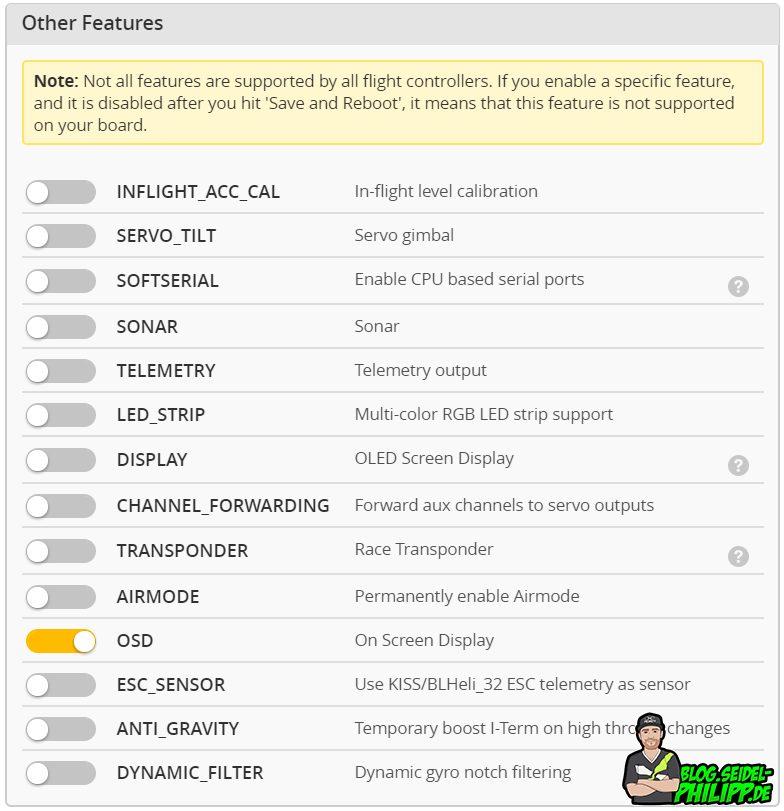
INFLIGHT_ACC_CAL: Ermöglicht die ACC Kalibrierung während des Fluges (bitte nicht verwenden, sehr altes Feature)
SERVO_TILT: Dient zur Ansteuerung eines Servos. Zum Beispiel für ein Gimbal
SOFTSERIAL: Aktiviert CPU emulierte Serial Ports (Tutorial)
SONAR : Möchte man ein Sonar zum messen der Flughöhe haben muss diese Option aktiviert werdens
TELEMETRY: Gibt Telemetrie Daten aus
LED_STRIP: Steuert einen oder mehrere LED Stripes an (wird im LED-Tab konfiguriert)
DISPLAY OLED: OLED Display Ansteuerung
CHANNEL_FORWARDING: Mit dieser Option kann man Kanäle zur Steuerung von Servos direkt weiterleiten
TRANSPONDER: Wenn du einen Race-Transpoder verwenden möchtest, kannst du ihn hier aktivieren
AIRMODE: mit Airmode kann man einen Copter im freien Fall auch ohne Gas steuern
OSD: Wenn die Flugsteuerung ein OSD hat, kann man es hier aktivieren (z.B. Matek F405)
ESC_SENSOR: Für Motor-Regler, die Telemetrie-Daten liefern wie Umdrehung oder Stromverbrauch (z.B. Holybro Tekko32 35A BLHeli_32)
ANTI_GRAVITY: Kurzzeitiger „Boost“ vom I-Term wenn man schnelle Gas-Änderungen macht. (Wird aktiviert, wenn der Copter bei Vollgas zu Seite zieht)
DYNAMIC_FILTER: Schaltet den die dynamischen Notch-Filter ein
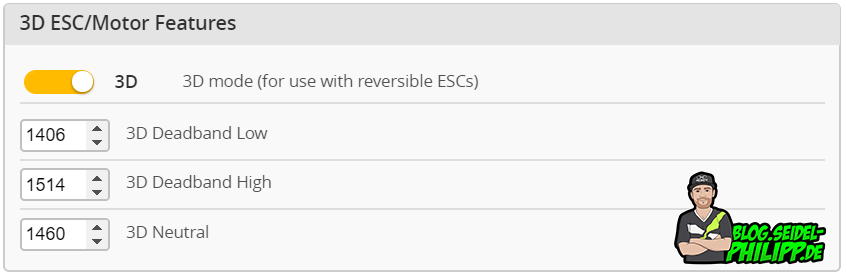
3D ESC/Motor Features
Wenn du 3D fliegen möchtest kannst du das Feature hier aktivieren und konfigurieren, wenn deine ESCs dies unterstützen.
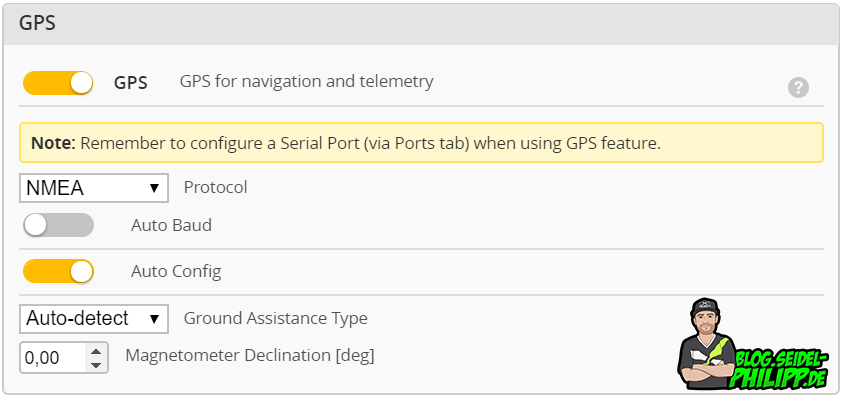
GPS
Wenn du ein GPS angeschlossen hast, kannst du es hier aktivieren und einstellen. Wähle dazu das korrekte Protokoll (NEMA oder UBLOX) aus.
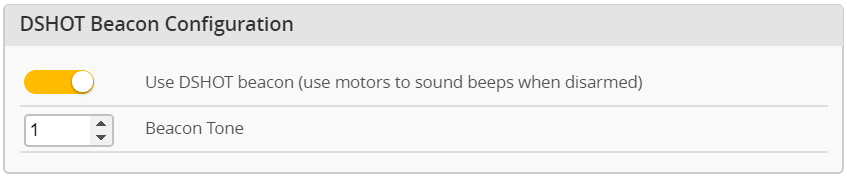
DSHOT Beacon Configuration
Wenn du keinen Pieper eingebaut hast, kannst du die Pieptöne auch mit einen DShot fähigen ESC über die Motoren ausgeben lassen.
Beeper Configuration
In diesem Menü kannst du festlegen, zu welchen „Events“ der Pieper auslösen soll.
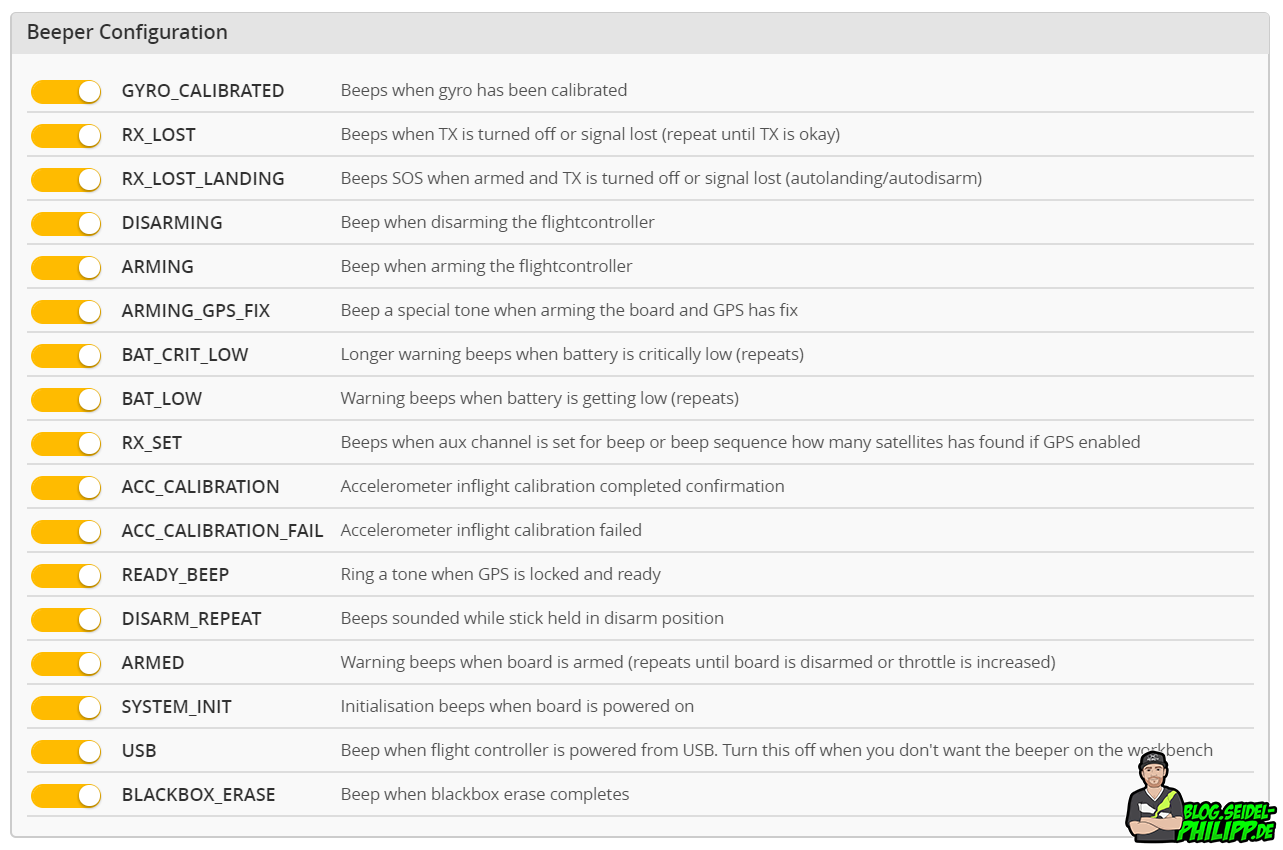
- GYRO_CALIBRATED Piepse wenn Gyro kalibriert wurde
- RX_LOST Piepse wenn die Verbindung der Fernsteuerung abgerissen ist (bis zur Wiederherstellung der Verbindung)
- RX_LOST_LANDING Piepse SOS wenn gearmt ist aber das Signal zur Fernsteuerung fehlt (Automatische Landing / automatisches disarmen)
- DISARMING Piepse beim Disarmen des FCs
- ARMING Piepse beim Armen
- ARMING_GPS_FIX Piepse einen besoderen Ton falls gearmt ist und eine GPS Verbindung besteht
- BAT_CRIT_LOW Piepse länger falls die Batteriespannungen einen kritischen Wert erreicht
- BAT_LOW Piepse falls die Batteriespannung gering ist
- RX_SET Piepsen wenn Aux Kanal dafür gesetzt wurde oder piepst eine Sequenz bei aktiviertem GPS je nachdem wie viele Satelliten gefunden wurden
- ACC_CALIBRATION Kalibrierung des Beschleunigungssensors im Flug erfolgreich
- ACC_CALIBRATION_FAIL Kalibrierung des Beschleunigungssensors im Flug fehlgeschlagen
- READY_BEEP Spiele einen Ton wenn das GPS eine Position hat und bereit ist
- DISARM_REPEAT Piepst solange der Stick in disarm Position gehalten wird
- ARMED Warnpiepsen wenn das Board gearmt wurde (bis zum disarm oder Gas geben)
- SYSTEM_INIT Einschaltpiepsen wenn das Board hochgefahren wurde
- USB Piepsen wenn Flugcontroller über USB angeschlossen ist. Abschalten um am Schreibtisch seine Ruhe zu haben 🙂
- BLACKBOX_ERASE Piepsen wen Blackbox Log löschen erfolgreich
Power & Battery
Einstellungen zu Batterie sowie Strom-Sensor werden in diesem Menü eingestellt.
