
Flyduino KISS FC Handbuch

![]()
![]()
Das KISS FC Handbuch
Inhaltsverzeichnis
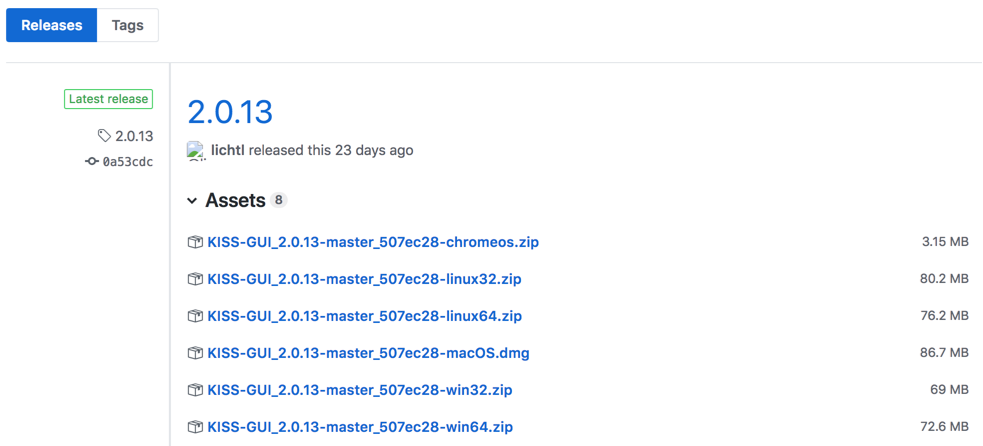
Installation der Standalone GUI
Die KISS standalone GUI steht für Windows, Mac, Linux sowie ChromeOS zum Download auf GitHub bereit.
Android-App
Ebenso gibt es eine Android App.
zum Download der Android App
Installation:
- .apk herunterladen
- Installation von unbekannten Quellen akzeptieren
- installieren
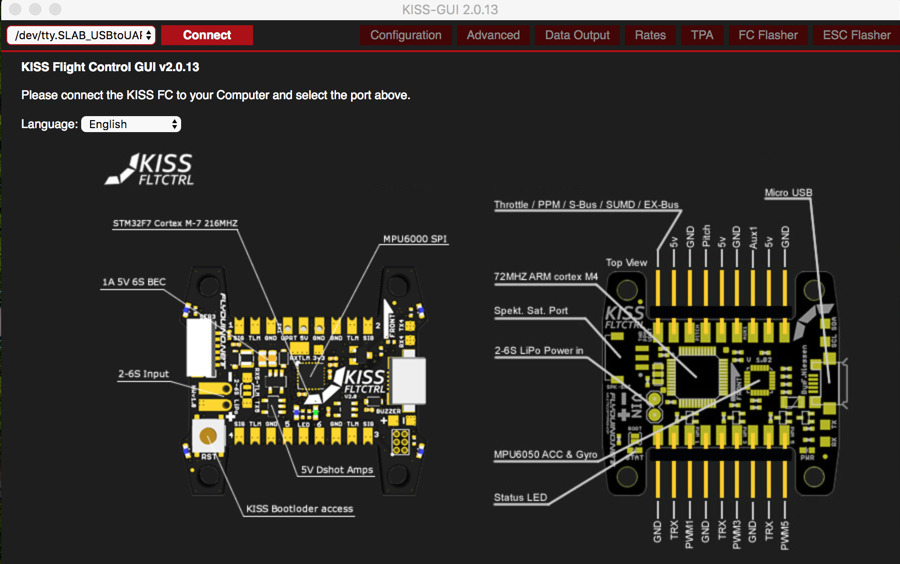
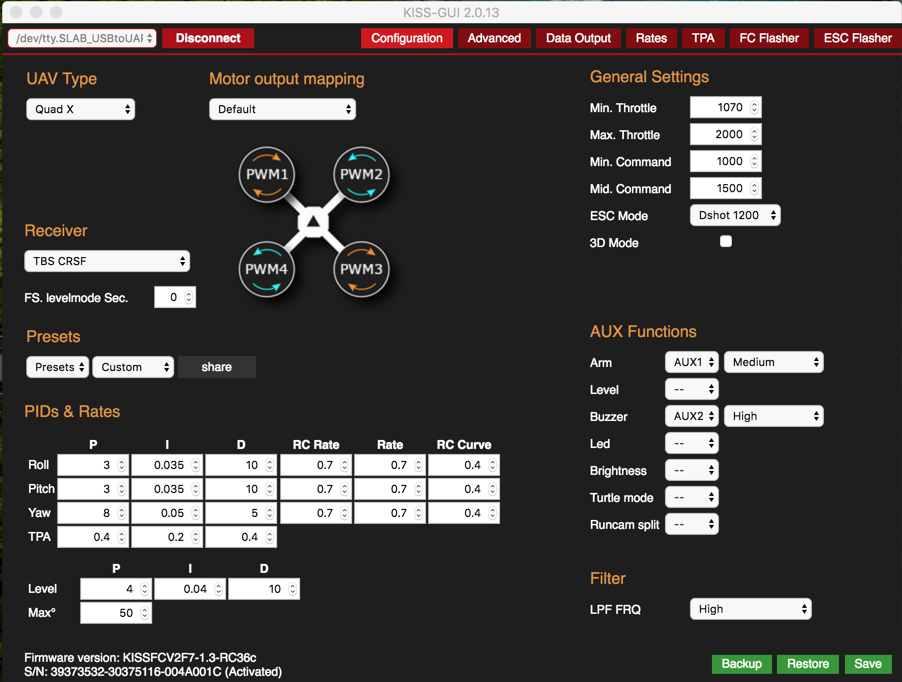
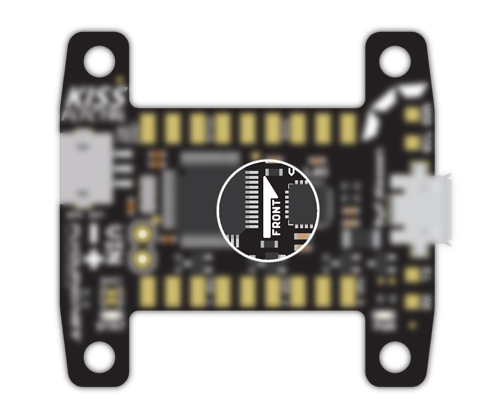
Startbildschirm
Dieses ist der Startbildschirm der auf allen Geräten gleich aussieht. In der Mitte findest du eine Darstellung beider Seiten des KISS FC und wie man die einzelnen Komponenten daran anzuschließen hat.
