
Flyduino KISS FC Manual

![]()
![]()
The KISS FC Manual
Inhaltsverzeichnis
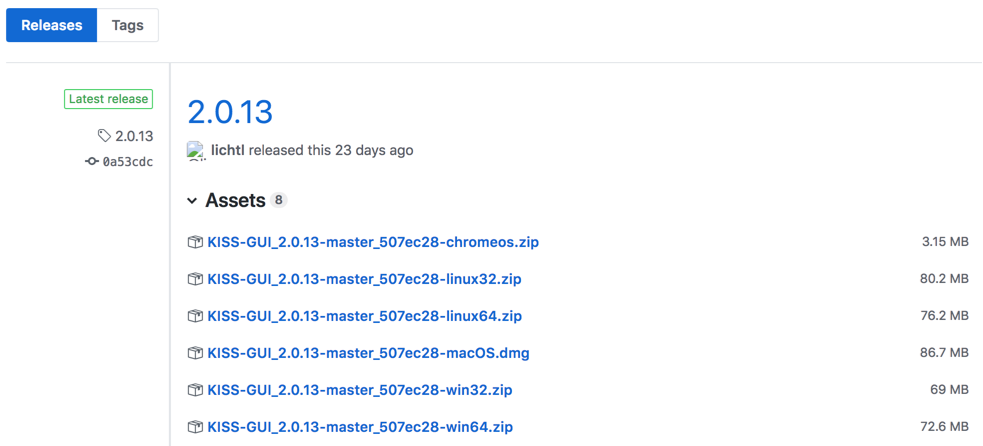
Installation of Standalone GUI
The KISS standalone GUI is available via download on GitHub for Windows, Mac, Linux and ChromeOS.
Android-App
to the download of the Android App
Installation:
- download .apk
- Accept installation from unknown sources
- Installation
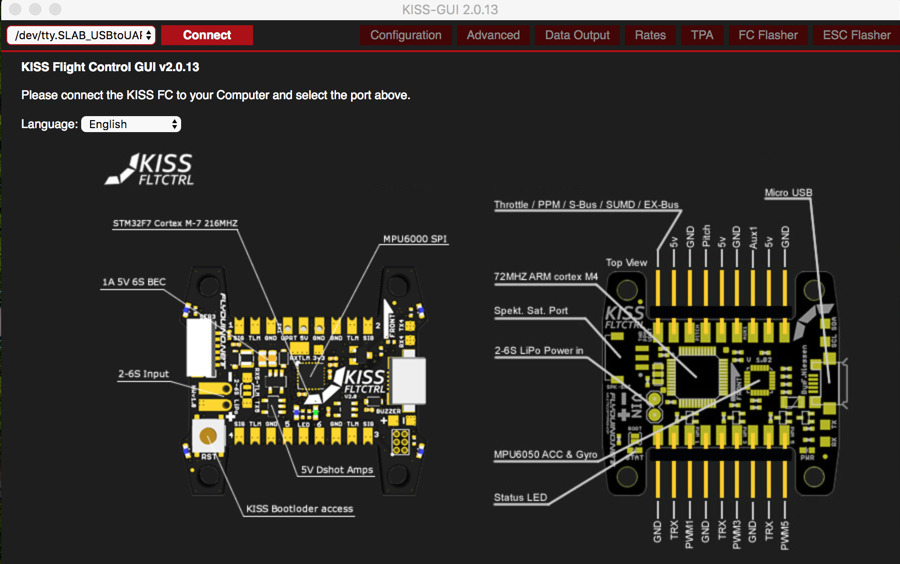
Start screen
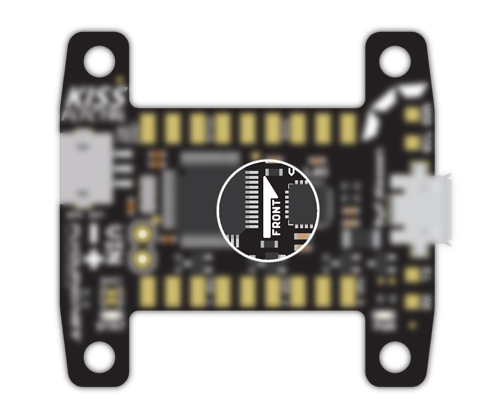
This is the start screen which looks the same on all devices. In the middle you find a representation of both sides of the KISS FC and how to connect the individual components to it.
Once you have connected your KISS FC via USB, a new com port will appear in the drop-down menu in the top left corner. Here you have to select the correct port and click „Connect“.