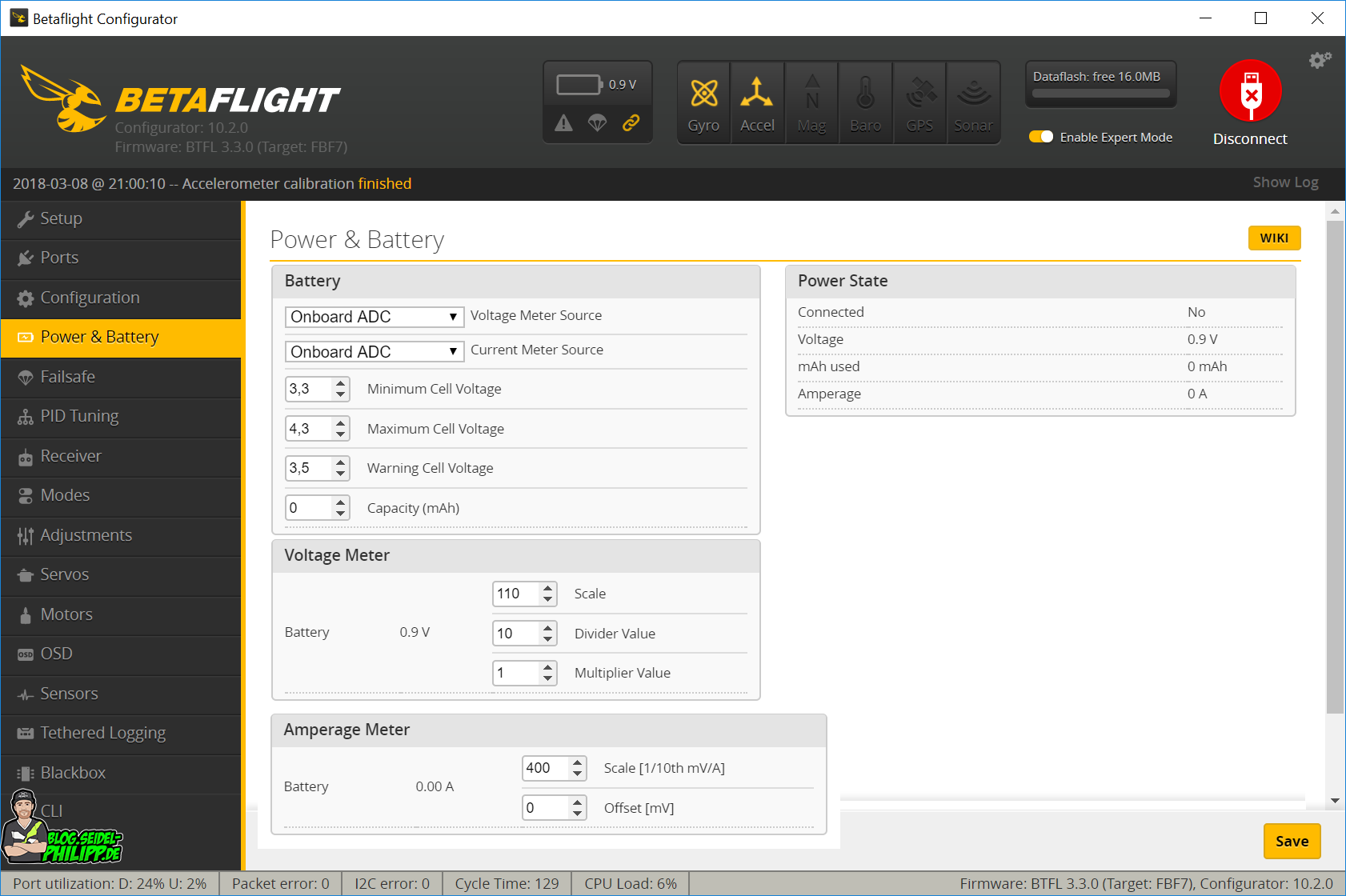
Battery
Im diesem Fenster wird festgelegt, über welche Methode die Flugsteuerung die Spannung und den Strom messen soll. Dies kann man entweder über Onboard ADC oder externe Sensoren gemacht werden. Darüber hinaus kann man hier die gewünschten maximal und minimal Spannungen einstellen, sowie ab wann die Spannungswarnung kommen soll. Wenn du auch Kapazitätswarnungen bekommen möchtest, kannst du die Kapazität deines Akkus unter „Capacity) in mAh eintragen.
Power State
Im Bereich Power Stade siehst du aktuelle Informationen wie Spannung, Verbrauch und aktuellen Stromverbrauch wenn ein Akku angeschlossen ist.
Voltage Meter (Spannung)ku
Die meisten Flugsteuerungen können die Akku Spannung messen. Diese wird meistens am VBAT Anschluss angeschlossen. Wenn die Flugsteuerung ein PDB hat, gibt es dieses Pad meistens nicht, da die Spannung ja schon angeschlossen ist. „Scale“ ist ein Faktor zum feinjustieren der Spannung. Sollte eure Flugsteuerung einen anderen Spannungsteiler verbaut haben, müsst ihr den Divider/Multiplier dementsprechend einstellen.
Amperage Meter (Strom)
Wie auch bei der Spannung wird das Amper-Meter über den Scale-Wert justiert. Ein Video dazu findest du hier: the safest way to calibrate your Betaflight current sensor
Failsafe
Diese Tab lässt dich den Fail-Safe einstellen. Bevor du das erste Mal die Propeller auf einen neuen Copter schraubst, prüfe immer ob der Failsafe funktioniert!
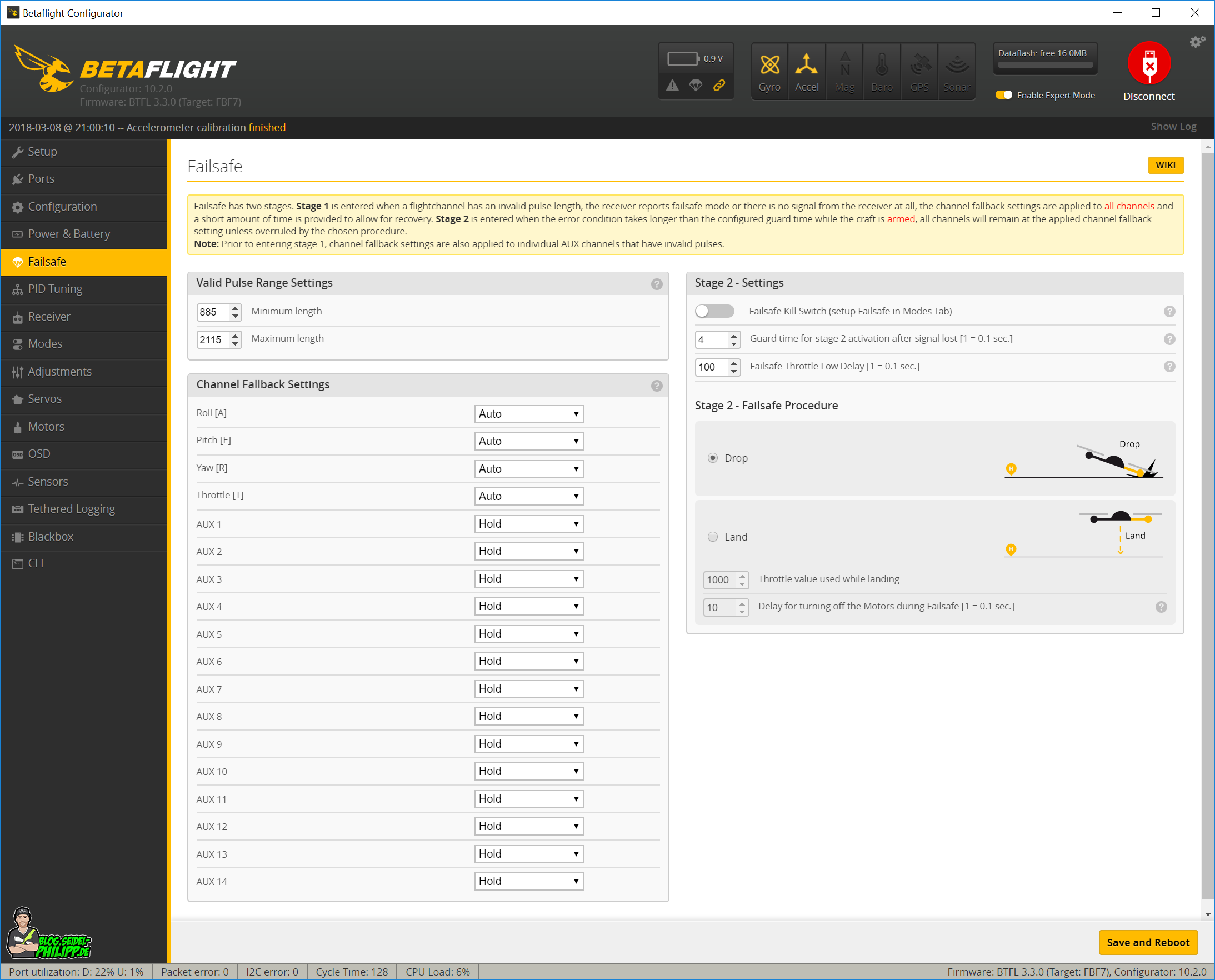
Valid Pulse Range Settings
Failsafe Stufe 1 wird aktiviert, wenn:
- ein Kanal eine ungültige Impulslänge hat oder
- der Empfänger einen Failsafe-Modus meldet oder
- kein Signal vom Empfänger kommt
Die Fallback-Einstellungen werden dann auf alle Kanäle angewendet und es wird eine kurze Zeit zur Verfügung gewartet, falls die Verbindung doch wieder aufgebaut wurde.
Channel Fallback Settings
Wenn Stufe 1 des Failsafes aktiviert wird, werden alle Kanäle auf die unten stehenden Werte gesetzt.
Stage 2 – Settings
Sollte der Failsafe länger als die eingetragenen Milli-Sekunden unter „Guard Time“ andauern, wird automatisch Stufe 2 aktiviert.
Stage 2 – Failsafe Procedure
Drop: Schaltet die Motoren ab und lässt den Copter abstürzen.
Land: Aktiviert den Auto-Level-Modus und versucht den Copter zu laden.
Wenn „Land“ aktiviert ist, muss ein korrekter Gas-Wert (Throttle value) angegeben werden, welches den Copter ca 1 meter pro Sekunde sinken lässt. Dieser Wert ist bei jedem Copter anders und muss getestet werden.
Failsafe testen
- alle Propeller vom Copter entfernen
- Copter armen und etwas Gas geben, sodass sich die Motoren drehen
- Schalte die Funke aus
- Nach ein paar Millisekunden sollten die Motoren ausschalten.
- Stelle die Funke erneut ein und arme erneut. Ohne, dass der Gas-Stick auf 0 steht sollten die Motoren nicht laufen
- Stelle das Gas auf 0 und arme erneut. Der Copter sollte sich nun wieder normal steuern lassen.
- Füge den selben Test erneut durch, aber anstelle die Funke auszuschalten, entferne die Stromversorgung vom Empfänger. Das Verhalten sollte identisch sein wie bei dem ersten Test.
PID Tuning
In diesem Tab werden die PIDs, Filter, Rates und vieles mehr konfiguriert.