Sobald du deinen KISS FC per USB angeschlossen hast, erscheint oben links in dem Dropdown-Menü ein neuer Com-Port. Hier musst du den korrekten Port auswählen und auf „Connect“ klicken
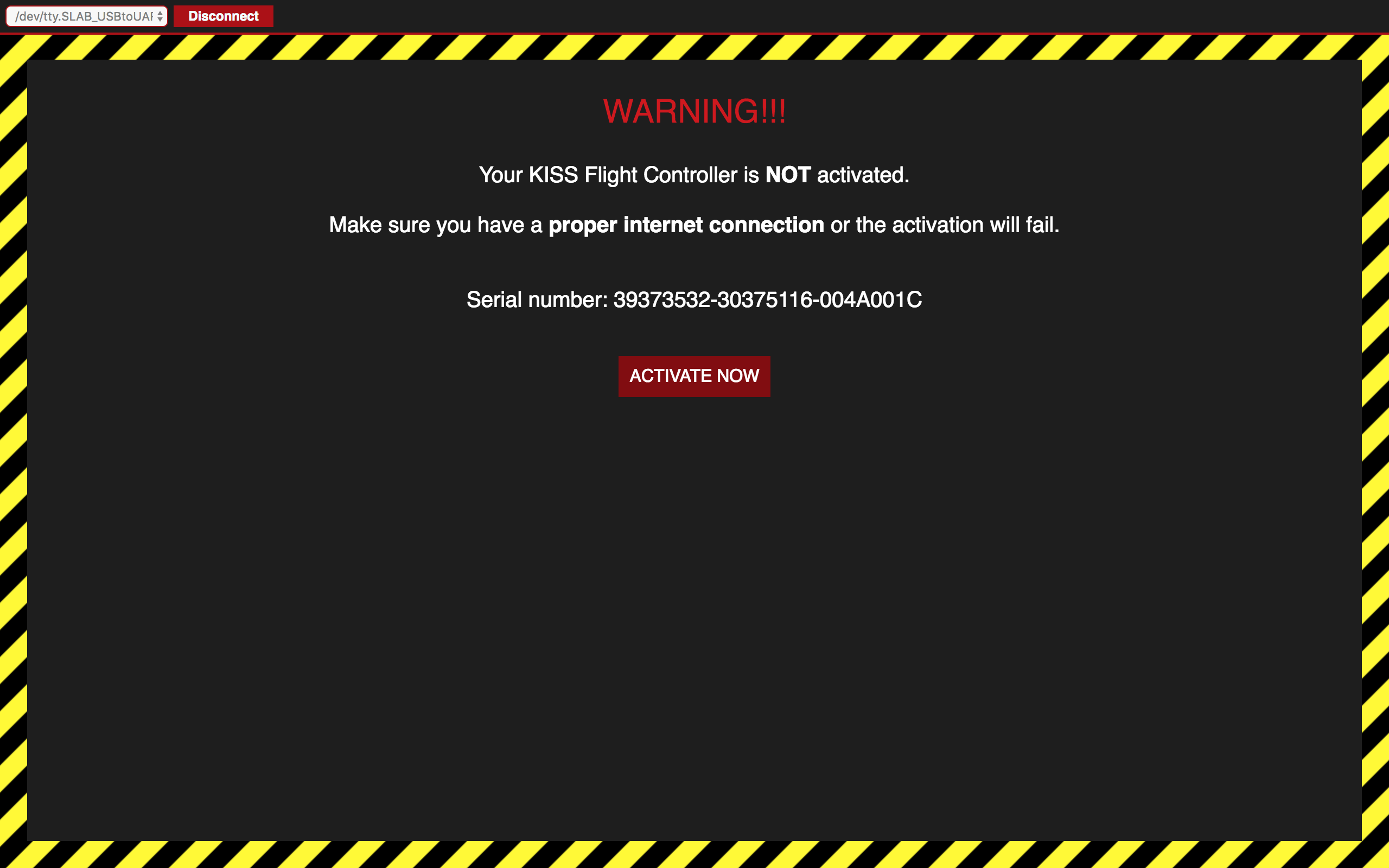
Aktivierung
Solltest du zum ersten Mal die FC mit der GUI verbinden oder eine neue Firmware geflasht haben, musst du sie aktivieren. Jede Flugsteuerung hat eine einzigartige Seriennummmer, welche mit der Datenbank von Flyduino abgeglichen werden muss. Du benötigst zwingend eine Internet-Verbindung.

Sollte der Aktivierungsprozess nicht funktionieren, wende dich bitte an Flyduino:
Tab: Configuration
Hier werden grundlegende Einstellungen für den Copter getätigt. Unter anderem ESC, Failsafe und Empfänger Einstellungen.
Übrigens, ganz unten findest du die aktuell installierte Firmware Version sowie die Seriennummer der Flugsteuerung.
Backup
Um ein Backup aller Einstellungen als Datei anlegen, klicke auf „Backup„. Mit „Restore“ kannst du ein Backup wiederherstellen. Über den Button „Save Settings“ speicherst du die getätigten Einstellungen.