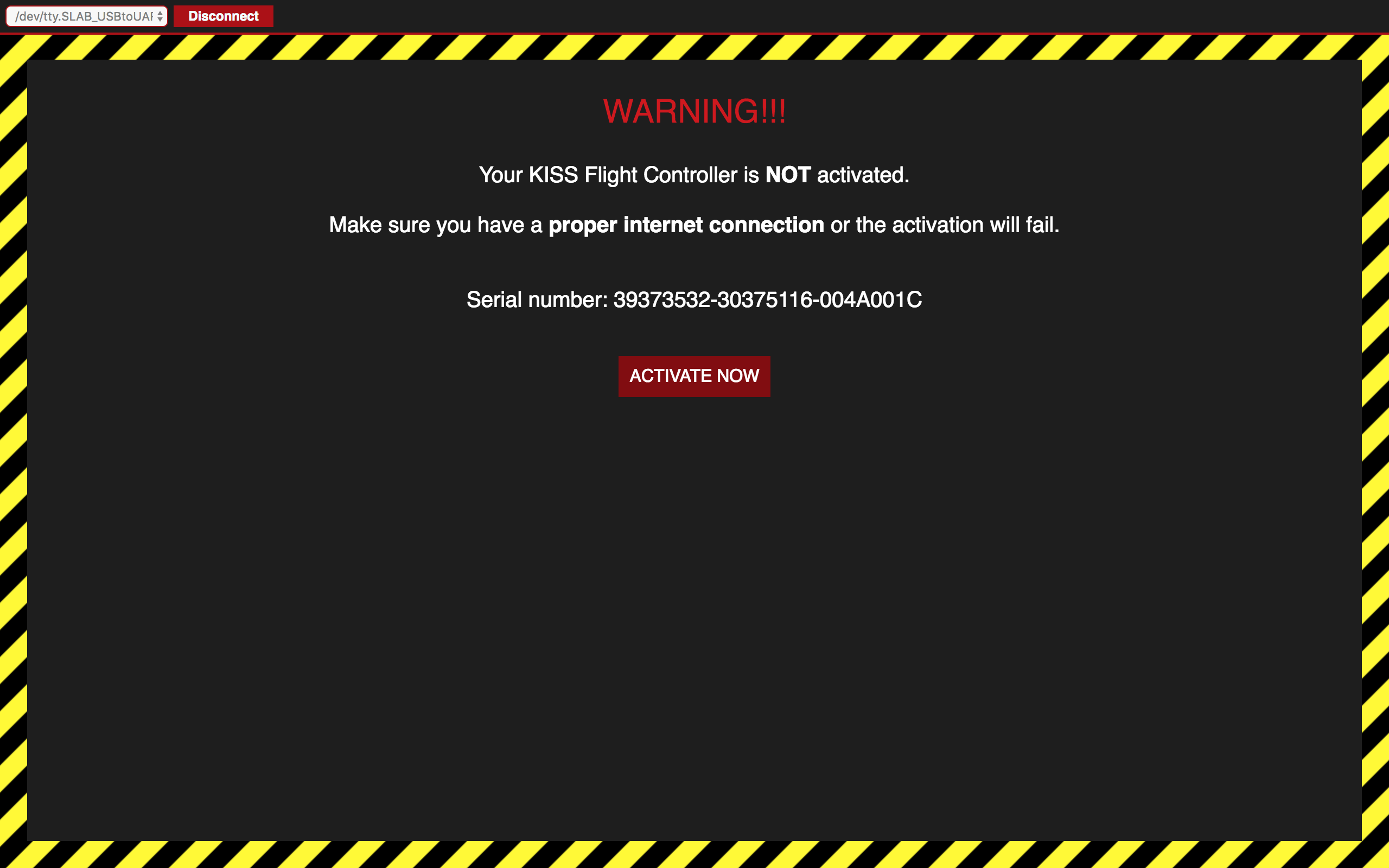
Activation
If you are connecting the FC to the GUI for the first time or with new firmware flashed, you need to activate it. Each flight controller has a unique serial number that needs to be checked with the Flyduino database. You need an internet connection.
If the activation process does not work, please contact Flyduino:

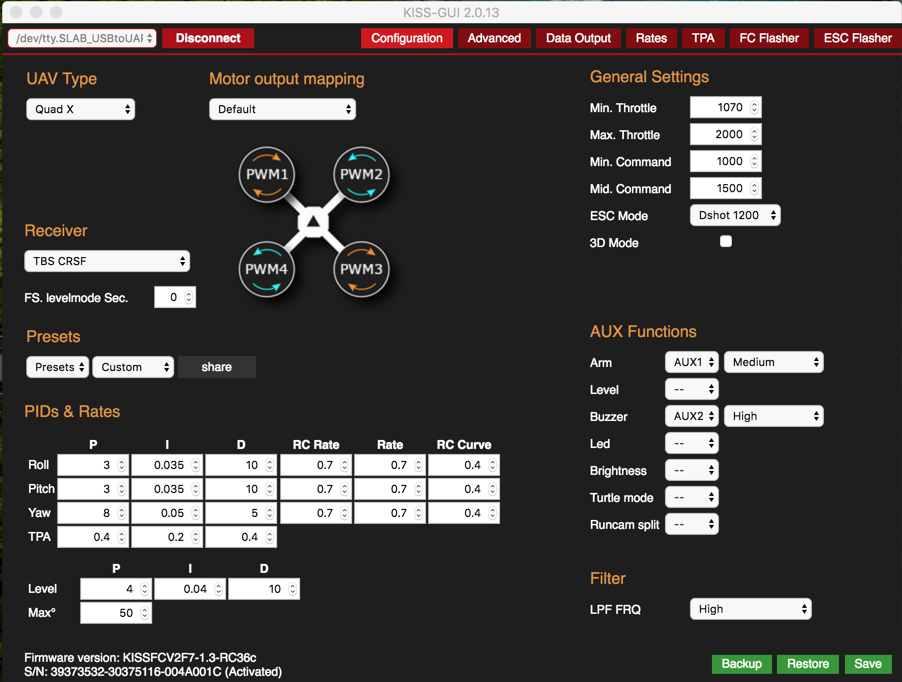
Tab: Configuration
Here you can set up basic settings for the copter. Among others for ESC, Failsafe and receiver settings.
By the way, at the bottom you will find the currently installed firmware version as well as the serial number of the flight control.
Backup
To backup all settings as a file, click on „Backup„. With „Restore“ you can restore a backup. With the button „Save Settings“ you save changed settings.