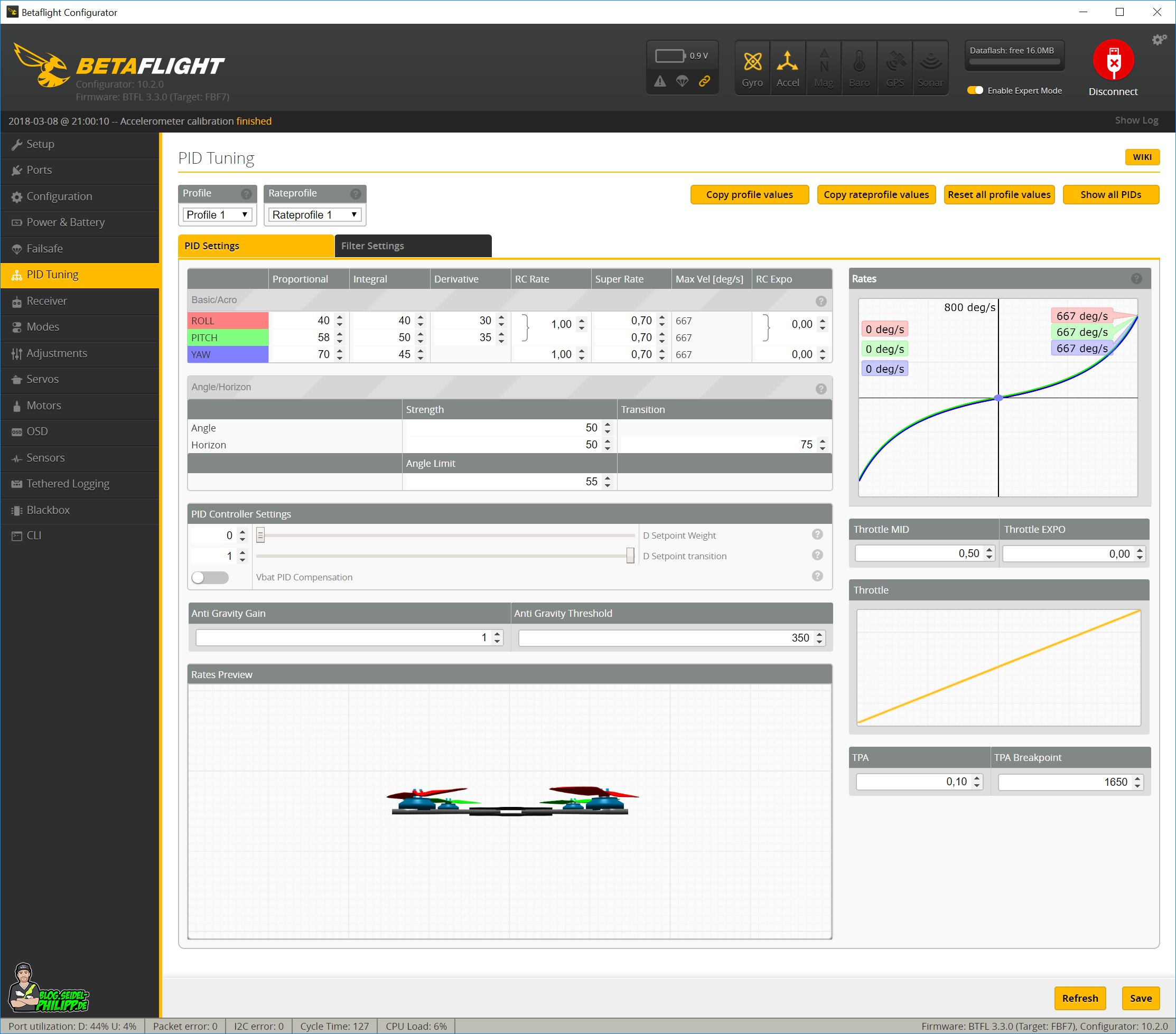
PID Settings
In diesem Fenster kannst du für ROLL, PITCH und YAW die PIDs einstellen.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PID Controller Settings
Für erweitertes Tuning kannst du hier am D Setpoint Einstellungen vornehmen.
Anti Gravity Gain / Threshold
Die Anti-Gravity Einstellungen werden hier vorgenommen. Simon hat ein schönes Video dazu gemacht:
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Filter
In dem Tab „Filter Settings“ werden die Filter ausgewählt und konfiguriert. Ebenso werden hier die Notch-Filter 1 und 2 konfiguriert.
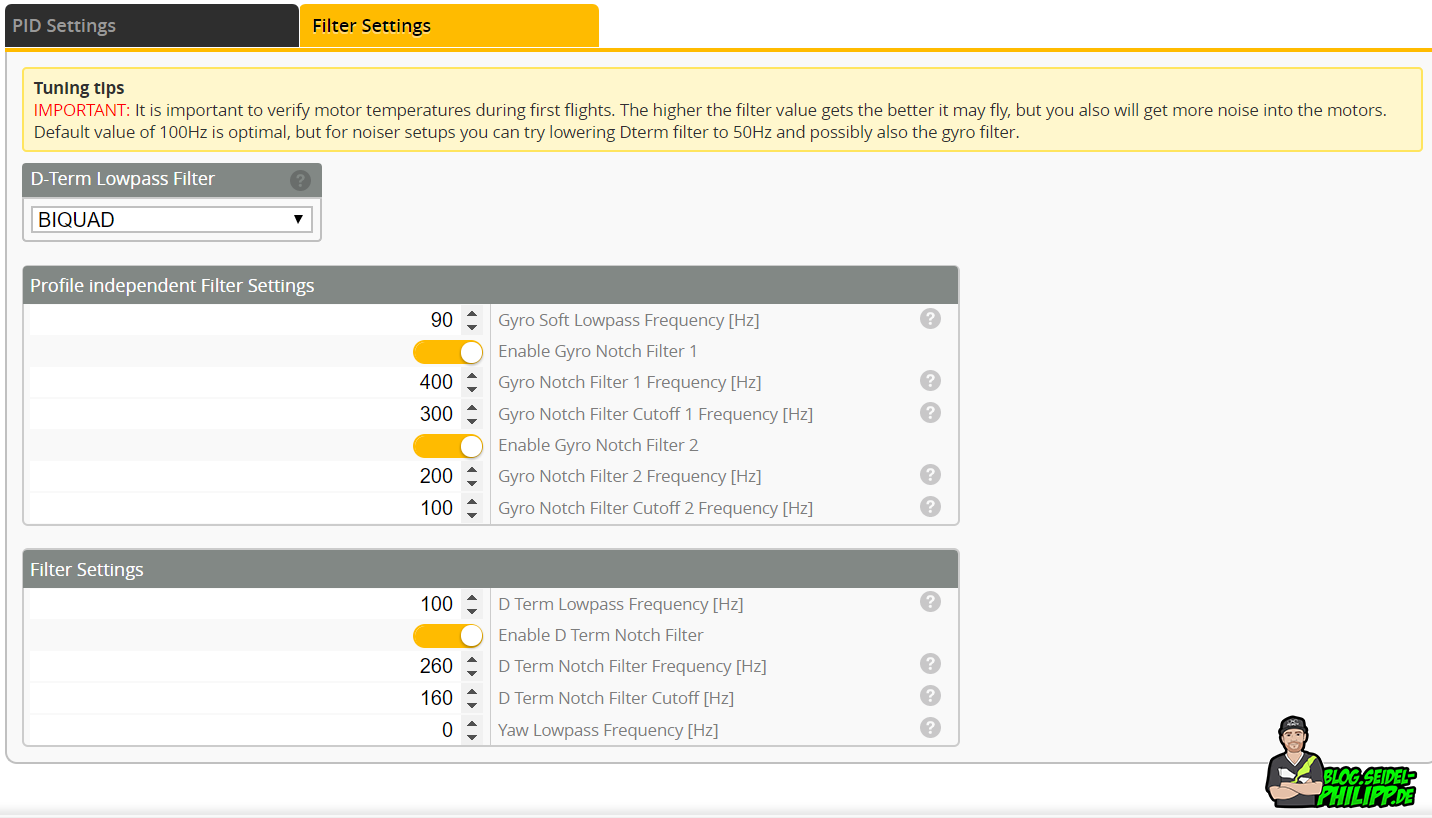
Notch Filter
Die beiden Notch-Filter eignen sich hervorragend zur Unterdrückung von „Rauschen/Noise“ in einem sehr spezifischen Frequenzband. Notch-Filter sind in der Regel effektiver zur Reduzierung des Motorrauschens als Low Pass Filter.
Low Pass Filter
Der Zweck von Low Pass Filtern ist es, hochfrequente Signale zu reduzieren bzw. zu dämpfen, während niederfrequente Signale ignoriert werden.
Rates
Ebenso kannst du hier auch die Rates einstellen. Wie sich die Rates auf deinen Copter auswirken kannst du entweder im Diagramm rechts erkennen oder im Fenster „Rates Preview“ weiter unten auf der Seite. Mithilfe der Rates kannst du deinen Copter schneller/mehr oder langsamer/weniger auf deine Eingaben reagieren lassen. Hohe Rates bedeuten zum Beispiel, dass du mehr Flips/Rolls pro Sekunde machen kannst als mit niedrigeren. Möchte man smooth fliegen, zum Beispiel für LongRange oder langsame Kamerabewegungen, stellt man niedrige Rates ein. Ein Online-Tool zur Simulation findest du hier.
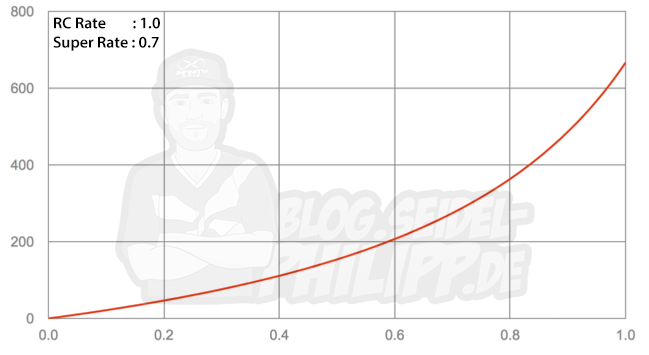
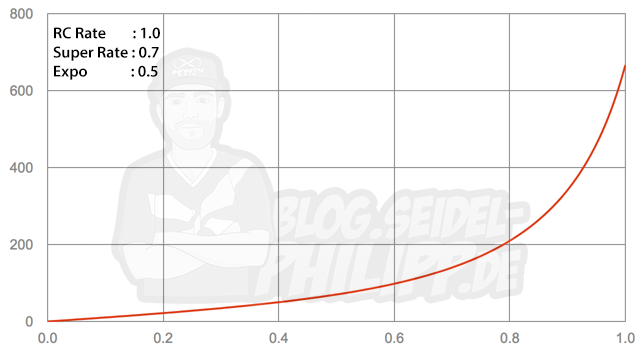
RC Rate
Die RC Rate Einstellung beeinflusst die Geschwindigkeit mit der sich dein Copter auf einer bestimmten Achse dreht. Roll und Pitch Achse haben einen gemeinsamen Wert. Für Yaw kann man einen eigenen Wert festlegen. Je höher der Wert, desto schneller und agressiver reagiert der Copter.

die vertikale Achse beschreibt die Umdrehung des Copters in °/s (Grad pro Sekunde)
die horizontale Achse stellt die Stickbewegung von Mitte (1500) bis Ende (2000) dar
Super Rate
Der Super Rate Wert verschiebt die Kurve um die Stick-Mitte. Je höher die Super Rate ist desto „smoother“ lässt sich der Copter um mittleren Stick Bereich steuern (normale Flugmanöver). Wenn man „höhere“ Stickbewegungen macht wird der Copter wesentlich agressiver und man hat bei vollem Stick-Ausschlag eine deutlich höhere Umdrehungsrate.
Dieser Wert muss zusammen mit RC Expo und RC Rate angepasst werden um die gewünschte Kurve zu erhalten. Mittlerweile bieten Betaflight und KISS eine grafische Oberfläche, die das Stickverhalten an einer Kurve und einem sich drehenden Copter sehr gut simulieren.
RC Expo
RC Expo reduziert die Empfindlichkeit in der Nähe der Mitte der Stickbewegung. Die maximale Umdrehungszahl wird aber beibehalten.
Throttle EXPO & Throttle MID
Throttle Expo flacht die Gas-Kurve etwas ab, sodass man feinere Gasänderungen vornehmen kann. Es wird nicht viel verwendet, aber ein Einsatzzweck könnte sein, bei Long-Range Flügen die Höhe genauer halten zu können, wenn man sehr tief über dem Boden fliegen möchte.
Der Throttle MID Wert legt fest, wo du die Expo-Kurve in der Gaskurve haben (starten) möchtest.
TPA & TPA Breakpoint
TPA dämpft die PIDs um einen bestimmten Prozentwert. Wird oft verwendet wen man bei Vollgas Vibrationen/Oszillationen oder zu hohe PIDs hat. In diesem Fall muss man nicht zwingend die PIDs ändern, sondern regelt es über den TPA Wert.
TPA Breakpoint, ist der Gaswert ab dem die Dämpfung der PIDs anfangen soll. Falls du Vibrationen oder Oszillationen bei hohen Gaswerten hast, setze den Breakpoint etwas darunter und teste dann verschiedenen Prozentwerte aus um die Vibrationen bzw. Oszillationen zu vermeiden.

Receiver
In diesem Tab werden Grundlegende Einstellungen zu dem Empfänger vorgenommen.
