
3D fliegen mit Cleanflight/Betaflight – Einstellungen und Setup

In dieser kurzen Anleitung geht es darum einen Copter für den 3D Flug zu konfigurieren. Diese Anleitung wurde ursprünglich von Gregor, einem FPV-Kollegen, verfasst. Ich habe die Anleitung in einigen Passagen ergänzt oder anders formuliert und einige Bilder hinzugefügt, sodass sie zu den Rest meiner Artikel passt. Der Dank für diese Anleitung gebührt aber Gregor. 😉
Inhaltsverzeichnis
Voraussetzungen
- deine ESCs müssen die BLHeli Firmware haben (Anleitung zum flashen von BLHeli auf einen ESC)
- BLHeli Bootloader ist von Vorteil (Anleitung)
- 3D Propeller (z.B HQProp 3D-5045O)
- neuste Cleanflight/Betaflight
- BLHeli Suite
Einstellungen ESCs
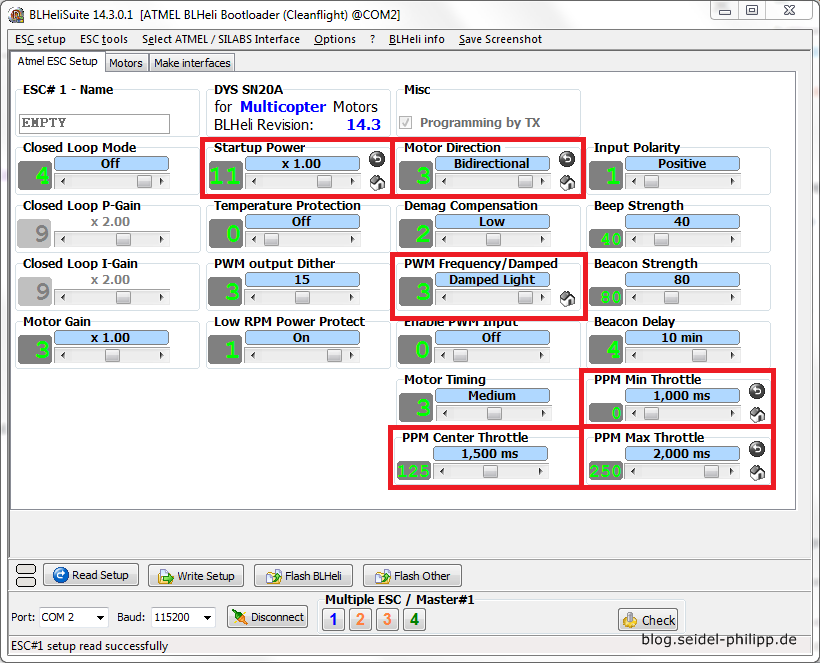
- Bei allen ESCs Motordrehrichtung auf Bidirectional stellen (Hierbei musst du aber beachten dass die Motoren in der richtigen Drehrichtung angelötet sind)
- PPM Center Throttle auf 1,500ms
- PPM Min Throttle auf 1,000ms
- PPM Max Throttle auf 2,000ms
- Startup Power auf x1.00
- PWM Frequency/Damped auf Damped Light
Betaflight flashen
Flash die neuste Betaflight Version auf deine Flugsteuerung. Hier eine Anleitung zum flashen einer Firmware mit einer .hex Datei.
Einstellungen Cleanflight
Damit du 3D fliegen kannst, muss auf jeden Fall noch die Flugsteuerung korrekt konfiguriert werden.
Für Betaflight kannst du dich auch an diese Anleitung halten, solltest aber falls etwas nicht funktioniert auf die Betaflight Anleitung für 3D Flug zurückgreifen.