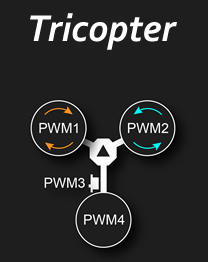
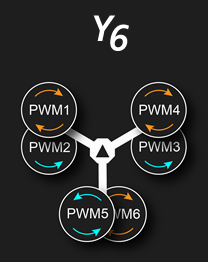
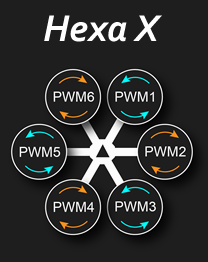
UAV Type
In this menu, you decide which type of copter you want to fly.
Standard is: Quad X
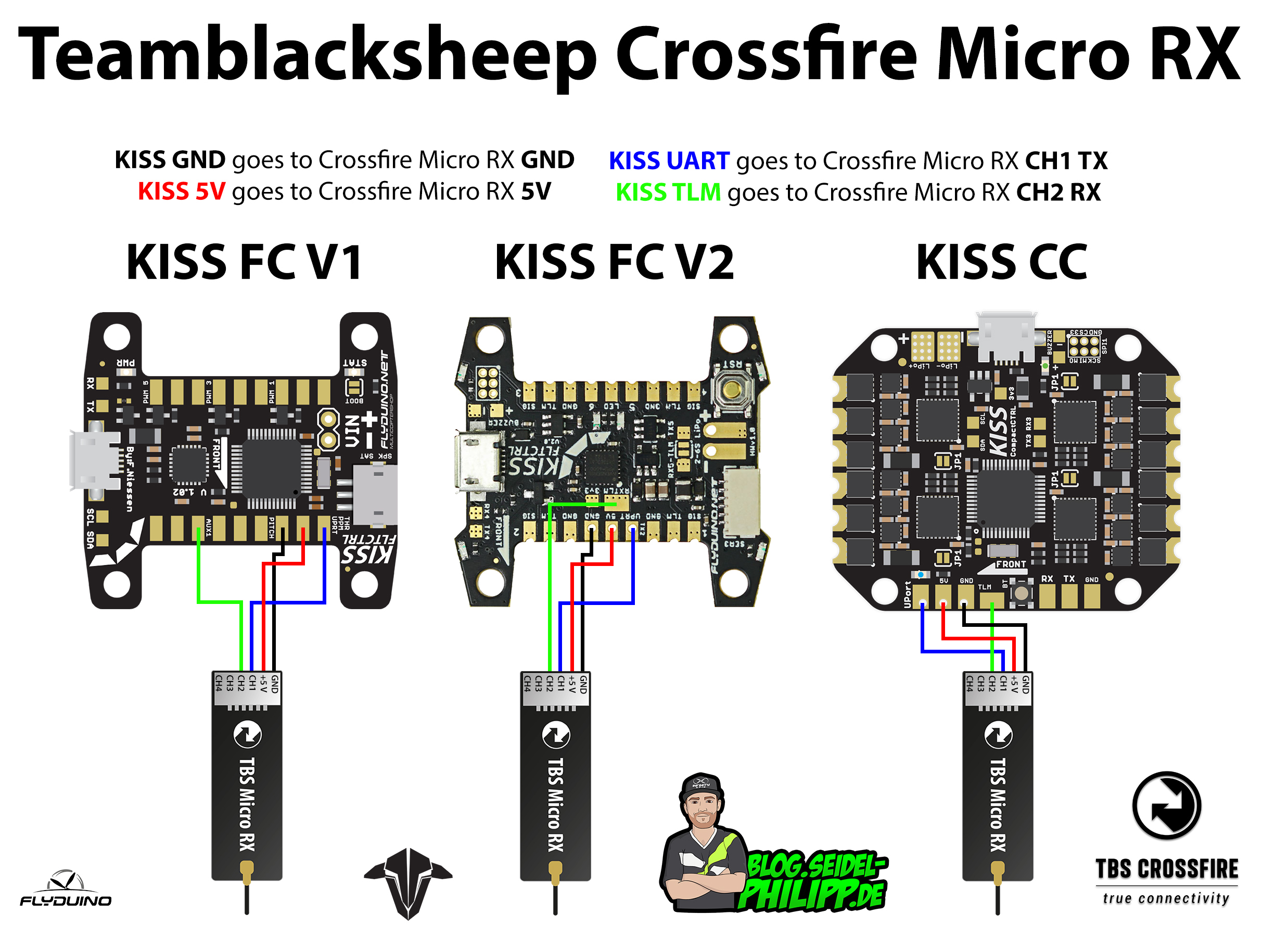
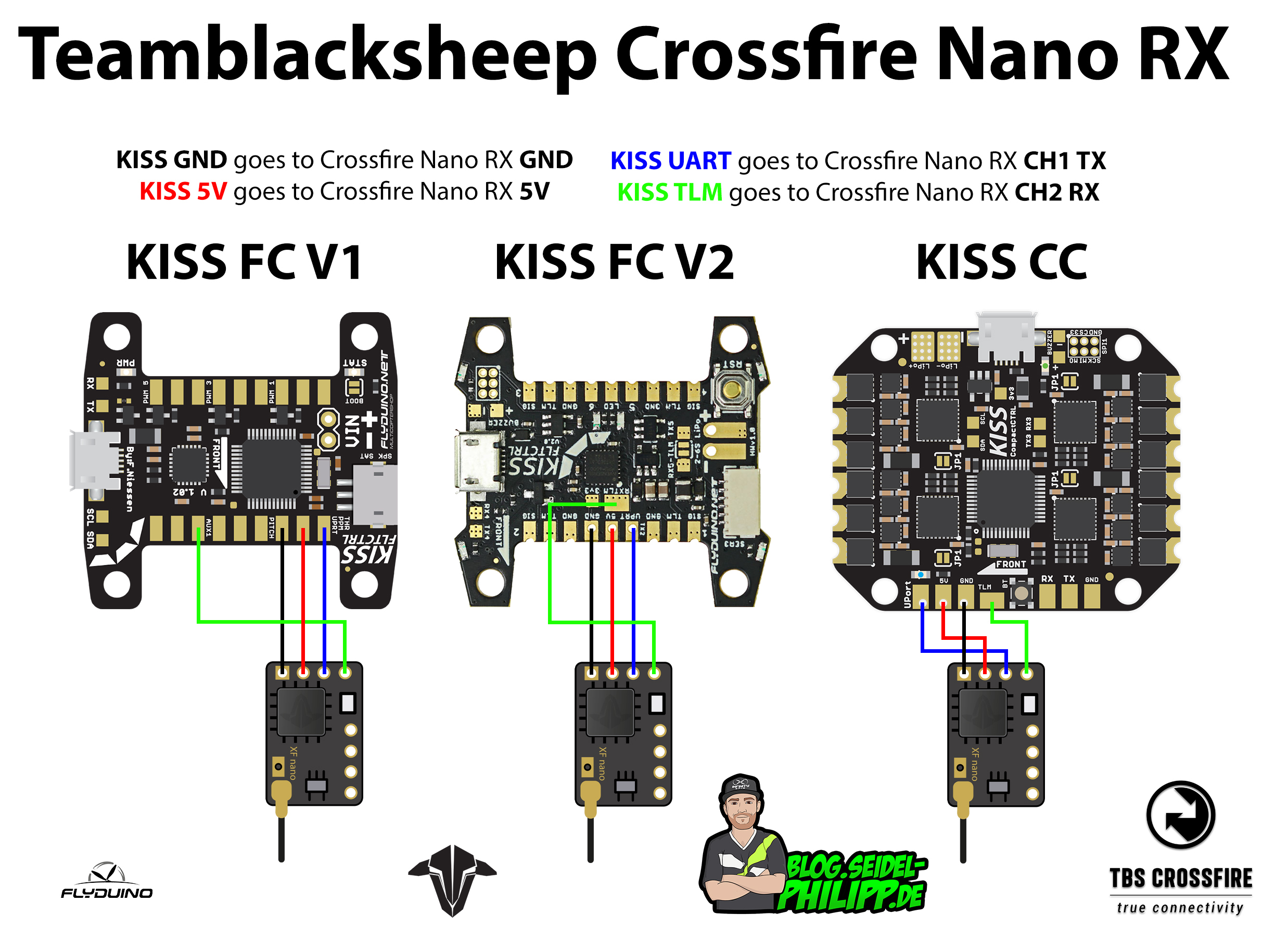
Pay attention to the direction of rotation and the correct PWM output when mounting the motors. It is also important to ensure that the flight control is correctly aligned with the flight direction arrow. You can find a connection plan here:
- KISS FC V1 – Wiringplan
- KISS FC V2 – Wiringplan
- KISS FC V2 + WOLD PDB Wiringplan
- iFlight KISS FC V1 Wiringplan


Receiver
Depending on what receiver you are using, you can select the appropriate one from this drop-down menu. PPM channel order can be found in all combinations.
- PPM: Thr, Roll, Pitch, Yaw
- PPM: Pitch, Thr., Roll, Yaw
- PPM: Thr, Pitch, Yaw, Roll
- PPM: Roll, Pitch, Yaw, Thr.
- PPM: Pitch, Roll, Thr., Yaw
- PPM: Roll, Pitch, Thr., Yaw
- Spekt. Sat. DSM2
- Spekt. Sat. DSMX
- FrSky S-BUS
- FrSky S-BUS (not inverted)
- Futaba S-Bus
- Gr. SUMD
- Jeti Ex Bus
- Multiplex SRXL
- JR XBus Mode B
- TBS CRSF
- FrSky F-Port
- FrSky F-Port (inverted)
PID & Rates
Here you can adjust your PIDs and Rates as usual. There is also an extra tab for rates. No matter which of the two menus you change the counters, they are the same in both places.
Presents