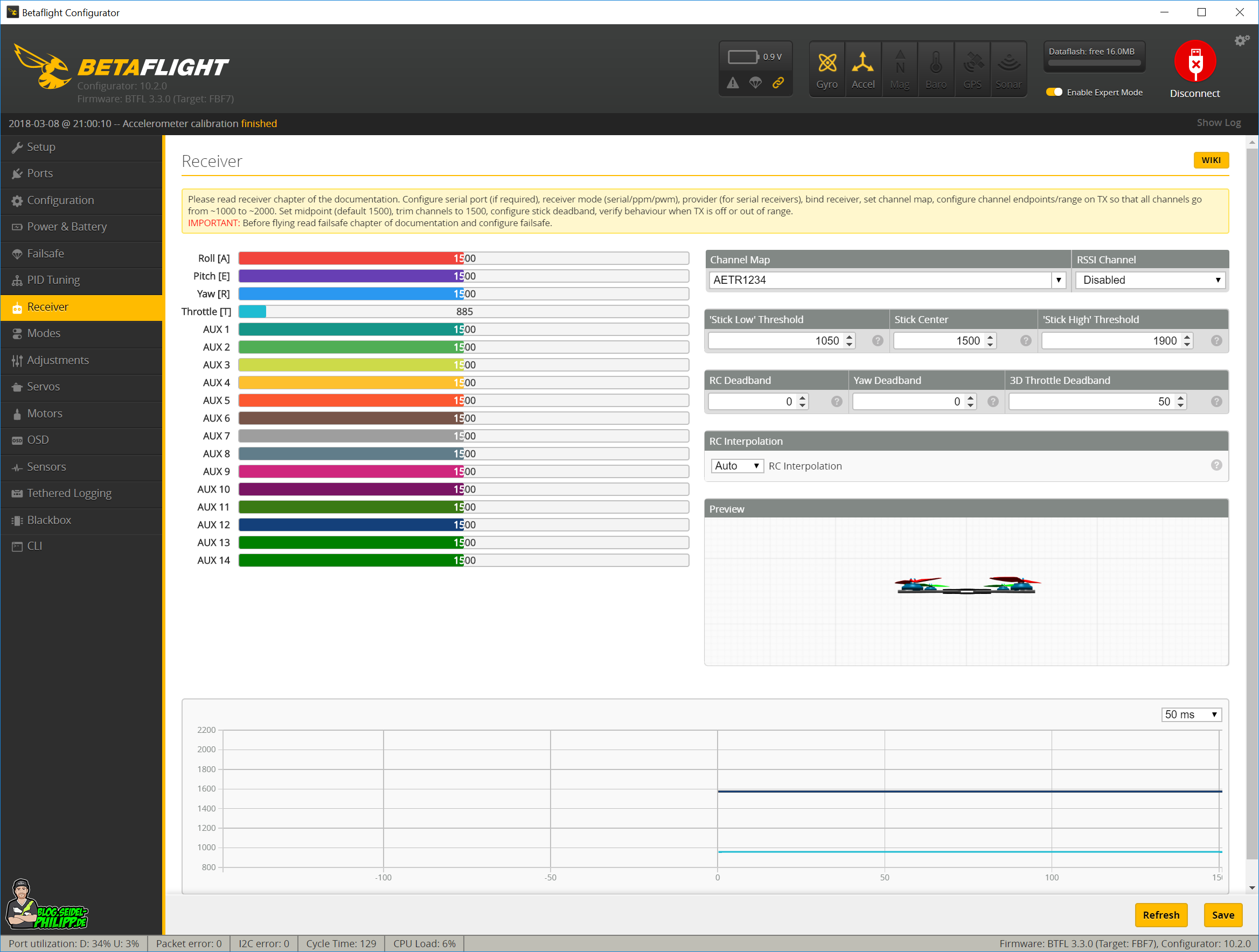
Auf der linken Seite werden alle Stickeingaben graphisch dargestellt. Dieser Tab kann dazu verwendet werden die Kanäle per Subtrim (an der Fernsteuerung) genau auf 1000, 1500 sowie 2000 einzustellen. Dies ist wichtig und sollte bei jedem Empfänger/Modell einmalig gemacht werden um langsames driften zu vermeiden.
Channel Map
„AETR1234“ legt die Kanalreihenfolge fest. Jeder Sender (Fernsteuerung) verfügt über eine bestimmte Anzahl an Kanälen die gesendet werden. Es ist wichtig, dass die Reihenfolge der Kanäle die gesendet werden auch zu den Funktionen/Reihenfolge des Empfängers/Flugsteuerung passen.
Kanal 1 – Aileron (Roll-Achse)
Kanal 2 – Elevator (Pitch-Achse)
Kanal 3 – Throttle (Gas)
Kanal 4 – Rudder (YAW-Achse)
Kanal 5 – AUX 1
Kanal 6 – AUX 2
Kanal 7 – AUX 3
Kanal 8 – AUX 4
Beispiel: bei „AETR1234“ wird der Gas-Stick der Fernsteuerung auf Kanal 3 (dritter Buchstabe) gelegt. Die Flugsteureung interpretiert nun alle Signale die auf Kanal 3 ankommen als Gas-Wert. Soweit alles korrekt. Sollte die Funke aber den Gas-Wert auf Kanal 4 senden, denkt die FC, dass es sich um die YAW Achse handelt und der Copter würde unfliegbar werden. Wenn eure Kanäle also nicht zu den Sticks passen, hat man hat also zwei Möglichkeiten, die Kanalreihenfolge umzustellen. Entweder in der Fernsteuerung oder der Flugsteuerung.
RSSI Channel
Wenn dein Empfänger die Funktion hat den RSSI Wert deiner Funke wieder an den Copter zu senden, legt man diesen in der Regel auf einen freien Kanal. Dieser Kanal wird hier ausgewählt.
Stick „Low“ Threshold
…
Stick Center
…
Stick „High“ Threshold
…
RC Deadband
…
YAW Deadband
…
3D Throttle Deadband
…
RC Interpolation
…
Modes
Dieser Tab werden die Flugmodi verwaltet und konfiguriert.
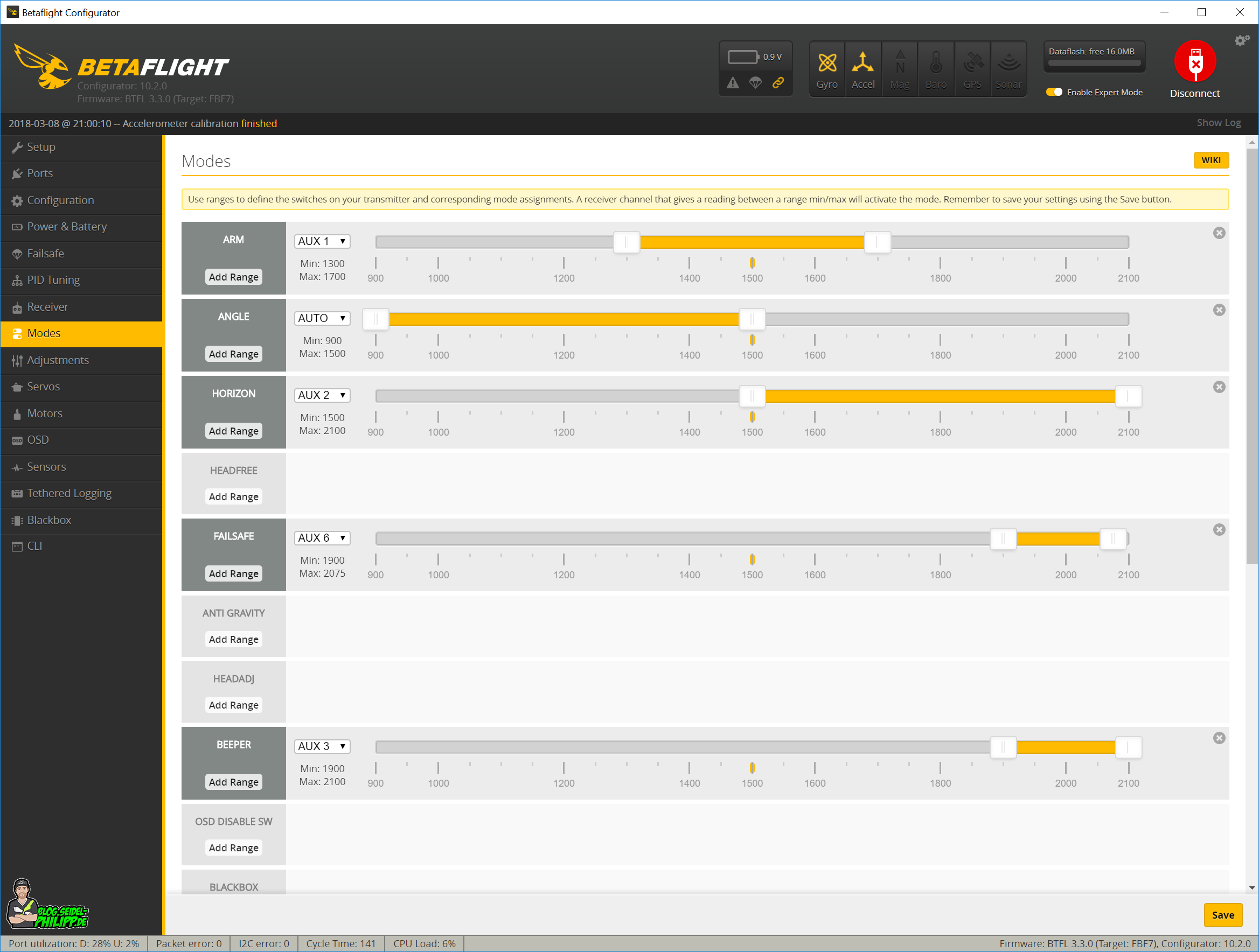
Das Prinzip der Flug-Modi Konfiguration ist sehr einfach und funktioniert wie folgt:
Die einzelnen Zeilen stellen jeweils den Flugmodus/Funktion da und sind untereinander aufgelistet. Standardmäßig ist keiner Zeile ein AUX Kanal (Schalter auf der Funke) zugeordnet. Mit einem Klick auf „Add Range“ kann man der jeweiligen Zeile/Flugmodi/Funktion einen Kanal zuweisen. In dem Dropdownmenü wo „AUX 1/2/3…“ steht, wählt man den Kanal aus. Nun kann man den gelben Bereich auf den Bereich des Kanals schieben, wo die Funktion aktiviert wird. Bei einem Zwei-Wege-Schater ist dies entweder ganz links oder ganz rechts. Wird ein Drei-Wege-Schalter verwendet, ist der dritte Bereich in der Mitte zu finden. Man kann einen AUX Kanal auch für mehrere Funktionen verwenden. Zum Beispiel um verschiedenen Flugmodi auf einen Schalter zu legen.
Folgende Funktionen können aktiviert werden:
- ARM – aktiviert Motoren
- ANGLE – stabilisierter Flug (keine Flips/Rolls möglich)
- HORIZON – stabilisierter Flug (Flips/Rolls möglich)
- HEADFREE – wenn aktiviert, hat yaw keinen Effekt auf ROLL und PITCH Eingaben
- FAILSAFE – Enter failsafe stage 2 manually
- ANTI GRAVITY – aktiviert Anti Gravity Funktion (Erklärung weiter oben)
- HEADADJ – setzt neue YAW Ausrichtung für den HEADFREE Modus fest
- BEEPER – löst den Pieper aus
- OSD DISABLE SW – deaktiviert das OSD
- BLACKBOX – startet das Blackbox Logging
- BARO – Hält automatisch die Höhe wenn ein Barometer verbaut ist
- SONAR – Hält automatisch die Höhe wenn ein Sonar verbaut ist
- MAG – Heading Lock
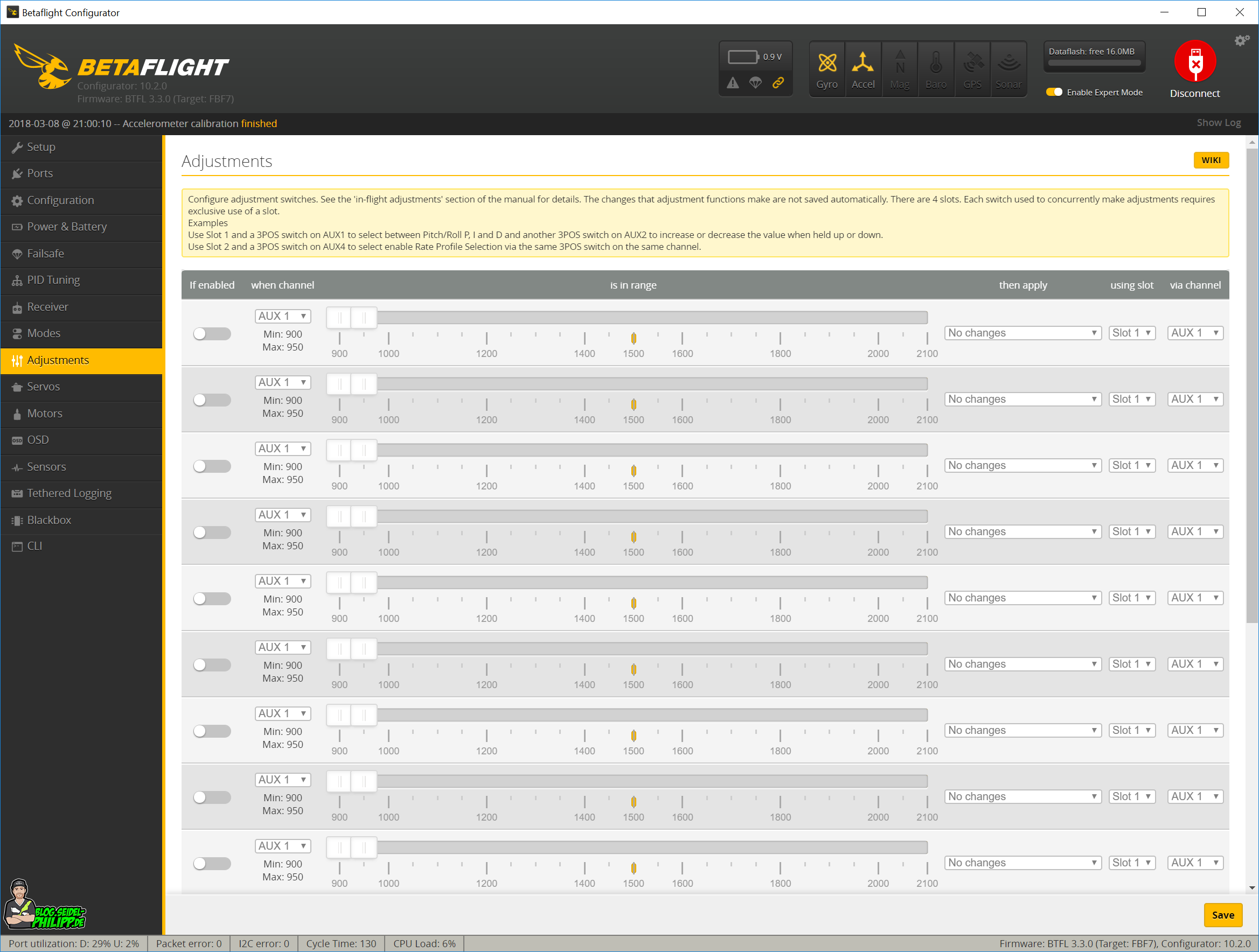
Adjustments
In diesem Menü können während des Fluges Einstellungen wie PIDs, Rates usw. vorgenommen werden. Nutze diese Funktion nur, wenn du genau weißt was du tust.