Tab Configuration
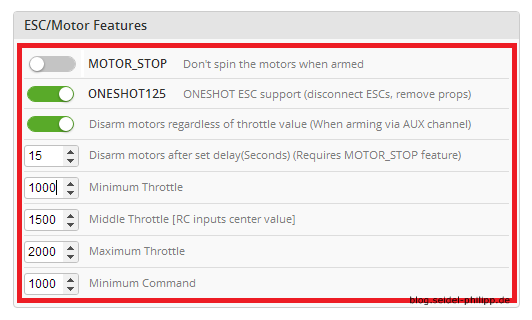
- Motorstopp deaktivieren
- Oneshot125 aktivieren
- den Schalter darunter auch auf ein
- Minimum Throttle auf 1000
- Middle Throttle auf 1500
- Maximum Throttle auf 2000
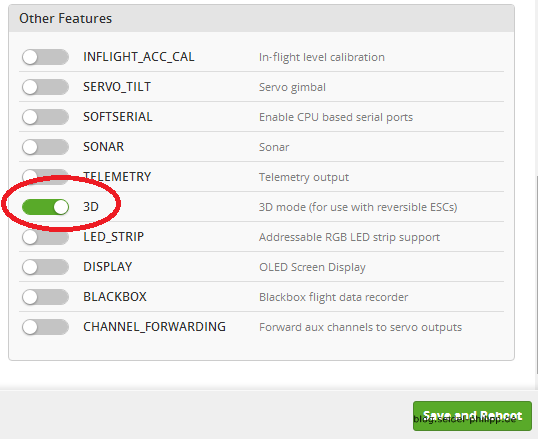
- Weiter unten auf der Seite in der Box „Other Features“ den Schalter 3D aktivieren
- Save and Reboot drücken nicht vergessen

Tab PID Tuning
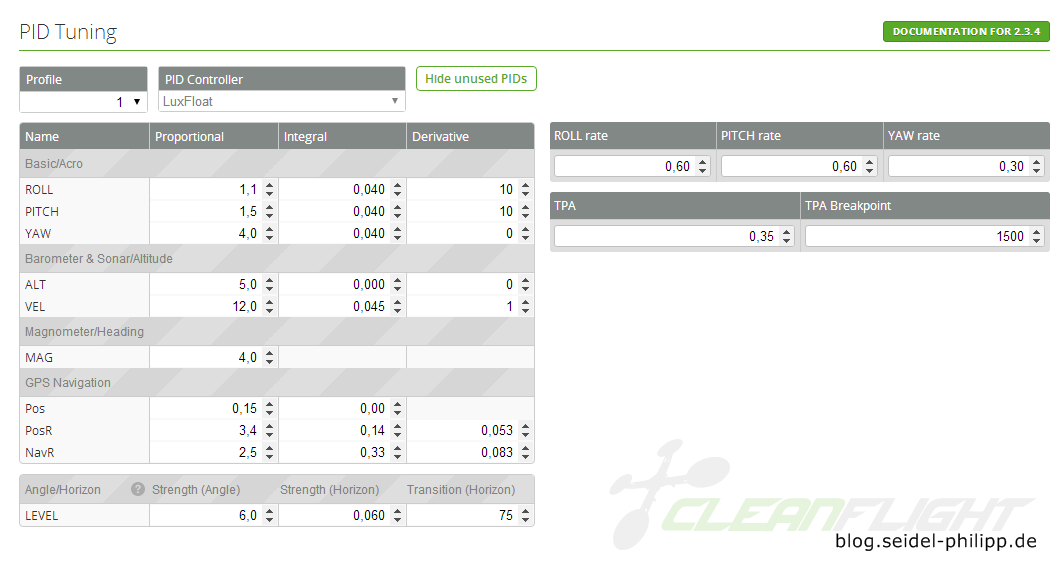
Luxfloat Controller wählen (bleibt dir überlassen)
- Standard PIDS oder nach belieben anpassen
- Rates wie im Bild oder nicht ganz so hoch: 0.5/0.5/0.3/0.35.
- auf Save drücken nicht vergessen
Tab Receiver
Per Subtrim die Funke sauber auf 1000, 1500 und 2000 einstellen. (In meinem Handbuch nachzulesen)
Throttle Expo nach belieben einstellen.