Flyduino has created an online database for User-PIDs. Through this database, each user can share their PIDs with the community and, if necessary, load PIDs from the community directly into the KISS FC.
General Settings
Min Throttle
minimum throttle value for the motors
Max Throttle
maximum throttle value for the motors
Min Command
the throttle value from which the PID controller starts to operate
Mid Command
ESC throttle value for switching the direction of rotation in 3D-mode
ESC Mode
Select ESC Signal protocol: Oneshot42, Oneshot125, PWM, (Dshot150, Dshot300, Dshot600 if ESCs supported this)
3D Mode
If checked, the 3D mode is activated, for which of course you still need to activate 3D Mode for all ESCs.
ESCs calibration
All KISS 32Bit ESCs / DSHOT do not need to be calibrated.
Always perform this process without the propellers!
- unplug LiPo
- Click “Enable Motors Test” in the “data output” tab
- Click the check box next to motors
- Turn on the remote control, check each PWM checkbox 1 to 4
- Give 100% throttle, the throttle should move to 2000 in the receiver area
- Plug in the lipo, wait until you hear the motor beeps
- Uncheck “enable motor test”
- Unplug the lipo, unplug the USB, Turn off the radio
Airmode
To activate Airmode: Set “Min Command” to 1000 and arming with an AUX channel
AUX Functions
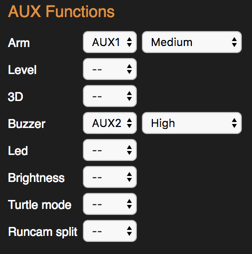
Here you can configure up to four AUX channels.