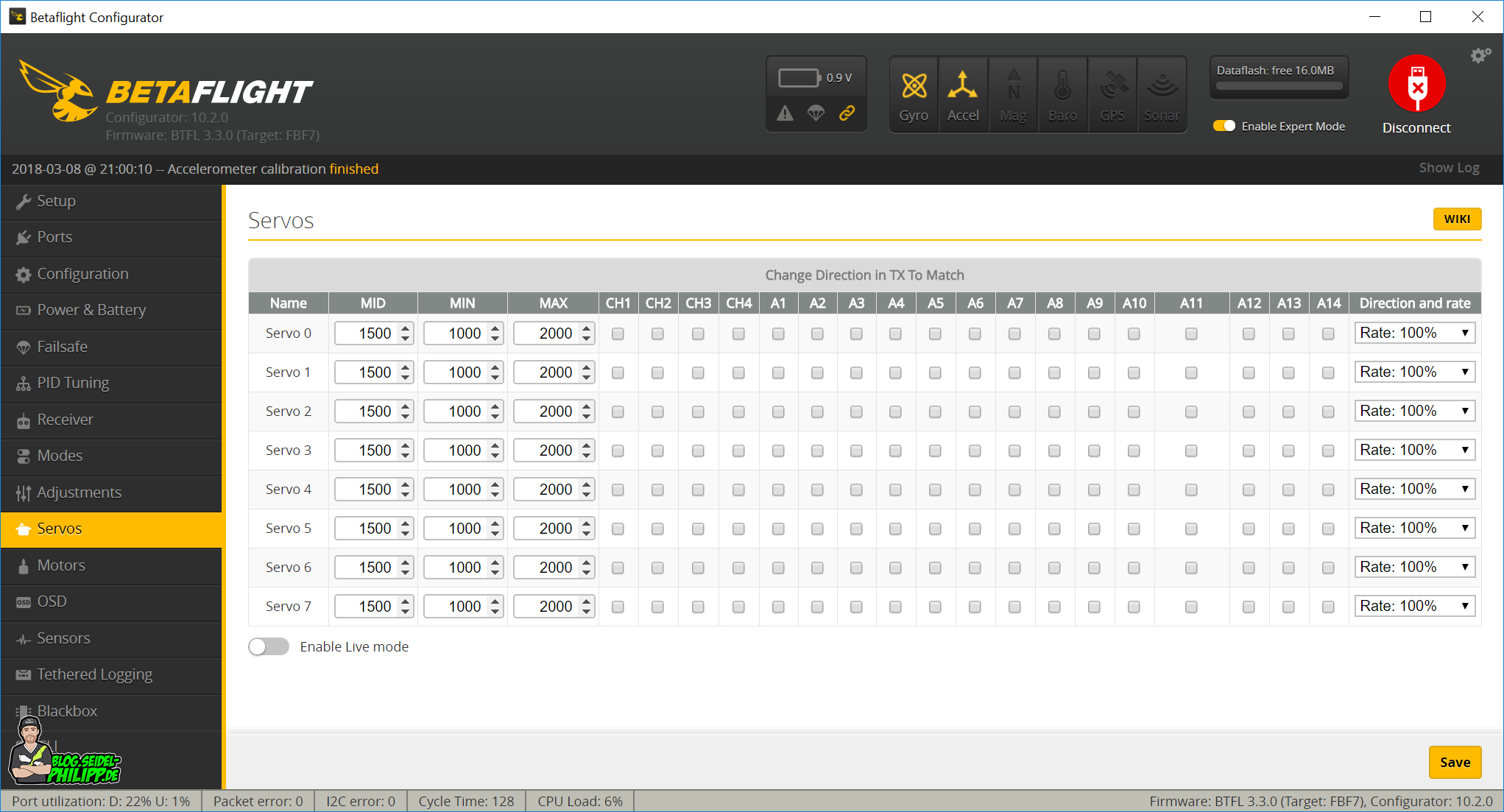
Servo
In diesem Tab können Servos konfiguriert und gesteuert werden.
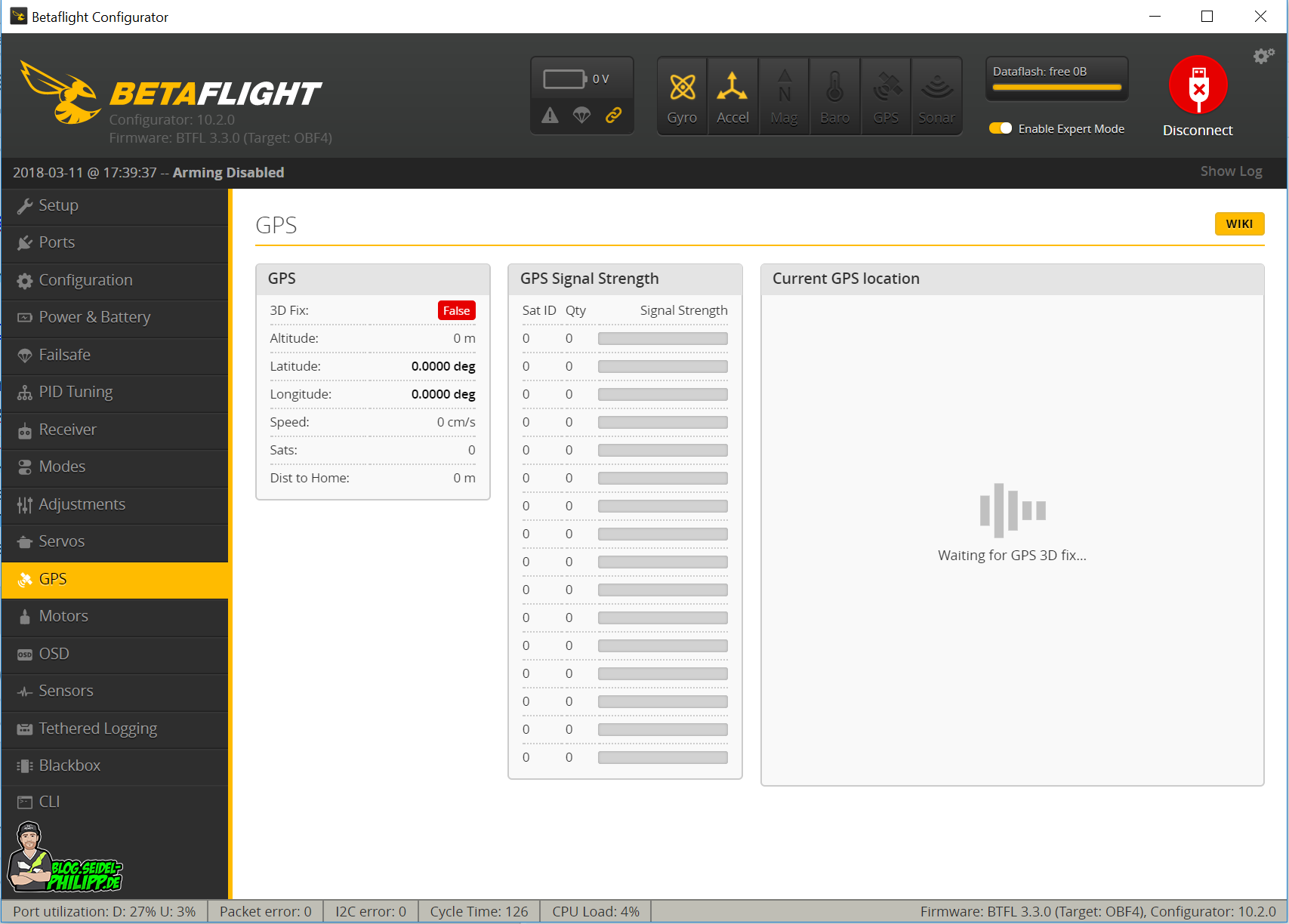
GPS
Alle Einstellungen und GPS (Global Position System) Infos wie Signalstärke, Position, Höhe usw. findest du in diesem Tab.
Motors
In diesem Tab kannst du deinen Motoren testen und ESCs anlernen.
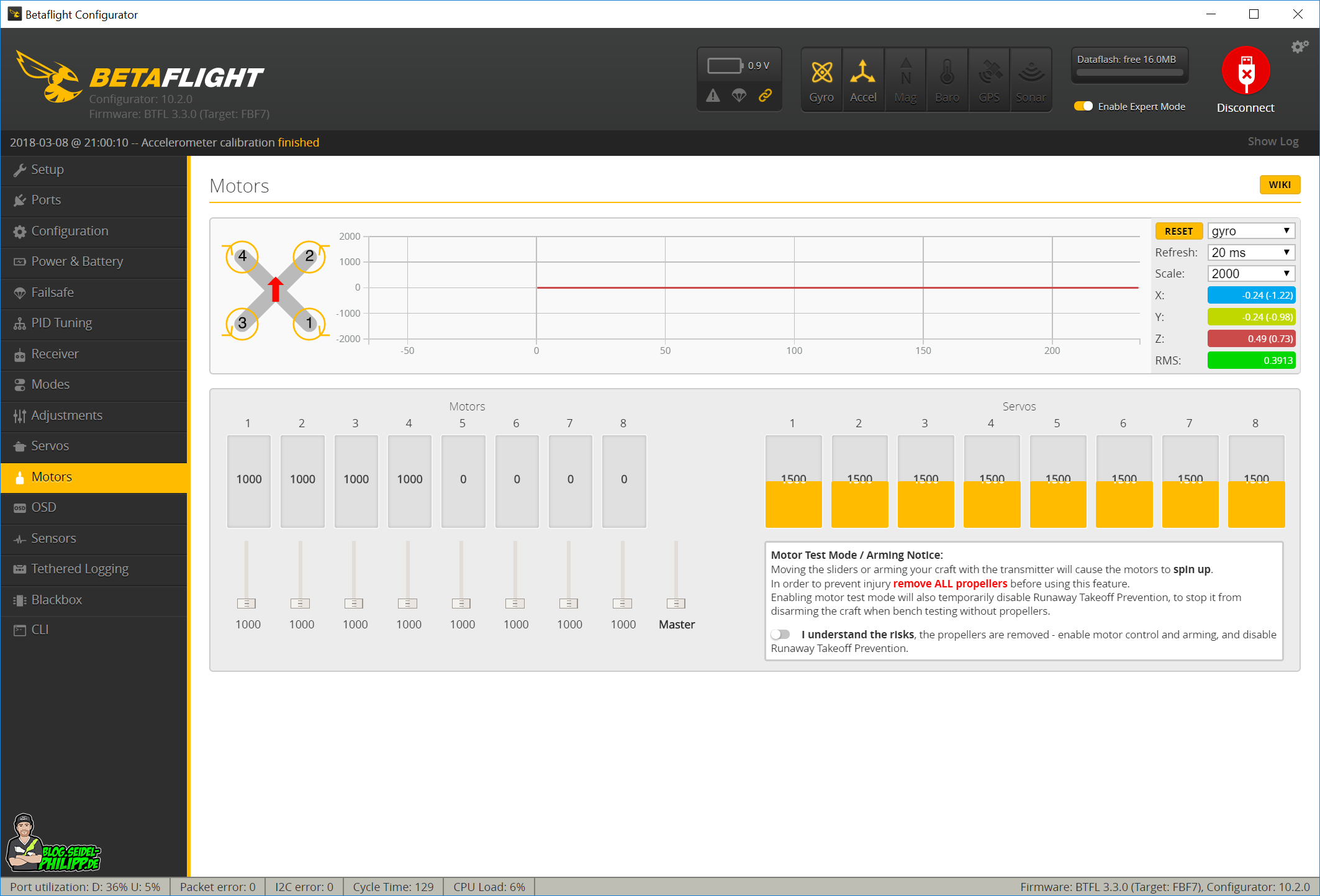
Motor Test
Um einzelne oder alle Motoren zu testen, klicke auf „I understand the risks“ und fahre mit den Schiebereglern Motoren testweise hoch. Auf diese Weise kannst du die Drehrichtung kontrollieren oder einzelne Motoren auf Vibrationen oder Beschädigungen prüfen. Ein LiPo muss angeschlossen sein, damit die Motoren getestet werden können.