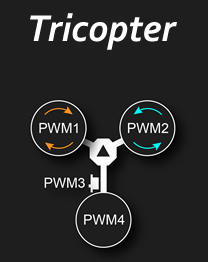
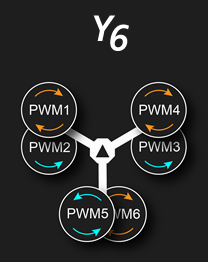
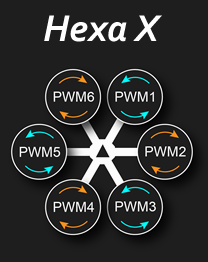
UAV Type
In diesem Menü legst du fest, welchen Typ von Copter du fliegen möchtest. Standard ist: Quad X
Achte bei der Montage der Motoren auf die Drehrichtung und den korrekten PWM-Ausgang. Außerdem ist darauf zu achten, dass die Flugsteuerung mit dem Flug-Richtungspfeil korrekt ausgerichtet ist. Einen Anschlussplan findest du hier:
- KISS FC V1 – Anschlussplan
- KISS FC V2 – Anschlussplan
- KISS FC V2 + WOLD PDB Anschlussplan
- iFlight KISS FC V1 Anschlussplan


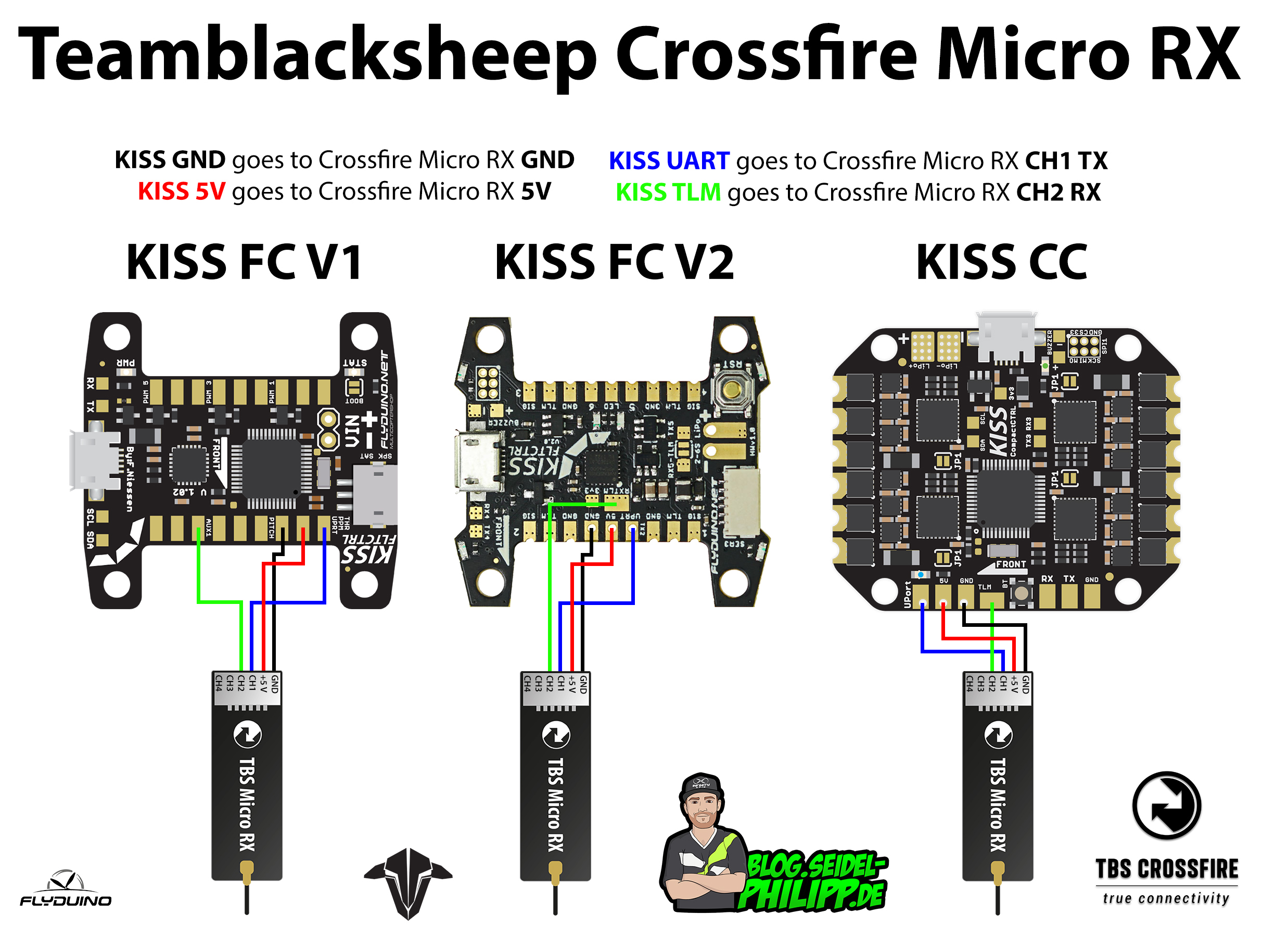
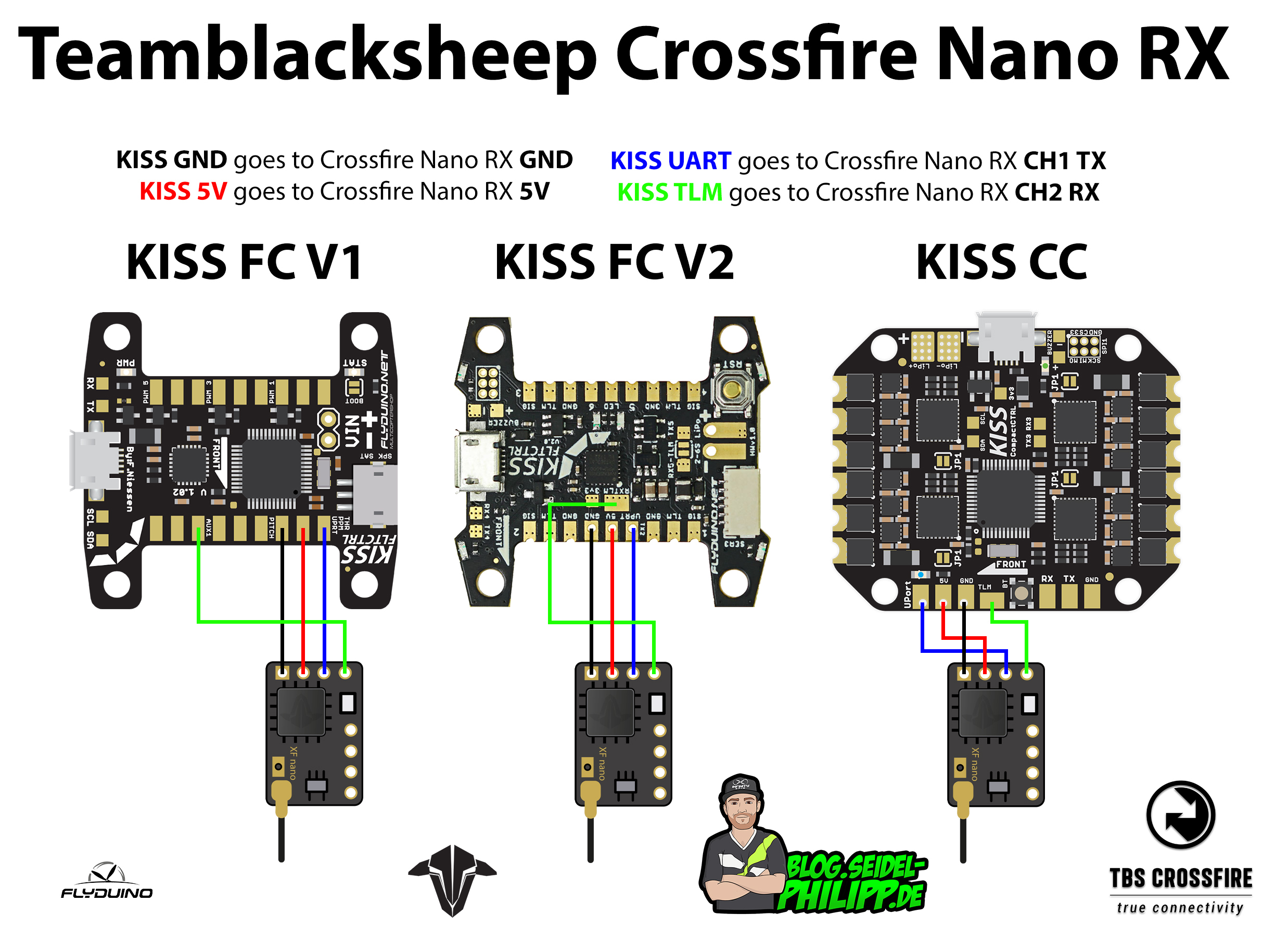
Receiver
Je nachdem, was für einen Empfänger du nutzt, kannst du in diesem Dropdown-Menü den passenden auswählen. PPM-Kanal-Reihenfolge findest du in allen Kombinationen.
- PPM: Thr, Roll, Pitch, Yaw
- PPM: Pitch, Thr., Roll, Yaw
- PPM: Thr, Pitch, Yaw, Roll
- PPM: Roll, Pitch, Yaw, Thr.