The following selection options are available
- Arm – Arm/Disarm
- Level – activate Angle/Level-Mode
- 3D – activate 3D-Mode
- Buzzer – activate Buzzer (if you are looking for your quad in the high grass, for example)
- Led – LED ON/OFF/COLOR
- Brightness – Helligkeit der LEDs einstellen
- Turte Mode – Flip the copter when it’s upside down
- Runcam Split – controls the RunCam Split / Split Mini
An AUX channel can be assigned to each of the above-mentioned alternatives, as well as a value:
- Low + Medium (In the vicinity of 1000–1500)
- Medium (In the vicinity of 1500)
- Medium + High (In the vicinity of 1500–2000)
- High (In the vicinity of 2000)
- Knob (only for Led/Brightness)
Filter
LPF FRQ: Adjust low pass filter against oscillations
- Off
- High (lowest filtering)
- Medium High
- Medium
- Medium Low
- Low
- Very Low (highest filtering)
- Advanced Settings
Motor Output Mapping
If you want to remap your motors, you can adjust the new arrangement in this dropdown menu.
There are following options available:
- Default
- 90° CW
- 90° CCW
- 180° CW/CCW
- Upside-Down
- Upside-Down 90°CW
- Upside-Down 90° CCW
- Upside-Down 180°
Note: If you are using „Motor Output Remapping„, + rotating the FC (eg. KISS CC) you will also need to change the „Custom FC Orientation“ setting in the „Advanced“ tab accordingly.
Advanced
Here you can make further settings for your KISS FC and connected accessories.
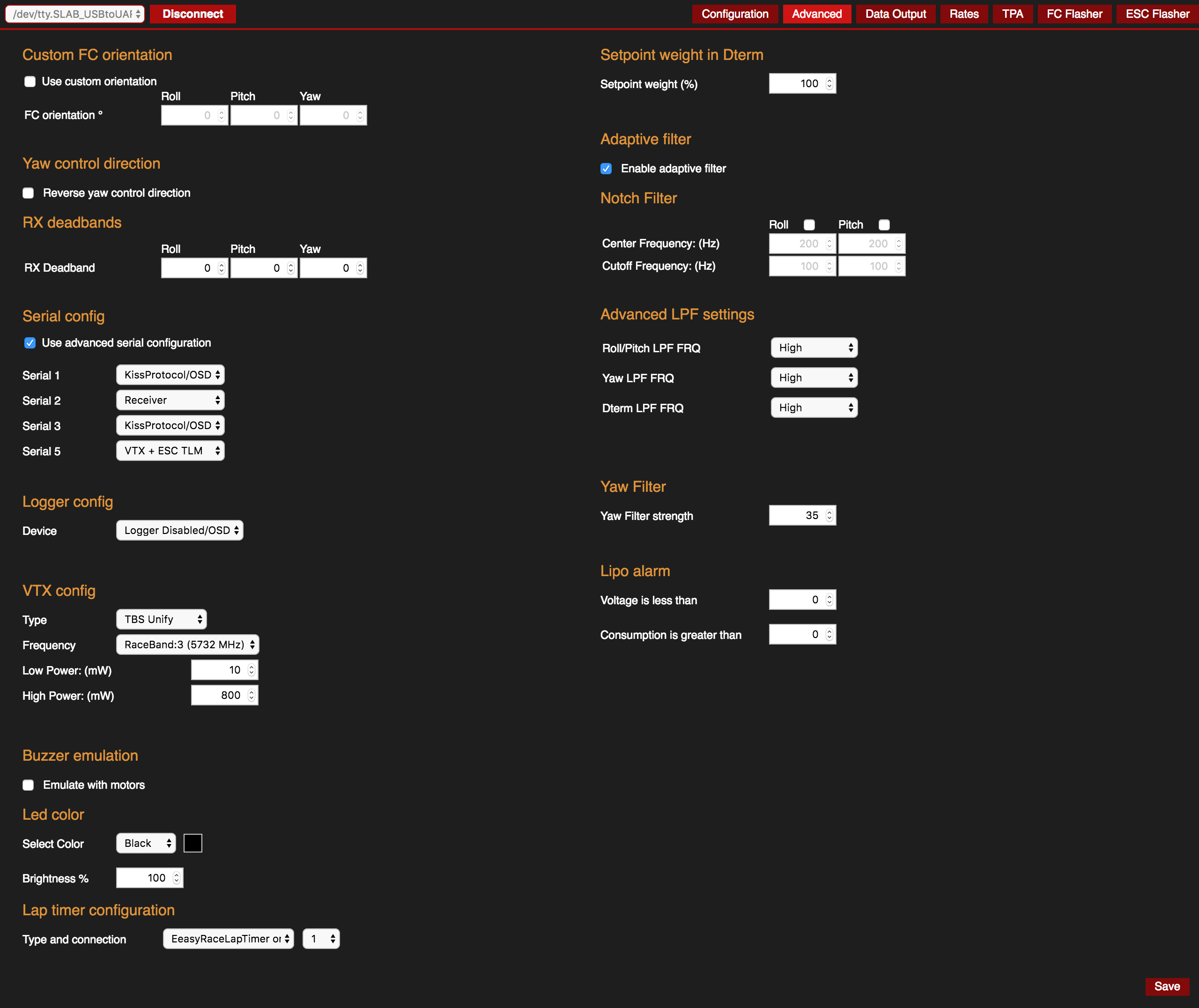
Custom FC orientation
If you do not want your KISS FC to be aligned with the direction of the arrow in the direction of the flight, you can turn the KISS FC under this menu. You can specify a positive or negative angle on each axis.