ESCs anlernen
Wenn du eine ESCs anlernen möchtest, kannst du es hier tun.
- entferne den LiPo und alle Propeller
- schiebe den Master-Motor-Regler ganz nach oben
- schließe den LiPo an – es ertönt eine Melodie
- Schiebe den Master Regler mit einem Klick nach ganz unten
- es ertönt eine weitere Melodie und die ESCs booten neu
- LiPo entfernen – fertig
OSD
Wenn deine Flugsteuerung über ein Betaflight OSD verfügt kannst du dies hier umfassend konfigurieren.
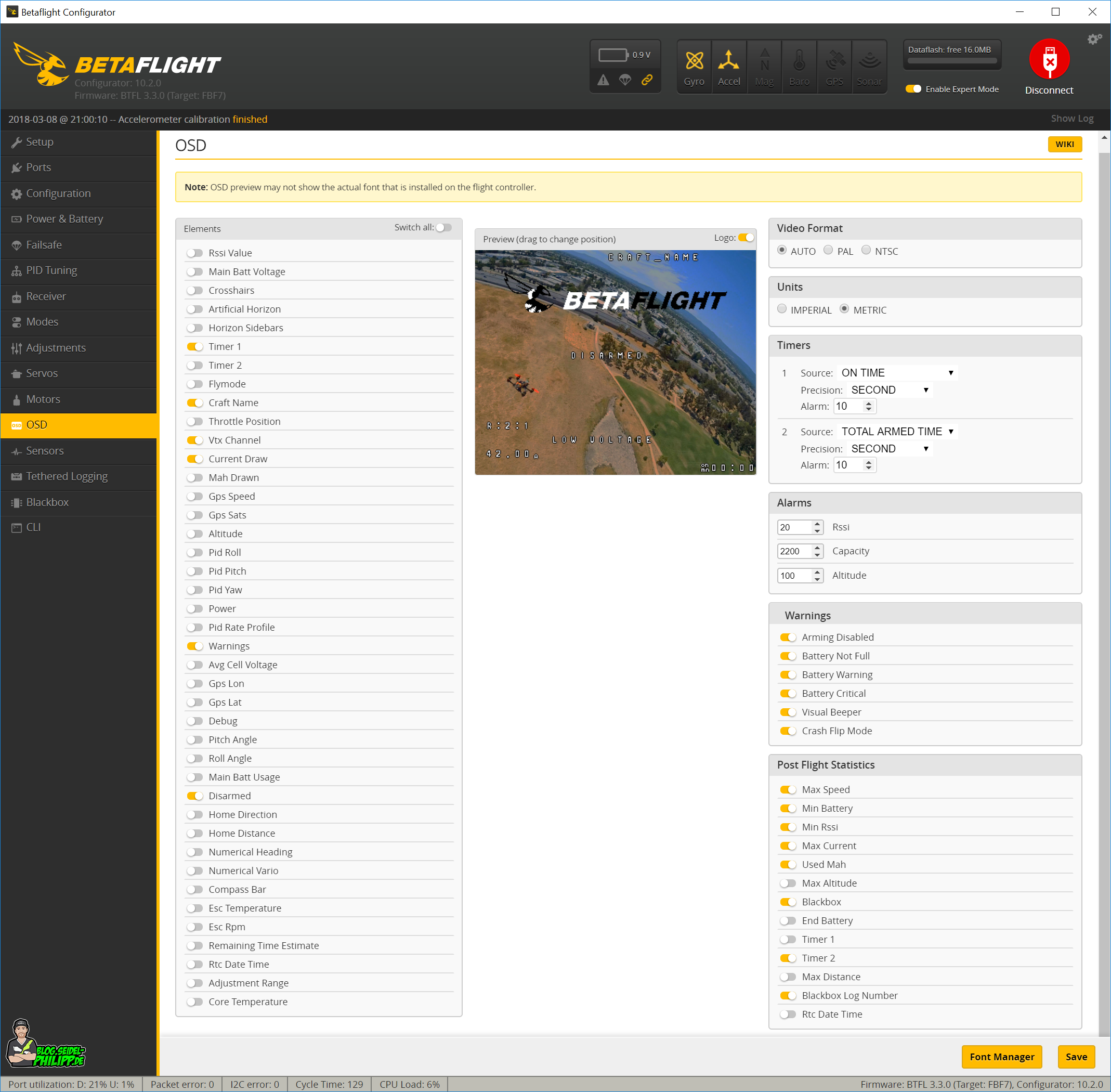
Auf der linken Seite findest du OSD Funktionen welche aktiviert werden können. Sobald sie aktiviert werden, erscheinen diese in der Mitte in der OSD Vorschau. Per Drag-and-Drop kannst du die einzelnen Funktionen an eine beliebige Stelle verschieben. Auf der Rechten Seite findest du weitere Funktionen wie Timer, Alarme, Warnungen sowie Statistiken zum Flug.
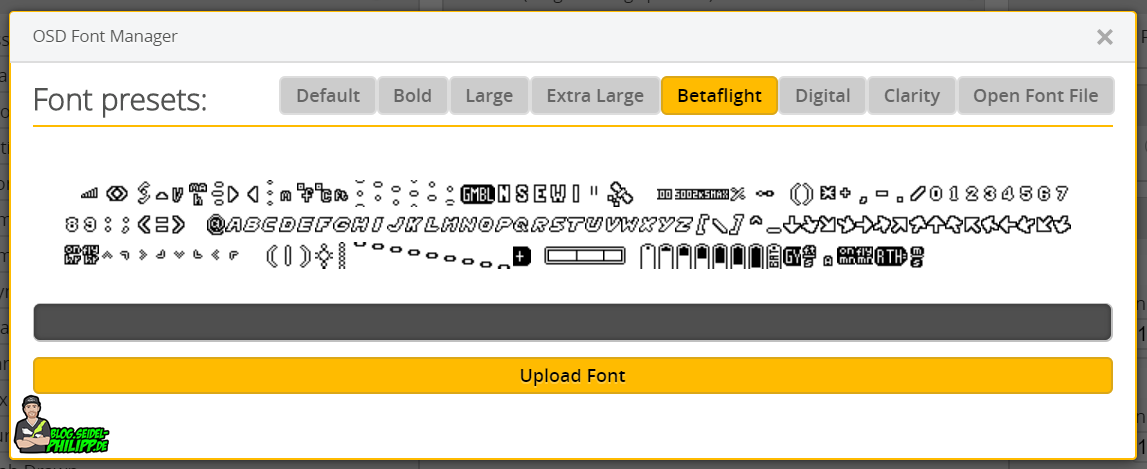
Mit einem Klick auf „FONT MANAGER“ kannst du eine Schriftart deiner Wahl hochladen. Wähle dazu eine Schriftar aus, und drücke auf „Upload Font„.
LED Strip
Wenn du externe WS2812 LEDs oder wie bei dem PDB der BrainFPV Radix eingebaute LEDs konfigurieren möchtest, kannst du diese hier umfangreich konfigurieren.

Um LEDs zu programmieren muss das „LED_STRIP“ Feature aktiviert werden. Du findest es unter „Configuration“ > „Other Features„.
Nun kannst du LEDs mithilfe des „Wire Ordering Mode“ anlegen und anschließend mit Farben und Funktionen versehen.
Ein Tutorial zur Konfiguration und eine Liste mit verschiedenen ansteuerbaren LEDs findest du hier.
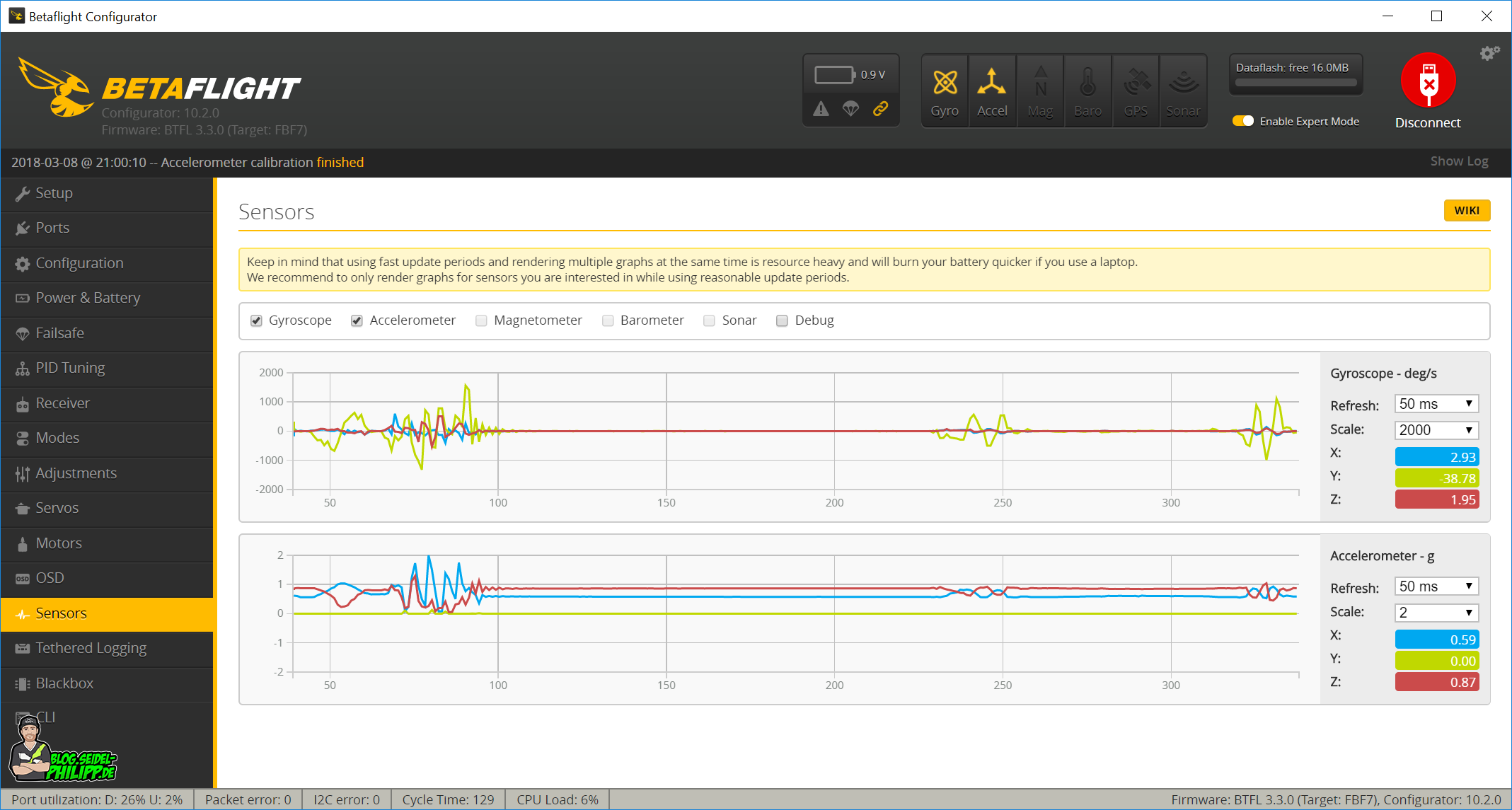
Sensors
Über den Sensors-Tab kannst du dir verschiedenste Sensor-Rohdaten anzeigen lassen.