Tab Modes
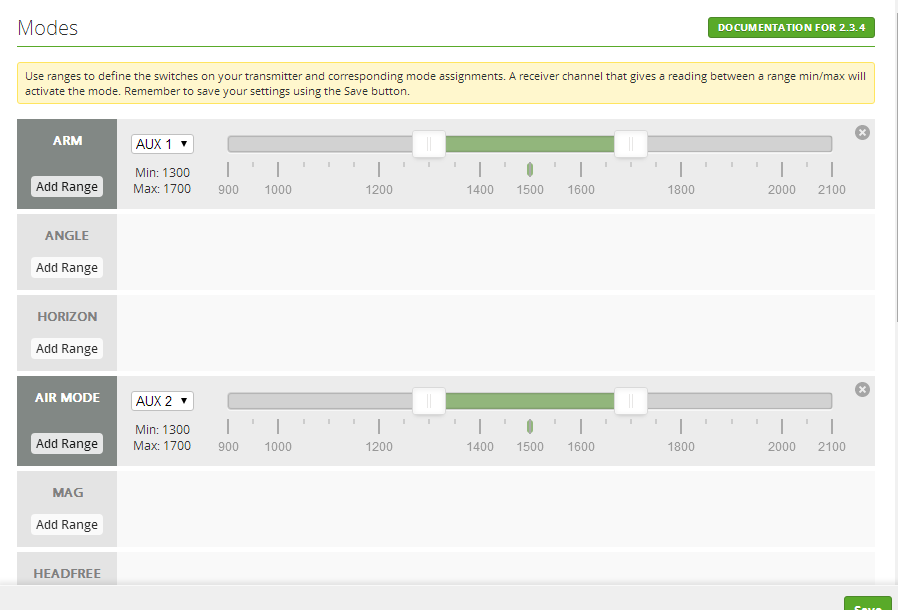
Wichtig: Du musst über einen Kanal „Arm“ schalten können, da wir vorher die Option im Tab Configuration gesetzte haben.
Der Rest bleibt dir überlassen. Du kannst Acro fliegen, oder auch in anderen Flugmodi.
Außerdem könntest du auch nur einen Schalter belegen. Zum Beispiel einen 3-Wege Schalter mit:
- „Disarm“
- Arm + „Acro“
- Arm + „Acro“ + Airmode
„Acro“ ist in Anführungszeichen, da wenn kein anderer Flugmodi aktiv ist, automatisch Acro aktiv ist. Genauso „Disarm“
Tab CLI
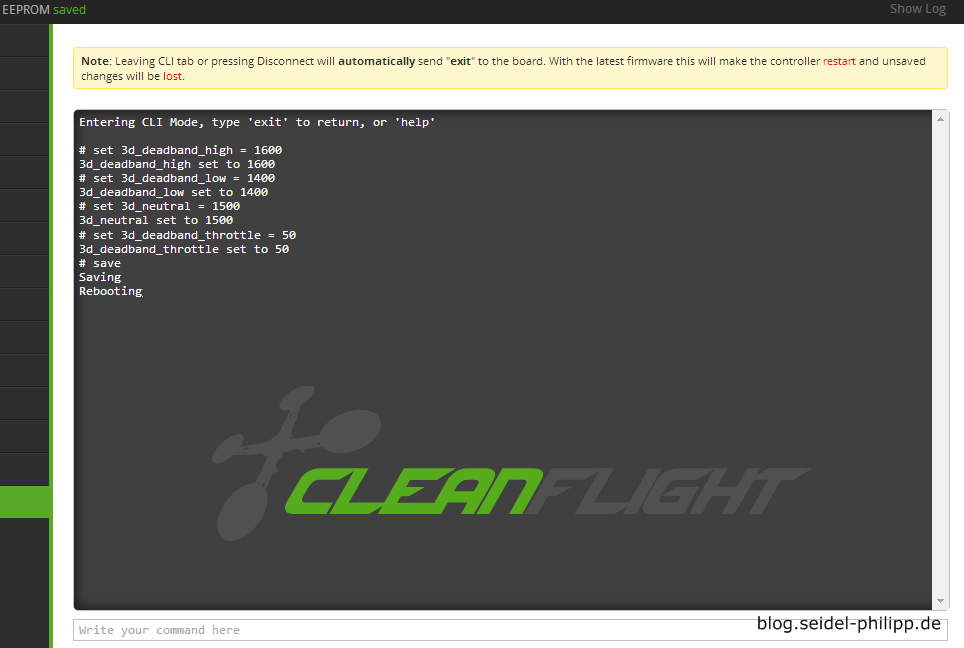
Zu guter Letzt musst du noch ein paar Befehle in die CLI hämmern:
- set 3d_deadband_high = 1600 ENTER drücken
- set 3d_deadband_low = 1400 ENTER drücken
- set 3d_neutral = 1500 ENTER drücken
- set 3d_deadband_throttle = 50 ENTER drücken
- save ENTER drücken
Die Flugsteuerung startet neu. Fertig.