- PPM: Pitch, Roll, Thr., Yaw
- PPM: Roll, Pitch, Thr., Yaw
- Spekt. Sat. DSM2
- Spekt. Sat. DSMX
- FrSky S-BUS
- FrSky S-BUS (not inverted = nicht invertiert)
- Futaba S-Bus
- Gr. SUMD
- Jeti Ex Bus
- Multiplex SRXL
- JR XBus Mode B
- TBS CRSF
- FrSky F-Port
- FrSky F-Port (inverted)
PID & Rates
Hier kannst du wie gewohnt deine PIDs und Rates einstellen. Es gibt noch einen extra Reiter für Rates. Egal in welchen der zwei Menüs du die Rates änderst, sie sind an beiden Stellen gleich.
Presents
Flyduino hat eine Online Datenbank für User-PIDs erstellt. Über diese Datenbank kann jeder Nutzer seine PIDs mit der Community teilen und ggf. PIDs aus der Community direkt in den KISS FC laden.
General Settings
Min Throttle
minimaler Throttlewert für die Motoren
Max Throttle
maximaler Throttlewert für die Motoren
Min Command
der Throttlewert ab dem der PID Controller anfängt zu arbeiten
Mid Command
ESC Throttlewert für das Umschalten der Drehrichtung im 3D-Mode
ESC Mode
ESC Signal Protokoll auswählen: Oneshot42, Oneshot125, PWM, (Dshot150-1200 falls ESCs dies unterstützten)
3D Mode
Ist hier ein Hacken gesetzt, ist der 3D-Modus aktiviert, für diesen du natürlich noch ESCs mit aktiviertem 3D Mode benötigst.
ESCs kalibrieren
Alle KISS 32Bit ESCs / DSHOT müssen nicht kalibriert werden.
Diesen Prozess immer ohne Propeller durchführen!
- LiPo entfernen
- Klicke auf „Enable Motors Test“ im „Data Output“ Tab
- Wähle alle Motoren aus, deren ESCs kalibriert werden sollen
- Funke einschalten und 100% Gas geben (die Werte müssen 2000 betragen)
- LiPo verbinden und warten bis die Motoren piepen
- “Enable Motors Test” nun wieder deaktivieren
- LiPo und USB abschließen
- Funke ausschalten
Airmode
Um Airmode zu aktivieren: „Min Command“ auf 1000 stellen und Arming mit einem AUX-Kanal
AUX Functions
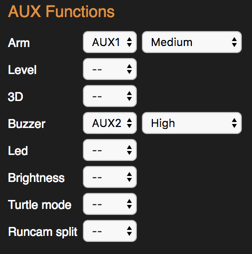
Hier kannst du bis zu vier AUX-Kanäle konfigurieren.
Es stehen folgende Ausweichmöglichkeiten zur Verfügung
- Arm – Arm/Disarm „Scharfstellen“
- Level – Angle/Level-Mode aktivieren
- 3D – 3D-Mode aktiviert
- Buzzer – Buzzer/„Sirene“ aktivieren (falls du zum Beispiel deinen Quad im hohen Gras suchst)
- Led – LED EIN/AUS/FARBE
- Brightness – Helligkeit der LEDs einstellen
- Turte Mode – Flippt den Copter, wenn er auf dem Kopf liegt
- Runcam Split – Steuert die RunCam Split / Split Mini
Jeder der oben aufgeführten Ausweichmöglichkeiten kann ein AUX-Kanal zugewiesen werden sowie ein Wert:
- Low + Medium (in der Nähe von 1000–1500)
- Medium (in der Nähe von 1500)
- Medium + High (in der Nähe von 1500–2000)
- High (in der Nähe von 2000)
- Knob (nur bei Led/Brightness)
Filter
LPF FRQ: Low Pass Filter / Tiefpassfilter gegen Oszillationen einstellen
- Off
- High (geringste Filterung)
- Medium High
- Medium
- Medium Low
- Low
- Very Low (höchste Filterung)
- Advanced Settings (Einstellungen über „Advanced Tab“ vornehmen)
Motor Output Mapping
Wenn du deine Motoren anders anordnen möchtest, kannst du die neue Anordnung in diesem Dropdown Menü einstellen.
Es stehen zur Verfügung:
- Default
- 90° CW
- 90° CCW
- 180° CW/CCW
- Upside-Down
- Upside-Down 90°CW
- Upside-Down 90° CCW
- Upside-Down 180°
Beachte: Wenn du die Motor Output Remapping verwendest und die FC zusätzlich drehst (z.B. KISS CC), musst du unter „Advanced“ ebenfalls die „Custom FC Orientation“ ändern.
Advanced
Hier kannst du weitere Einstellungen für deine KISS FC und Zubehör tätigen.
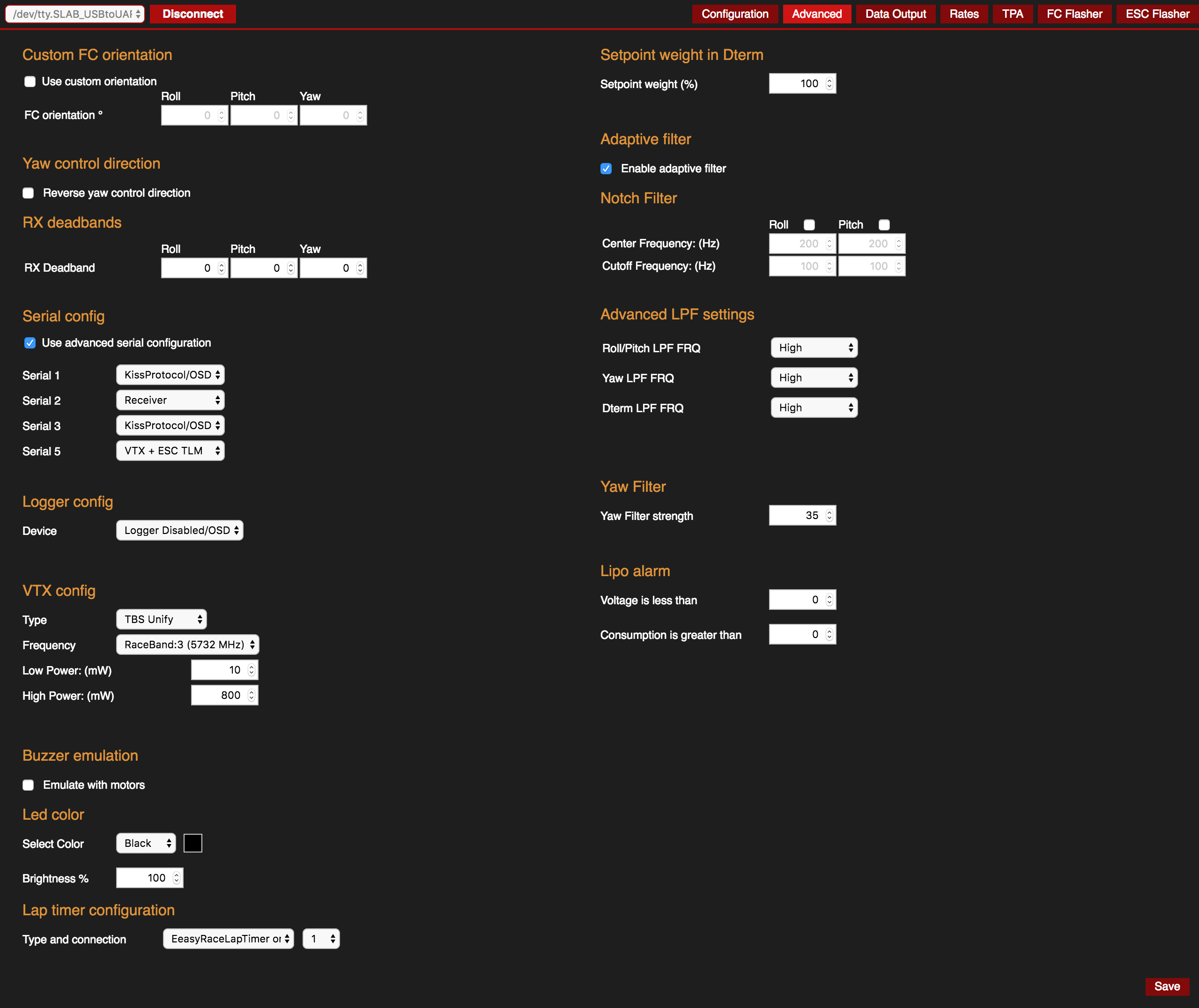
Custom FC orientation
Falls du deinen KISS FC nicht mit der Pfeilrichtung in Flugrichtung ausrichten möchtest, kannst du unter diesem Menü den KISS FC drehen. Du kannst auf jeder Achse einen positiven oder negativen Winkel angeben.