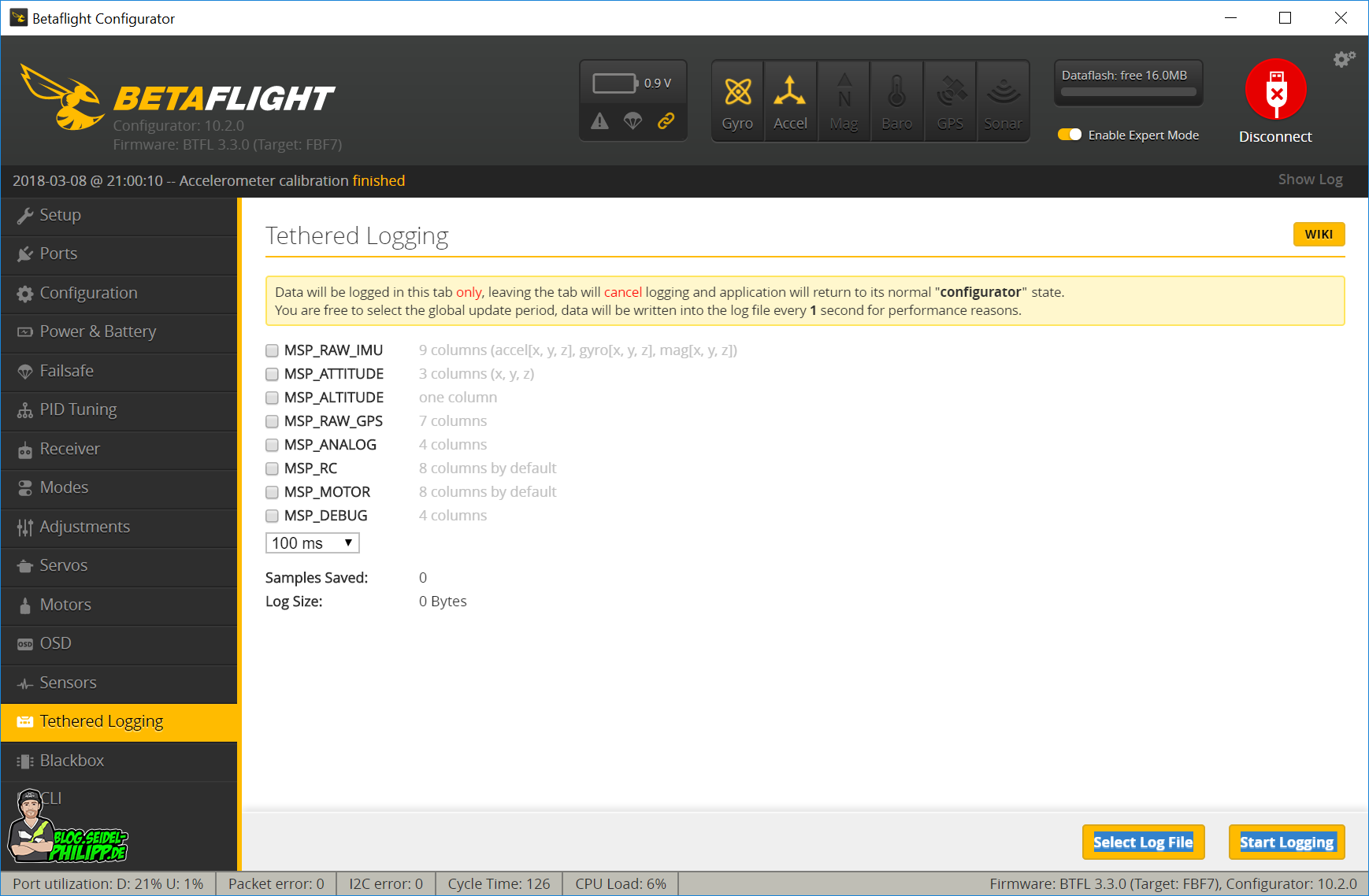
Tethered Logging
Blackbox
Hier kannst du einen Onboard Speicher oder externe SD-Karte für die Blackbox Logging Funktion konfigurieren.
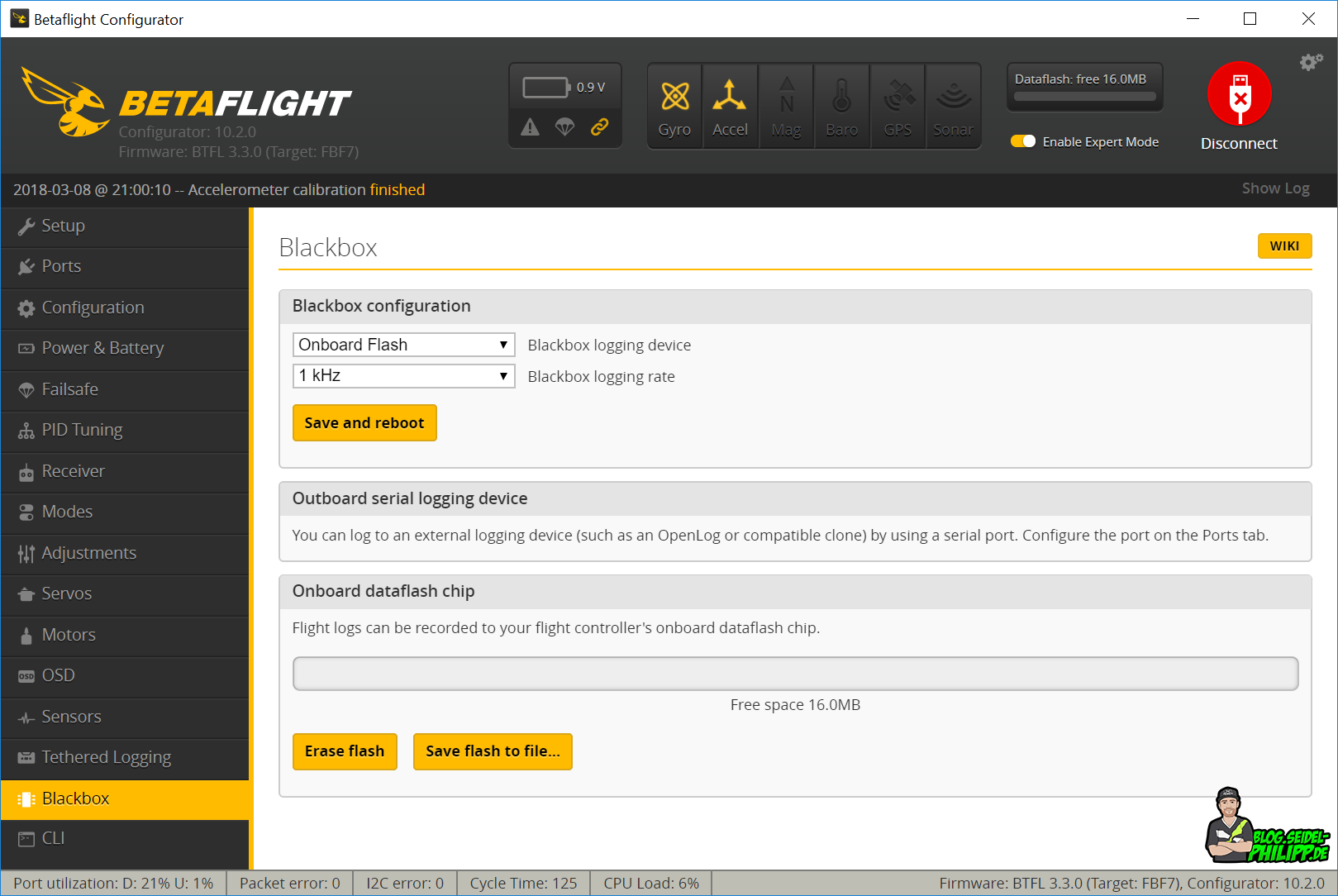
Die Logging-Rate wird als kHz festgelegt. Je höher, desto mehr Daten werden gesammelt. Über den Button „Erase flash“ kannst du den Speicherplatz bereinigen. Wenn du deine Logs exportieren möchtest, verwende den Button „Save flash to file…“
CLI – Command Line Interface
Die CLI lässt dich spezielle Kommandos an die Flugsteuerung senden. Zum Beispiel wird Resource Remapping vorerst nur per CLI unterstützt.
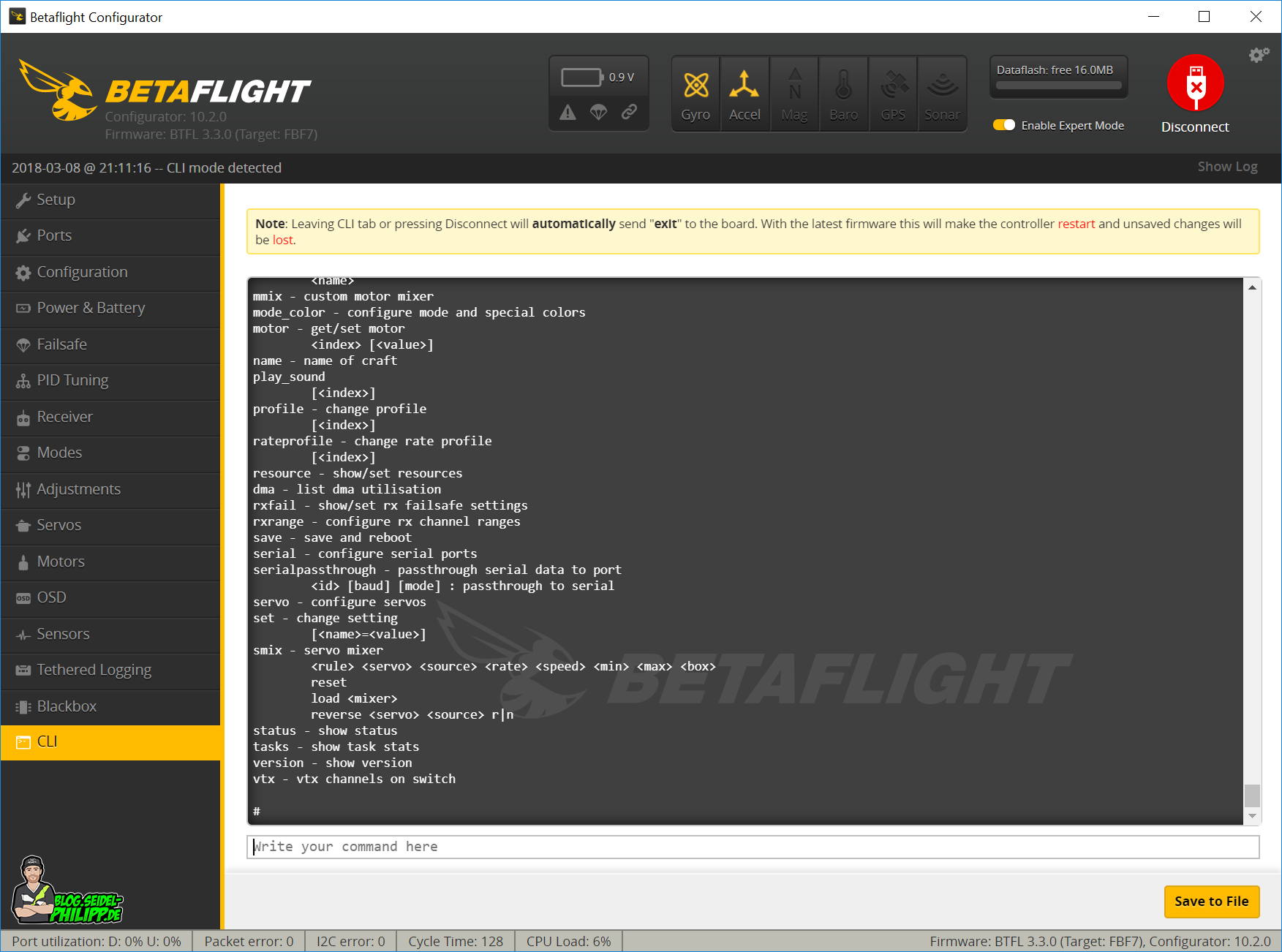
Die wichtigsten Befehle für die CLI sind unter anderem:
- dump – Backup aller Einstellungen in Text-Format
- diff – Backup aller geänderten Einstellungen in Text-Format des aktiven Profils
- diff all – Backup aller geänderten Einstellungen in Text-Format aller Profile
- save – Speichern und Reboot

Hallo, möchte einen Futaba R6303sb per Sbus am SucceX E 4F anschließen, vielleicht kann mir da jemand helfen
Hallo,
ich habe bei mir einen T-Motor F7 Controler wo der 4. Motorausgang defekt ist.
gibt es eine möglichkeit einen anderen Ausgang zu verwenden?