Negative = turned to the left
Positive = turned to the right
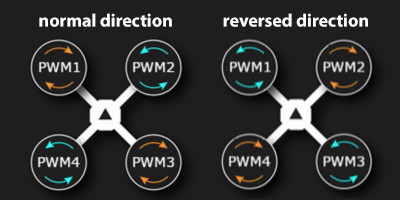
Yaw control direction
Möchtest du, dass die Propeller nach außen drehen, kannst du es über dieses Häkchen aktivieren.
RX deadbands
Setting in the FC firmware that interprets / „smoothes“ control commands near mid-position to a certain extent as mid-position. Needed if the remote control can not always exactly hit the middle position or the channel is „shaking“ (jumping back and forth). Values from 0 (no influence) to 250 (maximum influence) can be entered.
Serial Config
Under „Serial Config“ and checked „Use advanced serial configuration“ you can assign the serial interfaces 1,2,3 and 5 individual functions.
You have the choice:
- KissProtocol/OSD
- Logger
- Receiver
- VTX
- ESC TLM
- RunCam
- VTX+ESC TLM
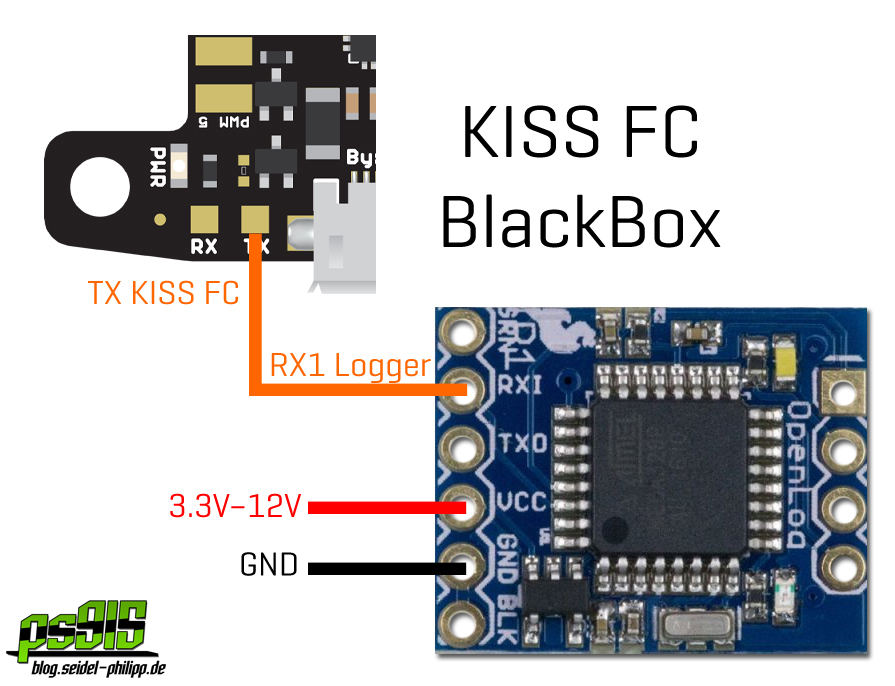
Logger Config
In addition, a serial logger can be fed with data.
The following data can be logged in a “resolution” of 10–100%:
- Raw Gyroscope
- Raw Accelerometer
- ESC Voltage
- ESC Current
- ESC Temperature
- ESC RPM
- ESC Consumption
Blackbox/ Logger Hardware: Flyduino (OpenLog)
Storage medium: A Class 10 MicroSD Card is recommended
Log Viewer: Cleanflight – Blackbox Explorer (Google Chrome extension)
VTX Config
If you have connected the data line of your VTX (eg TBS SmartAudio) to the flight control, you can configure it here. You can choose between the ImmersionRC Tramp / Furious FPV Stealth Race VTX or the TBS Unify Pro HV Race / TBS Unify Pro HV.
Buzzer Emulation
Emulate the buzzer sound via the motors / propellers.
LED Color
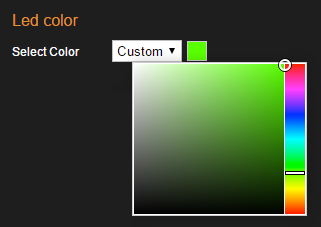
The following colors can be selected.
Black, White, Yellow, Orange, Red, Purple, Blue, Green, Cyan, Custom
The LED is connected as follows.

It is recommended to choose an external and sufficiently sized 5V power source.
Lap Timer![]()
With an IR LED and a 30 Ohm resistor, you can use the EasyRaceLapTimer.
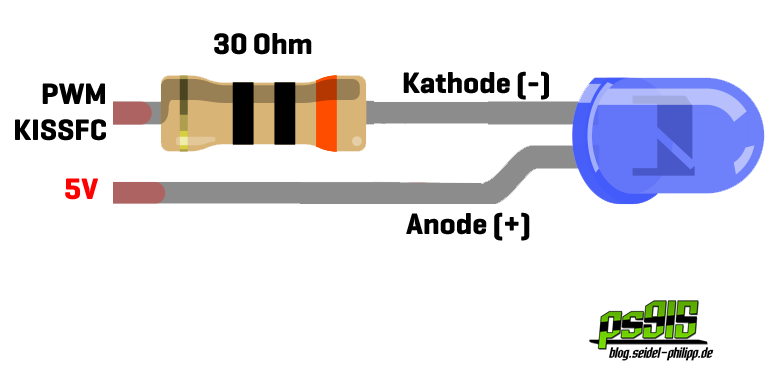
The following outputs can be used: Buzzer Pin, PWM5 Pin, PWM6 Pin
Setpoint Weight in Dterm
Sets „Setpoint Weight“ in percent.