Negativ = links herumgedreht
Positiv = rechts herum gedreht
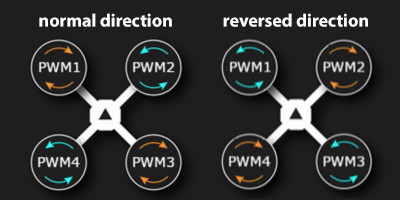
Yaw control direction
Möchtest du, dass die Propeller nach außen drehen, kannst du es über dieses Häkchen aktivieren.
RX deadbands
Einstellung in der FC-Firmware, die Steuerbefehle in der Nähe der Mittelstellung bis zu gewissen Maß als Mittelstellung interpretiert/“glättet“. Wird benötigt wenn die Fernsteuerung die Mittelstellung nicht immer genau treffen kann oder der Kanal „zittert“ (hin und her springt). Es könne Werte von 0 (keinen Einfluss) bis 250 (größtmöglicher Einfluss) eingegeben werden.
Serial Config
Unter „Serial Config“ mit dem Haken bei „Use advanced serial configuration“ kannst du den Seriellen Schnittstellen 1,2,3 und 5 individuelle Funktionen zuordnen.
Es stehen zur Auswahl:
- KissProtocol/OSD
- Logger
- Receiver
- VTX
- ESC TLM
- RunCam
- VTX+ESC TLM
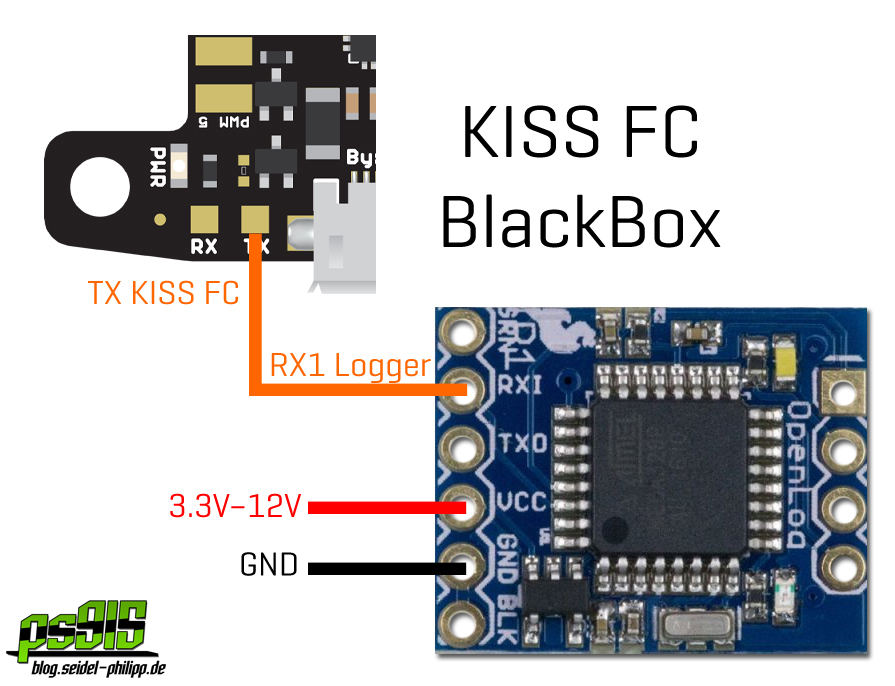
Logger Config
Wenn du einen seriellen Logger angeschlossen hast, kannst du ihn hier konfigurieren.
Folgende Daten können in einer Logfrequenz von 10-100% geloggt werden:
- Raw Gyroscope
- Raw Accelerometer
- ESC Voltage
- ESC Current
- ESC Temperature
- ESC RPMs
- ESC Consumption
Blackbox/ Logger Hardware: Flyduino (OpenLog) – KISS Black Box Firmware
Speichermedium: Es wird eine Class 10 MicroSD-Karte empfohlen
Log Viewer: Betaflight – Blackbox Explorer (Google Chrome Erweiterung)
VTX Config
Wenn du die Datenleitung deines VTX (z.B. TBS SmartAudio) an die Flugsteuerung angeschlossen hast, kannst du sie hier konfigurieren. Du kannst zwischen dem ImmersionRC Tramp / Furious FPV Stealth Race VTX oder dem TBS Unify Pro HV Race / TBS Unify Pro HV wählen.
Buzzer Emulation
Emuliert den Buzzer Sound über die Motoren/Propeller.
LED Color
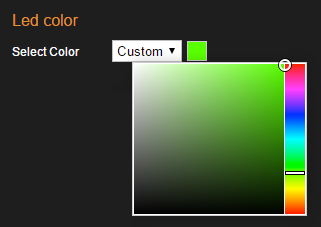
Es können folgende Farben ausgewählt werden.
Black, White, Yellow, Orange, Red, Purple, Blue, Green, Cyan, Custom
Die LED wird wie folgt angeschlossen.
Es wird empfohlen eine externe und ausreichend dimensionierte 5-V-Spannungsquelle zu wählen.
Lap timer configuration
Mit einer IR-LED und einem 30-Ohm-Widerstand kannst du den EasyRaceLapTimer benutzen.