Noch ein paar Tipps:
Gregor: Ihr schaltet eure Funke ein und last den Gas stick erstmals unten. Dann drückt ihr den arm Schalter und zieht den Gas stick zur Mitte und die Motoren laufen erst mal bei 1400 reversed an und schalten dann bei 1600 auf aufwärts.
Ihr könnt aber auch den stick gleich in der Mitte lassen und dann armen dann laufen die Motoren auch gleich an was mir aber gefährlicher erscheint.
Ich hab mir bei meiner funke bei 1600 einen Piepton erstellt um zu wissen das ich knapp vor dem Punkt bin wo die esc umschalten.
Wichtig ist auch das Ihr richtige 3D Propeller benutzt . 5045. Die richtige Motorisierung dafür ist ein Motor mit ca. 2000 KV
So ich hoffe euch damit ein wenig geholfen zu haben und wünsche euch viel Spaß beim Propellerwechsel…. ……alle 3 Sekunden. 😛
Hallo,
ich suche 3D bidirektionale ESC 15 – 20 A ohne BEC .
Gibt es auch ein 4 in 1 schon als 3D bidirektional tauglich?
Für BLHeliSuite.
Gruss
Claus
Hey,
ja alle BLHeli ESCs sind 3D fähig. Dazu einfach per Software auf 3D umstellen. Hier ein passender 4in1 ESC.
Gruß,
Phil
Hi
Geht das ganze auch als reverse?
Grüße
Hallo
Was muß ich bei den Motoren beachten ? Ich frage weil die Motoren ja schnell die Drehrichtung wechseln müssen. Sollten die Motoren extra leicht sein oderso ? Habt Ihr eine Empfehlung für mich ?
Gruß Thomas
Hallo
kann ich das 3D Fliegen auch in Betaflight mit BLHeli_S und Multishot Reglern machen ?
Gruß Thomas
Hey Thomas,
ja das klappt. Cleanflight ist nicht mehr aktuell, aber ist im Prinzip der Vorgänger von Betaflight!
Gruß,
Phil
Hi Philipp,
mein Kopter fliegt mittlerweile gerade, leider fängt er dann auf der YAW Achse immer schneller zu drehen an…bis zur vollgas drehung??? Hast du ne Ahnung woran das liegen könnte?
Neuste ESC FW geflashed und fühlt sich ohne props auch ganz ok an – jede achse reagiert einigermaßen so wie sie soll (und ich das bewerten kann) zumal die Motoren ohne Props ja eh wild ins leere laufen.
Verzweiflung: Habe alle Einstellungen der PS Anleitung umgesetzt und folgendes Phänomen: Nach ESC nitialisierung bei Akku anstecken laufen alle Motoren mit low rpm vorwärts, und das auch im Zustand DISARMED oder FAILSAFE (kill switch). Die ranges der ESCs (1000…2000) scheinen sich nicht mit den Betaflight Parametern zu vertragen? Bitte Hilfe…
Hast du deine ESCs Kalibriert?
Lassen sie sich im Motortab einzeln ansteuern?
Am besten nochmal neu flashen und nur arming konfigurieren. Wenn es dann immernoch auftritt ist irgendwas an der Hardware faul.
Habe alle Motoren ohne Phasenkabel-Überkreuzung verlötet und dann 2 der 4 Motoren in BLHeli umgekehrt in ihrer Drehrichtung (reversed). Muss ich nun für 3D Flug zwingend zuerst alle Motoren auf Drehrichtung „normal“ richtig drehend umlöten und kann nur so 3D fliegen oder gibt es eine Möglichkeit, auch im Modus „bidirektional“ die Drehrichtung zu invertieren? Eventuell mit einem mmix Befehl im CLI von BetaFlight?