It changes responsiveness of your quad to the stick movements. 100% feels more direct. 0% feels smoother.
Adaptive Filter
Activates the „Adaptive Filter“
The „Adaptive Filter“ (programmed by Alexander Fedorov) filters out gyro noise before it enters the „pid loop“. Depending on the frequency, the calculation is adjusted.
By the way: on the KISS FC V2 the filter runs 12x faster and filters „more aggressively“ than on the KISS FC V1.
Note: The „Adaptive Filter“ is only available if a Looptime of 1kHz is selected.
Notch Filter
The Notch Filter is only needed to filter a certain small range of frequencies where vibrations might occur.
Only then you should activate it and adjust it by inspecting the BB log files.
Center frequency is the center of the range you want to filter.
Cutoff frequency adjusts the frequency range above and below the center
Example
filtered range = lowest freq to center − lowest + center
filtered range = 300 to (400 − 300) + 400 = 500, so range is 300 − 500Hz
Advanced LPF settings
Advanced settings of the LPF (Low Pass Filter)
Yaw Filter
YAW filter strength targets the amount of influence, the filter has on YAW.
This filter was introduced to get rid of grinding noises that might occur on certain setups.
It is independent from the main notch filter.
At 0 the filter is off. The filter acts exponentially so the higher the strength, the more filtering.
Example
setting the filter from 92% to 97% will affect the filtering more than going from 50% to 60%
Mix value = old value x (0%) + new value x (100-0%)
Lipo Alarm
Lipo Warning if the set limit is exceeded. Adjustable range is 0–26 V.
Tab: Data Output
Under “Data Output” you can see various sensors and information such as the LiPo voltage, MCU calculation, angle in which the flight controller is located and much more.
„Mode“ indicates the current flight mode.
„Status“ indicates whether the model is “armed” or “disarmed”.
Calibrate Accelerometer
Button for calibrating the acceleration sensor
Receiver
Here you can check if your channels are correctly assigned and working correctly. Likewise, you can see here if your channels centers are correctly set to 1500us. If not, you can set these by subtrim in your radio.
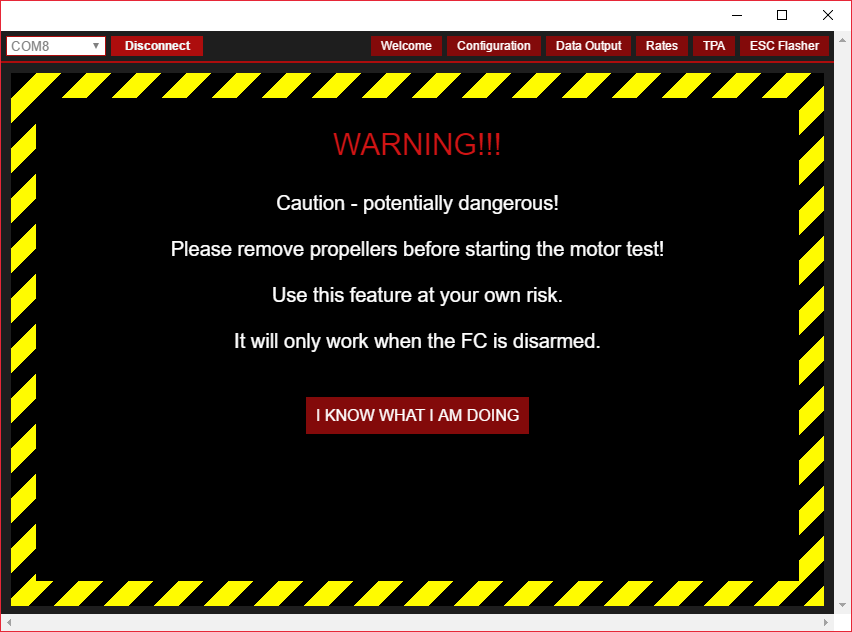
Motor Test
In the “Motor Test” you can do this by clicking “Test” under “Motors”.
Caution: Always remove the propellers when working with a plugged LiPo on the flight controller.
Tab: Rates
In this window, you can set your advice and test the same. You will also see the current number of flips, rolls, or turns on each axis.
Tab: TPA
This menu allows you to automatically adjust (increase / decrease) your PIDs based on your throttle value. This is often used when you have oscillations at full throttle. With the use of TPA you do not need to change your PIDs to counteract the oscillations.
There are 4 points where you can automatically adjust your PIDs.
- Starting point at 0% throttle and 30% TPA
- individual breakpoint 1 (here at 30% throttle and 0% TPA)
- individual breakpoint 2 (here at 50% throttle and 0% TPA)
- Endpoint at 100% throttle and 100% TPA
Tab: ESC Flasher
In this tab, ESCs are flashed and configured!
ESCs are flashing
You need ESCs with at least version 1.02 (Tutorial) to use this feature. To flash a LiPo must be connected.
Again, for safety resons: Remove props!