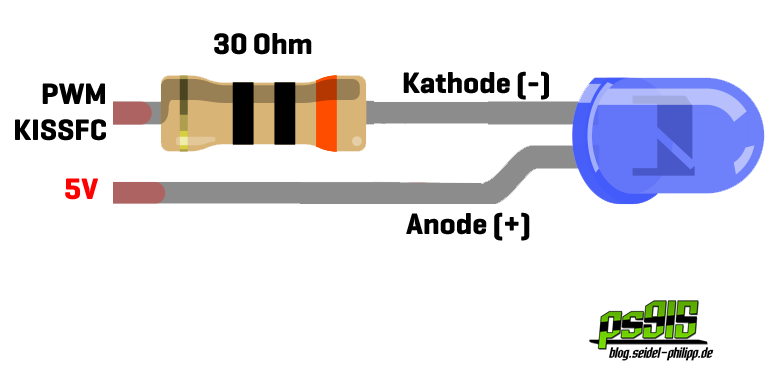
Es können folgenden Ausgänge genutzt werden: Buzzer Pin, PWM5 Pin, PWM6 Pin
Setpoint Weight in Dterm
Setzt „Setpoint Weight“ in Prozent.
Ändert die Reaktions-Empfindlichkeit deines Copters. 100% fühlt sich sehr direkt an. 0% fühlt sich „smoother“ an.
Adaptive Filter
Aktiviert den „Adaptive Filter“ von Kiss.
Der „Adaptive Filter“ (programmiert von Alexander Fedorov) filtert Gyro Vibrationen heraus bevor sie in den „Pid Loop“ gelangen. Je nach Frequenz wird die Berechnung angepasst.
Übrigens: Auf der KISS FC V2 läuft der Filter 12x schneller und filtert „aggressiver“ als auf der KISS FC V1.
Beachte: Der „Adaptive Filter“ ist nur verfügbar wenn eine Looptime von 1kHz ausgewählt ist.
Notch Filter
Der Notch Filter wird nur benötigt, um einen bestimmten kleinen Bereich von Frequenzen zu filtern, in dem Vibrationen auftreten können.
Bitte nur aktivieren, wenn der Filter mit Hilfe der Blackbox eingestellt wird.
Center frequency: Ist die Mitte des Bereichs, um den gefiltert wird
Cutoff frequency: bestimmt den Frequenzbereich über und unter „Center frequency“
Beispiel
center = mittlere Frequenz (z.B 400Hz)
cutoff = kleinste Frequenz (z.B 300Hz)
gefilterter Bereich = kleinste Frequenz bis center − lowest + center
gefilterter Bereich = 300 bis (400 − 300) + 400 = 500, der Bereich ist also 300 − 500Hz
Advanced LPF settings
Erweiterte Einstellungen des Low Pass Filters / Tiefpassfilter.
Yaw Filter
YAW filter strength bestimmt die Einflussgröße, die der Filter auf die YAW-Achse hat.
Dieser Filter kann helfen, das „grinding noises“ auf manchen Setups entgegen zu wirken
Er ist unabhängig von dem Notch Filter.
Bei 0 ist der Filter aus. Das Filter wirkt exponentiell, also je höher, desto mehr Filterung.
Beispiel
Setzt man ein Filter von 92% bis 97% wird mehr filtern als wenn man 50% bis 60% einstellt
Formel dahinter: Mix value = old value x (0%) + new value x (100-0%)
LiPo-Alarm
LiPo-Warnung bei Unterschreitung der eingestellte Grenze. Einstellbarer Bereich beträgt 0–26 V.
Tab: Data Output
Unter „Data Output“ kannst du verschiedene Sensoren und Infos einsehen wie zum Beispiel die LiPo-Spannung, Auslastung der MCU, Arming Status und vieles mehr.
{kind=link}
„Mode“ zeigt den aktuellen Flugmodus an.
„Status“ zeigt an, ob das Modell „gearmt“ oder „disarmed“ ist.
Calibrate Accelerometer
Button zum kalibrieren des Beschleunigungssensor
Receiver
Hier kannst du prüfen, ob deine Kanäle korrekt zugeordnet sind und die Stickwege korrekt arbeiten. Ebenso, kannst du hier sehen, ob deine Stickmitten korrekt auf 1500us eingestellt sind. Wenn nicht, kannst du diese per Subtrim in deiner Funke einstellen.
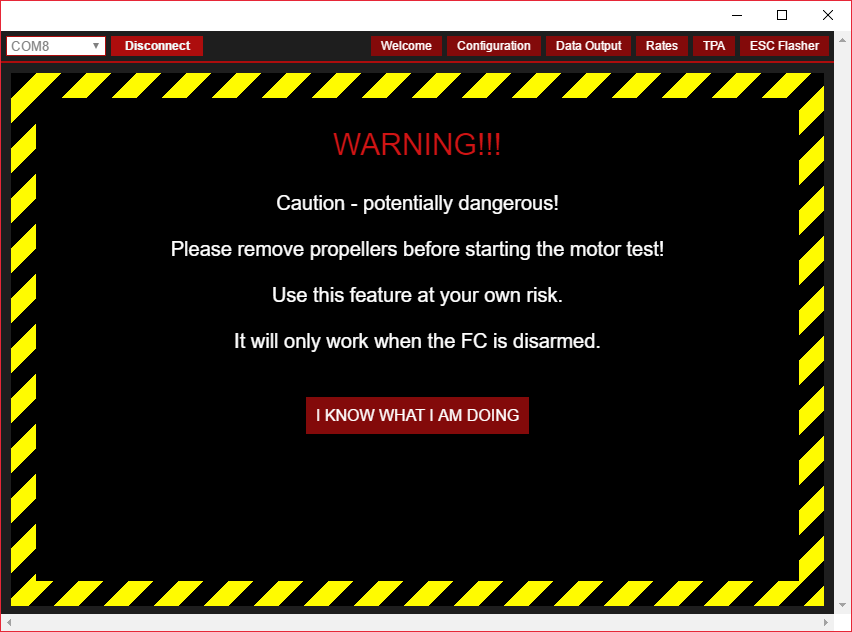
Motor Test
In den „Motor Test“ gelangst du, indem du unter „Motors“ auf „Test“ klickst.
Achtung: Immer die Propeller entfernen, wenn du mit einem eingesteckten LiPo an der Flugsteuerung arbeitest.
Tab: Rates
In diesem Fenster kannst du deine Rates einstellen und auch gleich testen. Es wird dir außerdem auf jeder Achse die aktuelle Anzahl an Flips, Rolls oder Turns angezeigt.
Tab: TPA
In diesem Menü kannst du deine PIDs automatisch in Abhängigkeit deines Gaswert anpassen lassen (erhöhen/verringern). Dies wird oft verwendet, wenn du bei Vollgas Oszillationen hast. Mit der Verwendung von TPA brauchst du deine PIDs also nicht verändern um den Oszillationen entgegen zu wirken.
Es gibt 4 Punkte, an denen du deine PIDs automatisch anpasse lassen kannst.
- Startpunkt bei 0% Gas und 30% TPA
- individueller Breakpoint 1 (hier 30% Gas und 0% TPA)
- individueller Breakpoint 2 (hier 50% Gas und 0% TPA)
- Endpunkt bei 100% Gas und 100% TPA
Tab: ESC Flasher
In diesem Tab werden ESCs geflasht und konfiguriert!