MFG
Hi Jörg,
du kannst es an dem Pad E5 oder E6 verwenden. Das E steht für ESC. Danach musst du per Resource Remapping den defekten Motorausgang deaktivieren und den neuen aktivieren/verwenden.
Gruß,
Phil
Hallo Philipp,
ich benutze eine SPR F3 im BI-Copter Mode (BF 3.1.7). (für einen gedruckten Samson, der aus dem AVATAR Film). Alles funktioniert soweit, nur laufen die Motoren nach dem Armen nicht über „Standgas“ hinaus. Im Empfänger Tab wird alles korrekt angezeigt, der Gaskanal läuft sauber bis MAX, die Motoren bleiben aber unabh. vom Gasstick auf dem Standgas. Im Motor-Tab kann ich problemlos die Motoren von Null bis Max ansprechen. Regler ist ein Racerstar 4in1 (nur 2 Motoren angeschlossen). Fernsteuerung ist eine MX-20, Empfänger ein GR-16 in PPM-Modus.
Ich habe mit dieser FC und den anderen Bauteilen schon erfolgreich ein Quad fliegen lassen, allerdings noch mit Cleanflight…
Bin echt am verzweifeln. Weißt du Rat?
Servus Philipp,
Als erstes Großes Lob für deinen Blog bin seit knapp drei Monaten in der Copterszene und hab mal eine Frage bei einem gebrauchten Copter den ich vor kurzem gekauft habe scheint der UART für die VTX kaputt zu sein kann man iwie einen anderen UART so programmieren das, dass wieder funktioniert ?
Hey Mike,
wenn du zum Beispiel einen Unify verwendest, kannst du ihn einfach an einen anderen UART anschließen und dann dementsprechend im „Ports“ Tab den entsprechenden UART auswählen!
Grüße,
Phil
Hallo,
ich habe eine neue Beta 65s. Sie ist einmal geflogen und danach lässt sie sich nicht mehr mit dem Controller koppeln.
In Betaflight wirde folgendes angezeigt: Arming deaktiviert aufrund: PARALYZE
Wie kann sich das einstellen ohne am PC angeschlossen gewesen zu sein? Wie kann ich das zurückstellen? Geht das auch über den Controller?
Hi Mareike,
der PARALYZE sollte eigentlich nicht konfiguriert sein bei dir. Normalerweise hilft es, den Akku erneut anzuschließen, dann deaktiviert sich der PARALYZE Mode.
Um sicherzugehen, dass du ihn nicht aus versehen aktivierst, schließe den Copter an die Betaflight GUI an und schaue unter Modes, ob er irgendwo aktiviert ist. Wenn ja, lösche den Mode.
Gruß,
Phil
Hallo Leute,
Ich habe einen Mamba f50 pro für mein DJI digitalsystem verbaut. Der Quad fliegt aber ich bekomme keine OSD anzeige und weiß daher beim Fliegen nicht meinen Akkustatus im Quad.
Custom OSD off/on macht keinen Unterschied.
Firmware ist auf Auslieferungszustand.
Bin für Hinweise dankbar.
MfG
Hey Joachim,
ich tippe darauf, dass du es entweder am falschen UART angeschlossen hast oder vergessen hast auf dem UART „MSP“ zu aktivieren. Ebenso muss das Feature „OSD“ eingeschaltet sein!
Gruß,
Phil
PS: Achja, mach bitte ein Firmwareupdate von Betaflight und der DJI Air Unit!
Hallo an alle,
Ich hab ein Problem, hab einen Marek F405 und hab unabsichtlich MSP deaktiviert. So jetzt kann ich den Computer nicht mehr verbinden ? Was kann ich tun? Beim Flashen bekomme ich auch keine Antwort.
Hallo Philipp,
du kannst diese FC im DFU Modus flashen. Auf der Produktseite zu der FC findest du sogar eine Anleitung: http://www.mateksys.com/?portfolio=f405-osd#bootdfu-mode
Kurzfassung:
DFU/Boot Button gedrückt halten
FC per USB an PC anschließen
DFU/Boot Button loslassen
in der Betaflight GUI steht dann DFU
Danach kannst du die FC wieder flashen (full chip erase bitte ankreuzen)
Gruß,
Phil
PS: Es kann sein, dass Treiber installiert werden müssen, wenn die FC nicht als DFU erkannt wird. Dazu einfach wie auf der Matek Seite beschrieben vorgehen!
Hallo ich haben den f 405 von matek, beim wechseln von 2 blatt auf dreiblatt propeller fängt der copter an zu wackeln, wie bekomme ich das raus.
Hi Oliver,
dann wird etwas mit deinen PIDs nicht stimmen. Entweder du tunest komplett neu oder du lädst die aktuellste Betaflight Version herunter und verwendest die voreingestellten Pids. Die sind meistens für 3-Blatt optimiert!
Gruß,
Phil
Hallo,
warum ist bei mir bei den Ports der erste nur hellorange hinterlegt?
Gruss Uwe
Hallo Uwe,
wenn du die Spalte „Configuration/MSP“ meinst, dann ist der Haken dort gesetzt, damit du per USB die Flugsteuerung konfigurieren kannst. Diesen Haken darfst du auch nicht entfernen, da du sonst unter Umständen nicht mehr auf deine Flugsteuerung zugreifen kannst!
Gruß,
Phil
Hi Phil
Ich hoffe du kannst mir bei meinem Problem helfen. Ich habe ein kakute f7 Board und fliege im Acro Mode mit airmode. Folgendes Problem habe ich damit.
Wenn ich stark Yaw steuere gibt der Racer Gas und wird nach oben katapultiert. Wenn ich nur ganz leicht yaw steuere passiert nichts.
Habe schon sämtliche Einstellungen durch. Empfänger gewechselt und sogar das Board getauscht.
Vielleicht hast ja du einen tip was ich dagegen tun kann.
Gruß
Matthias
Hi Matthias,
erstmal sorry für die späte Antwort, habe noch über 100 offene Kommentare hier! 😉
ich tippe auf eine falsche OpenTX Konfiguration. Hast du da zufällig einen Mixer drin, oder die Sticks nicht sauber kalibriert? Eventuell verreißt du aber auch den YAW Stick sodass du aus-versehen viel Gas gibst?
Gruß,
Phil
Hey,
ich hoffe du kannst mir weithelfen. Ich habe das Problem das meine Motoren immer höher drehen wenn ich den Gashebel nur leicht bewege, bis der Copter dann einen Frontflip macht. Habe das Problem mit aber auch ohne Propeller. Benutzte z.Z JB4 mit 4 in 1 ESC und Xing Motren mit 2450kV.
Hoffe auf eine Lösung
Gruß
Nick
Hey Nick,
ohne Propeller, ist das ganz normal, siehe FAQ.
Mit Propellern sollte das natürlich nicht passieren. Ich gehe mal davon aus, dass etwas mit der Konfiguration nicht stimmt.
Da gibt es ebenfalls einige mögliche Gründe, die ich ebenfalls im FAQ aufgeführt haben.
1. Warum flippt mein Copter?
Ich hoffe, das hilft dir!
Hallo Phil,
ich bin neu als Drohnen Bastler und habe ein Problem womit ich nicht weiterkomme.
Ich bekomme die Verbindung von dr Funke zum Empfänger nicht hin, d.H. im Tab Receiver habe ich die Anzeige der Balken aber diese lassen sich nicht mit der Fernsteuerung bewegen. Meine Fumke ist von Conrad (Reely HT-6 Hand-Fernsteuerung 2,4 GHz) mit entsprechenden 6 Kanal Empfänger. Eingestellt habe ich Serial-based receiver und SBUS. Kannst du mir da weiterhelfen?
Gruß aus Iserlohn
Michael
Der Controler ist ein SP Racing F3 Flight Controller
Hi,
Mögliche Gründe habe ich hier niedergeschrieben: Warum bekomme ich keine Ausschläge im Receiver-Tab?
Habe die Funke nicht (kann die überhaupt SBUS), aber ich würde folgende Einstellungen in Betaflight vornehmen:
Ports: SerialRX auf dem korrekten UART
Protokoll: IBUS
Schau dir mal folgendes Video an, vielleicht hilft das ja: https://www.youtube.com/watch?v=zyKM5h83smc
Gruß,
Phil
Hallo, ich habe etwas zeit gebraucht um neue erkenntnisse zu bekommen.
Den angegebenen Kontroler habe ich nicht ans laufen bekommen.
Zwischenzeitlich habe ich von Fortini F4 Controler angeschlossen und der lauft. (jedenfalls auf dem Basteltisch ohne Propeller) Angeschlossen über SBUS.
Melde mich wieder wenn ich weiter bin.
Gruß
Michael
Moin Philipp, vielen Dank für deine Arbeit eine deutsche Beschreibung von Betaflight zu erstellen, Das macht es mir wirklich einfacher.
Aber ein nerviges Problem habe ich immer noch und hoffe, dass du mir evtl helfen kannst. Und zwar habe ich eine BETA75 Pro2 mit einer Frsky FCC Version.
Taranis Q X 7 ist verbunden und alle Einstellungen kann ich vornehmen. Nur wenn ich in den Bereich Modi gehe funktioniert gar nichts mehr.
Es wird nur ein leeres Fenster angezeigt mit einem Quadrat aber ich kann dort keine Einstellungen vornehmen. Leider weiß ich nicht, welche Einstellung ich verändern muss um dort richtig arbeiten zu können.
Wenn du eine Idee hast, was ich machen kann, würde ich mich sehr freuen.
Besten Dank, Roland
Das hört sich komisch an, hast du mal die neuste Firmware geflasht? Normalerweise solltest du wenigstens die Modi sehen und dann mit einem Klick den Kanälen zuordnen können!
Das Problem hatte ich mit der Mobula7 ebenfalls. Ich hatte den betaflight konfigurator 10.4.0 drauf gemacht und dann ging es. Wenn du die neuste Betaflight Version auf den FC flashst, dürfte auch der 10.6.0 Konfigurator gehen
Hi Phil, ich hab alles ziemlich so gemacht wie es es hier beschrieben hast… im BF Konfigurator funktioniert alles gut (Pitch, Roll, Yaw, Throttle) … alle Kanäle werden beim Empfänger Tab richtig angesprochen… nur der Throttle tut nix !!! Warum ?! Muss man da noch was freischalten, konfigueriren … Im Motoren Tab funzt alles wunderbar … nur mit dem Sender nicht! Ich hoff du kannst helfen … ansonsten tut alles schon 😀 mein ESC/FC ist ein HGLRC F440 TX20 V2
Hey Ghosty627,
schau mal in der Funke nach, ob der Throttle Kanal auch von der Funke an den Copter „gesendet“ wird.
Ich denke, da fehlt einfach ein Kanal, welcher nicht konfiguriert wurde.
Gruß,
Phil
Hi Phil,
kann es sein das die neue BF Version nicht mehr mit der FW meiner „alten“ ESCs zusammen passt?
Hab mir nen neuen SPF3 Racing geholt. und die ESCs sind die Flycolor Raptor 390 20A. Ca. zwei Jahre Unterschied was das Herstelldatum angeht.
Egal welche FWs ich auf FC oder ESC versuche – der Kopter fliegt nicht richtig – kippt bei den leichtesten Gasgeben um.. und fällt manchmal in eine SChieflage aus der er nach 5sec alleine wieder rauskommt.. (kommt mir so vor als ob der sich verrechnet). Auch Vollgas nimmt der Kopter nicht an, nur noch gerade soviel das er schweben kann.
Denn das gleiche Setup hatte ich zuvor schon ohne Probleme.
HAst du nen Tipp?
Gruß
Hallo
Ich habe einen lumenier racecopter qavr erhalten. kpmme vom flächen und helifliegen. habe auch dji drohnen. welche einstellungen sind zu empfehlen für den erstflug? pod etc failsafe usw. besten dank
fc ist lumenier f4aio, motoren dys 2300kv 3s
Hey Urs,
wenn du dir Acro Mode zutraust, fliege gleich im Acro Mode. Ansonsten als Flugmodues erstmal Angle oder Horizon. Failsafe bitte auf cut stellen!
Gruß,
Phil
Hallo,
ab welcher Betaflight Version werden denn die Multiplex Flexx 4/16 Empfänger (also Version 2) unterstützt? Oder können diese beide (V1 und V2) nun unterstützen?
Grüße
Hey Gero,
das weiß ich leider nicht, habe mich mit Multiplex noch nie beschäftigt!
Gruß,
Phil