Hallo Reinhard,
Genau, die Drehrichtung musst du für den 3D Mode vorher durch korrektes verlöten festlegen.
Gruß,
Phil
Hallo!
Ich habe meinen Flug-Controller auf der Grundlage der Beschreibung. (CC3D cleanflight Version 1.1)
Esc nur Piep, nicht gestartet werden.
Wenn ich direkt Rx esc, es funktioniert perfekt. Drosselklappen Mitte esc Bootmontageposition , Gas und vorwärts bewegen, rückwärts, die Motoren drehen nach rechts, nach links.
Wenn esc an den Controller angeschlossen ist, funktioniert nicht, warum?
Hallo Philipp,
tolle Anleitungen die Du hier verfasst hast.
Muß man eigentlich die Regler vor dem 3D Setup kalibrieren?
Also in BlHeli die Motor Direction „normal“ verwenden, und die Regler erstmal anlernen, oder entfällt dieses?
Ja, solltest du machen.
Hallo Phil,
danke für die schnelle Antwort.
Kann aktuell über Cleanflight die Regler nicht kalibrieren.
Beeinflußen die oben erwähnten CLI-Befehle die Kalibrierung?
Wenn ja, wie bekomme Ich Diese wieder gelöscht?
Direkt am Empfänger angeschlossen, kann Ich den Regler anlernen. Hier erstellt er dann in BlHeli neue PPM Min / Max Throttle Werte. Diese lasse Ich dann aber so drin, wenn Ich später auf Bidirectional umstelle?
Hallo,
Ich hab mir auch einen 3D Quadrocopter gebaut.
Afro 30A Regler mit SimonK 3D geflasht.
Naze32 im 3D Modus
Alles funktioniert bestens und er fliegt echt gut. Auch Invert.
ABER: Um richtige 3D Figuren zu fliegen ist mir die minimum Drehzahl beim umschalten der Richtung zu niedrig.
Hab’s schon über Throttle Minimum probiert, was im positiven Drehzahbereich auch funktioniert. Jedoch wenn ich dann reviesiere, also quasi negativ Pirch gebe, ist immer noch die niedrige Drehzahl, wie vorher da. Hoffe Du verstehst was ich meine.
Eine Idee wie ich die Minimum Drehzahl in beide Richtungen erhöhen kann?
Hey,
müsste das nicht über „3d_deadband_low“ gehen?
https://github.com/borisbstyle/betaflight/wiki/3D-Setup
3d_deadband_low: This is the lowest value for negative throttle output from the flight controller to the ESC when armed, the highest value for negative throttle output from the flight controller to the ESC when armed is min_command. The range between 3d_deadband_low and min_command is the total negative throttle output range.
NOTE: To find values for 3d_deadband_high and 3d_deadband_low the motors tab in the configurator can be used to find the value closest to mid_rc which spins all motors consistently in each direction. These numbers should be fairly evenly spaced from mid_rc and should be set as close to mid_rc as possible with mid_rc being centered between the values for 3d_deadband_high and 3d_deadband_low in order to rotate the motors at identical speed in either direction while the throttle is centered.
Hallo Phil
Super interessante und aufschlussreiche Seite, was vom Besten was im Netz zu finden ist.
Deine Anleitungen sind der Hammer.
Nun hab ich da mal eine Frage:
Ich habe ein paar HK ESC’s mit SimonK gelasht zum 3D fliegen, funktionieren auch. Nach dem durchlesen deiner Anleitung bin ich mir nicht mehr sicher ob die mit dem Naze32 auch funktionieren da du nur von BlHeli schreibst.
Für eine kurze Antwort wäre ich dankbar.
Hey Roger,
wenn die ESCs schon für 3D konfiguriert sind klappts natürlich auch ohne BLHeli.
Dabei kommt es ja nur darauf an, ab was für einem throttle Wert dir ESCs umschalten.
Beste Grüße,
Phil
Hallo Phil
Dass ging ja fix.
Besten Dank für Deine Antwort, jetzt bin ich beruhigt, muss nicht nochmal neu flashen.
Gruss
Roger