ESCs flashen
Du benötigst ESCs mit mindestens der Version 1.02 (Tutorial), um dieses Feature nutzen zu können. Zum flashen muss ein LiPo angeschlossen werden.
Auch hier gilt unbedingt: Propeller ab!
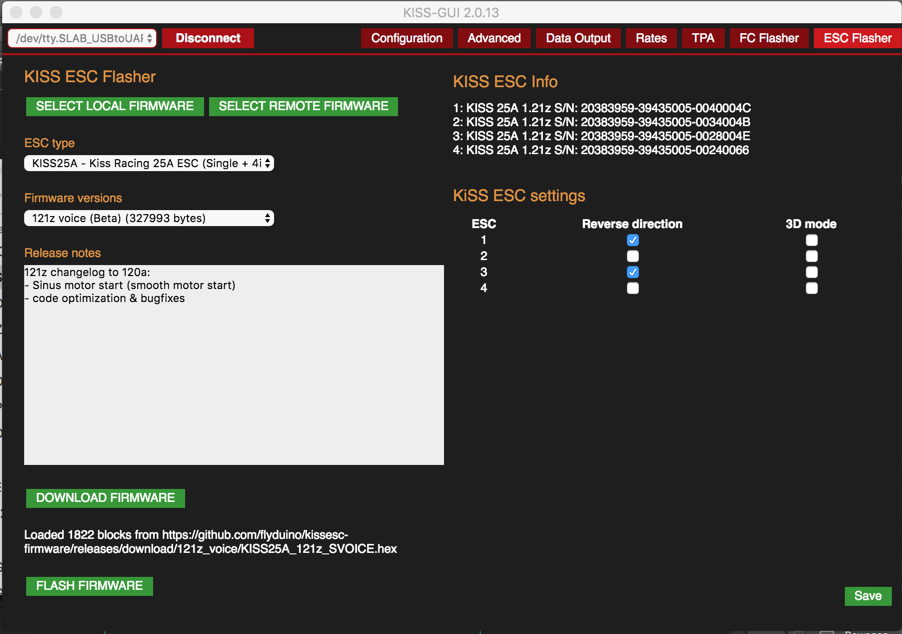
Nach dem Klick auf „SELECT REMOTE FIRMWARE“ erscheint ein Dropdown Menu in dem man die gewünschte Firmware auswählen kann. Zum fortfahren drücke auf „DOWNLOAD“ und anschließend auf „FLASH FIRMWARE„.
Alternativ kann man mit „SELECT LOCAL FIRMWARE“ eine Firmware-Datei von deinem Computer auswählen und hochladen. Du findest sie zum Download hier.
KISS ESCs konfigurieren
Unter „KISS ESC Info“ werden alle ESCs mit der dazugehörigen Seriennummer und Firmware-Version aufgelistet.
Drehrichtung des Motors oder 3D Mode wird unter „KISS ESC settings“ eingestellt.
Ich hoffe dir hat mein KISS FC Handbuch gefallen und du empfiehlst es gerne weiter. Falls du Fragen hast, zögere nicht, diese in den Kommentaren weiter unten zu stellen.

Hey Philipp ,
habe beim ersten Testflug gemerkt, das ich keine Fips machen kann….- als wäre der Level-Mode aktiviert…woran kann das liegen?
Hey,
stell mal „Min Command“ auf 1000 und schau mal unter „AUX Functions“, dass „LEVEL“ nicht aktiviert ist.
Gruß,
Phil
Guten Tag,
kann das sein das der KISS CC nicht gedreht werden kann ? Kann beim motor mapping nichts umstellen aber der fc lässt sich drehen…
Hallo,
ich hätte eine frage, ich möchte meinen Racer auf 3d umstellen zum probieren, brauch ich bei den KISS ESC´s (24A) nur die Häkchen setzen für 3d mode bei den ESC´s und auf den KISS FC auch die häkchensetzen für 3d oder muss ich noch etwas anderes tun zB. ESC Flashen??
Vielen dank für deine Beiträge,
Mfg
Hi Christian,
nein, es reicht eigentlich aus beides auf 3D zu setzen und 3D Propeller zu montieren.
Gruß,
Phil
Hey Philipp,
ich bin noch neu in der KissWelt und habe aktuell das Problem, dass ich beim Motormapping nichts umstellen kann.
Das Dropdown-Menu ist zwar da, aber ausgegraut.
Verbaut ist der Kiss 4in1 ESC 32bit und der Kiss FC V2.
Hast du vielleicht eine Idee woran es liegen könnte?
Beste Grüße
Moritz
Hey Moritz,
sorry für die späte Antwort. Welche Firmware verwendest du auf der KISS FC und dem ESC?
Gruß,
Phil
Hallo
hatte dich vor ein paar Tagen angeschrieben wegen dem Tri copter , scheinbar hattest du die Frage weitergeleitet aber ich habe leider nicht die Antwort bekommen die ich suchte und auf die unten stehenden Zeilen habe ich bis jetzt gar keine Antwort bekommen ?
Kannst du mir helfen ?
Danke und Grüße Thomas
—————————————————————————————————————————————–
Hallo
Danke für die Antwort aber das war nicht meine Frage.
An PWM 3 kommt das Heckservo aber wie ist die PIN Belegung ?
GND ist Masse
TLM ist ?
SIG ist ?
Was ist Plus und was ist Impuls ?
Das ist mein Problem.
Ich habe mir extra einen deutschen Hersteller gekauft in der Hoffnung da einen ordentlichen Support zu haben aber jedes Mal wenn ich dort anrufe geht keiner dran.
Hast du eine Möglichkeit oder Telefonnummer wo man da einen erreichen kann ?
Vielen Dank und Grüße
Thomas
Hallo! Hab ne Frage zu den VTX Einstellungen. Nutzte einen Unify Pro Race und ist alles angeschlossen und Channal umschalten geht auch super. Aber bei den Power-Settings bin ich mir etwas unsicher. Weil man bekommt ja kein Feedback über die Led am VTX.
Habe bei Low Power 25 und bei High Power 200, denn low soll ja angeblich bei unarmed und High bei armed sein. Aber kann ich da auch irgend ne andere Zahl eingeben? Zb 5 bei low und dann geht er auf 5mW runter ?
Sollte ich eine Rückmeldung bekommen ob es geht?
Hey kleinMax,
du bekommst eine Rückmeldung, du musst halt darauf vertrauen. Du kannst es aber per PowerMeter prüfen (habe ich gemacht und es klappt). Solange du Kanäle umschalten kannst, wir auch das Powersetting funktionieren.
Zu dem Unify: Dort kannst du nicht auf 5mW stellen. Der Unify unterstützt nur die Stufen 25mW, 200mW, 500mW und 800mW.
Wenn du einen ImmersionRC Tramp hast, kannst du auf 1mW genau einstellen.