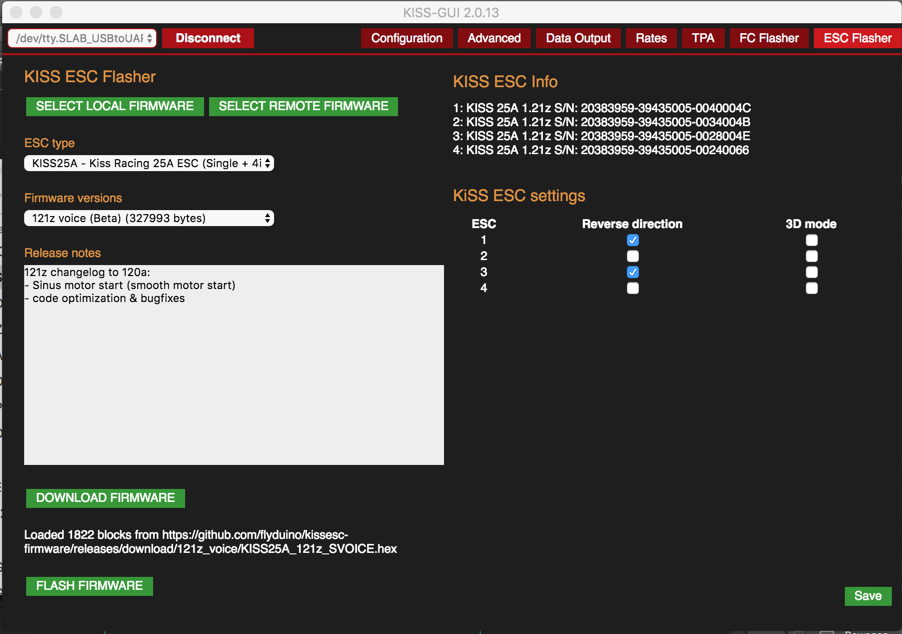
After clicking on „SELECT REMOTE FIRMWARE“ a dropdown menu will appear where you can select the desired firmware. To continue press „DOWNLOAD“ and then „FLASH FIRMWARE„.
Alternatively, „SELECT LOCAL FIRMWARE“ allows you to select and upload a firmware file from your computer. You can find them here for download.
Configure KISS ESCs
Under „KISS ESC Info“ all ESCs with the corresponding serial number and firmware version are listed.
Direction of rotation of the motor or 3D mode is set under „KISS ESC settings„.
I hope you liked my KISS FC manual and you recommend it to other pilots. If you have any questions, do not hesitate to submit them in the comments below. Thanks!

Halo.
I used kiss v2 and crossfire. Please help if i used mwosd as crossfire LQ indicator. What value for rssi max….. And rssi min…. Thanks
Phil,
Fantastic manual!- I will be using it for my first Kiss Build- Apex Mr Steele edition. I’m using Kiss FC V2 with the Kiss 4in1 ESC. My question is this:
If I mount the ESC sideways as Steele does in his build video, do I have to re-map the motor positions (ESC positions) in the Kiss GUI? And if so how?
Hey Greg,
there is an option to rotate the motor outputs. So no remapping needed, just rotate it via the Dropdown to your desired angle!
Phil
Hoi Phil,
ich habe die KISS FC v2 verbaut und das GUI v2.0.0 im Einsatz. Mir scheint, das Drop-Down-Ding „Motor Output Mapping“ ist nicht mehr da. Gibt es einen anderen Weg, die Motoren anders zuzuweisen? Was ist Dein Rat?
Beste Grüsse aus der Schweiz.
Christian
Hallo Christian,
v2.0.0 ist eine sehr alte GUI. Das Feature ist glaube ich seit v2.0.8 implementiert.
Ich würde dir empfehlen, die neuste Version (2.0.15) zu installieren. Dazu bitte dann auch die aktuellste KISS FC V2 Firmware (1.3RC39b (BETA)) installieren und schon hast du das Drop-Down-Ding! 😉
Have fun!
Phil
Hey Phil erstmal gesagt: Fetter Blog!
Super ausführlich und alles was das Dronenherz begehrt ist hier zu finden!
Nun zu meiner Frage:
Ist es möglich die Adafruit LEDs auch mittels Kiss FC V2 zu betreiben wenn ein Mr Steele PDB benutzt wird?
Haste ne Idee wie das laufen könnte? Der Stecker ist ja quasi schon in Verwendung…
Gibt es andere alternativen… ? Inklusive Farbwechsel etc.
Liebe Grüße
Hey KwadLife,
Danke 🙂 ! Bei der KISS FC V2 gibt es ein eigenes LED-Pad. Schau mal auf meinem Anschlussplan.
https://blog.seidel-philipp.de/flyduino-kiss-fc-v2-anschlussplan-connection-plan/
Gruß,
Phil
Ah super, den hatte ich übersehen! Lieben Gruß
what about the esc telemetry. I can’t find any data anywhere about this. Everybody is presuming it is working but i have a batch ( 4esc) that show no telemetry data even with the 1.03 firmware….
Hi,
What do you mean?
KISS24A Telemetry -> KISS FC -> MinimOSD
or
KISS24A Telemetry -> KISS FC -> Smartport -> FrSky Taranis
Maybe i can do a howto on both of this. I saw both working. 😉
Greets,
Phil
Hallo Phil,
Thanks for your English translation of the many articles you have written. It has been very helpful.
I agree that the telemetry aspects are a bit of a black hole, indeed its one of the strengths of the system:
I have set mine up and it works: KISS ESC -> KISS FC -> Smartport ->Taranis, but I am not convinced of the accuracy.
http://kiss.flyduino.net/forums/topic/esc-mah-telemetry-accuracy/
Any thoughts?
Hey Johnny,
i never used this feature but indeed it would be nice, if there is a way to calibate the current sensors.
habe you set all ECS with the right telemetry setting? If one ESC which does not transmit the current you have 25% less current on the Telemety
Is there more work being done on the KISS manual? A few areas with very little information. Also towards the bottom it starts going back into German.
Hi Mike,
this is a german blog, so mainly it was created for my german readers because there is no german manual right now.
For some time, we translate our article into english.
Greets,
Phil