Gruß,
Phil
Hallo
möchte die Kiss V2 als Tricopter benutzen und will das Heckservo anschließen. Ich weiß es kommt an Port 3 aber wie ist die Pin Belegung Masse ist klar aber + und Impuls wo ?
Grüße Thomas
Ps. mein erster Tricopter komme aus der Heli Abteilung.
Hallo Phillipp, ich habe da mal zwei Fragen.
Ich habe das steele PDB mit Kiss fc v2, 32A ESC, RC split 2 und frsky r-xsr Empfänger.
Nun wollte ich mal fragen wie ich den Frsky Variometer (vari-H) anschließe damit ich in der Funke (taranis x9d +) die Höhe angesagt bekomme. Der vari-H kann ja kein F-port und der r-xsr hat nur eine Anschlussbuchse.
Und ist es evtl möglich im OSD die Höhe angezeigt zu bekommen?
MfG
Tukaram
Hey Tukaram,
S.Port ist „Dasy Chain“ fährig. Du kannst es also einfach parallel anschließen. Die Sensoren in der Telemetry erweitern sich dann einfach je nachdem wie viel und welche Sensoren du in die Kette (Chain) hängst. Deswegen haben die meisten Sensoren einen S.Port In und Out Port.
Gruß,
Phil
Hallo Phillip,
Ich habe einen extra Pieper (DroneKeeper) und den würde ich gern mit der KissFC verbinden.
Wie/Wo ist es möglich einen schaltbaren Kanal an der KissFC ab zugreifen?
Wenn ich keiner extra LED’s habe, könnte ich dann eventuell einfach an den Signalausgang für die LED’s?
hi. bin am verzweifeln, fliege schon lange kiss und bin voll zufrieden, bis 1.3. Wenn ich 1.3 drauf flashen erkennt er meinen Empfänger nicht mehr (Jeti). 1.2 und alle älteren Versionen waren kein Problem. Ist das ein Bug?
Hey David,
nach Rücksprache mit Flyduino wird es wohl ein Bug sein. Am Jeti Protokoll selber wurde nichts geändert, aber viel an den seriellen Schnittstellen aufgrund der Implementierung von SmartAudio. Die 1.3er ist ja noch im Betastadium und kann Fehler beinhalten. In deinem Fall musst du auf 1.2 zurück gehen und warten, bis die 1.3er stable wird. Wenn du dann immer noch Probleme mit dem Jeti Protokoll hast, melde dich nochmal.
Gruß,
Phil
Hi Phil. Sowas hab ich mir schon gedacht. Weiß man schon wann eine neue version kommen soll?
Nein, ein genaues Datum gibts noch nicht, wir sind gerade noch in der Testphase!
Gruß,
Phil
Hi Phillip!
Hab jetzt zum ersten mal ne Kiss verbaut und wollte die neusten FW 1.3 drauf ziehen, hab ich auch gemacht nur komm ich nicht in die GUI um sie zu aktivieren! Hab jetzt die 1.2 drauf gemacht dann ging es! Wieso funzt das nicht mit der 1.3???
Hey Jerome,
für 1.3 benötigst du eine spezielle GUI Version für Chrome, die in jedem Bundle enthalten ist.
http://kiss.flyduino.net/downloads/
Hier die Übersicht:
Firmware v1.3-R10beta für FC und CC benötigt die Chrome GUI v1.16.4
Firmware 1.2 für KISS FC, CC und AIO benötigt die Chrome GUI v1.15.6
Leider ist das sehr verwirrend, und Flyduino hat es immer noch nicht geschafft eine vernünftige GUI mit Dropdownmenü für Firmwares, Warnungen bei falschem GUI usw fertig gebracht.
Schöne Grüße,
Phil
PS: lass Mal hören ob/wenn es geklappt hat.
Ok cool so hab ich mir es fast gedacht hab ja im Bündel die GUI Version gesehen! Und nach welcher Reihenfolge mach ich das jetzt zieh ich die GUI Version auch mit auf die Kiss oder wie erneuer ich 1.15.6 Version in meinem Chrom Browser! Vielleicht kannst du mir noch mal kurz die Reihenfolge erklären wäre ganz nett, sorry Kiss ist neu für mich!!! Besten Dank für das…
Jo hat geklappt!!! Musste die alte GUI löschen im Browser oben rechts auf weitere Tools, Erweiterung, Erweiterungen entpacken einfügen das war’s! Jetzt läuft sie auf 1.16.4 und die Kiss auf der neuen 1.3, eigentlich ganz einfach wenn man n Plan hat! Den hatte ich leider nicht deswegen war’s n Kampf aber alles cool, Danke noch mal!!!
Gruß Jerome
Hallo Phillip,
erstmal danke für die super Übersicht!
Wenn mein quad schnell sinken soll, regelt mein kissfc immer irgendwas und es fängt an zu schaukeln, woran könnte das liegen?
Viele Grüße Lelo
Könnte sein, dass dein Min-Throttle zu gering ist? Hast du Airmode eingeschaltet?
Werde ich beides checken, Danke!
Hallo Philipp
Weisst du welche RGB LEDs vom KISS FC unterstützt werden?
Ich habe an den RGB-LED Signalpin 3 Neopixel (https://www.adafruit.com/product/1260) angeschlossen mit externer Speisung.
Die LEDs blinken, bei fest eingestelltem Farbwert (wie von dir beschrieben übers GUI), unregelmässig und in verschiedenen Farbtönen (konnte noch kein Schema feststellen).
Vielen Dank und Gruss
Hey Peter,
es können alle WS2812 LEDs gesteuert werden. Die Adafruit LED ist auch so eine, aber es kann sein, dass sie dort am Protokoll etwas geändert haben.
Als erstes würde ich versuchen, die Spannung zu filtern bzw nach dieser Anleitung vorgehen, dort habe ich das Problem mit wild flackernden LEDS schon beschrieben:
http://blog.seidel-philipp.de/anleitung-cleanflight-ws2812-rgb-led-anschliessen-und-konfigurieren/#LEDs_flackern_Abhilfe_mit_Spannungswandler_anstatt_5V_BEC
Wenn das nicht hilft musst du dir andere LEDS zulegen, und zwar die WS2812
Ich hoffe ich konnte helfen. Würde mich über ein Feedback freuen!
Gruß,
Phil
Super besten Dank für deine schnelle Antwort. Werde mir die Anleitung anschauen und mir auch ein paar LEDs aus dem Chinashop besorgen. Rückmeldung folgt
Gruss
Peter
Hallo,
leider kann ich über meine Funke (Taranis Q X7) nicht armen. Über das Kiss GUI reagiert sie aber (Motortest).
Was habe ich übersehen.
Vielen Dank im Voraus.
Hey Petr,
steht der Quad still? Acc mal kalibriert? Passen die AUX Einstellungen?
Gruß,
Phil
Kann beides mit Ja beantworten 😉
Hallo Phil,
hat an meiner Dummheit gelegen. AUX war auf der Funke nicht eingerichtet. Sorry!
Hey Philipp,
ich habe hier noch einen Frame mit einem Emax 4in1 (25a) ESC liegen, siehst du irgendwelche Probleme beim verbinden der beiden?